Dynamiczny hamulec silnika indukcyjny (lub hamowanie reostatyczne):
(A) Dynamiczny hamulca AC – Dynamiczne hamowanie prądu przemiennego silnika indukcyjnego uzyskuje się, gdy silnik jest wykonywany na zasilaczu pojedynczej w fazie poprzez odłączenie fazy źródłowej i pozostawiając ją otwartą (ryc. 6.15 (b)) lub poprzez podłączenie go z inną fazą maszynową (ryc. 6.15 (c)).
Dwa połączenia fig. 6.15 (b) i (c) są odpowiednio nazywane dwoma i trzema wiodącymi połączeniami. Po podłączeniu do zasilacza 1 -fazowego silnik można uznać za zasilany przez sekwencję dodatnią i ujemną w trzech fazach napięć.
Moment netto wytwarzany przez maszynę jest sumą par z powodu dodatnich i ujemnych napięć sekwencji. Gdy wirnik ma wysoką opór, moment obrotowy netto jest ujemny i uzyskuje się operację hamowania. Analiza silnika dla dwóch i trzech wiodących połączeń jest wykonana w następujący sposób:

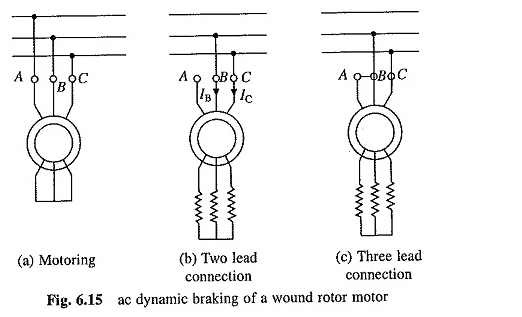
Dwa połączenia wiodące: Załóżmy, że faza A silnika podłączona w Y tam w otwartym obwodzie. Następnie IA = 0 i IC = -ib. W konsekwencji składniki dodatniej i ujemnej sekwencji IP i w, odpowiednio, są podane przez

gdzie α jest podawane przez równanie. (6.17).
Ponieważ elementy sekwencji dodatnie i ujemne są równe i przeciwne, dwa równoważne obwody można połączyć z opozycją szeregową. Napięcie, które należy zastosować do tej kombinacji szeregowej

Z zastosowanym napięciem JVBC / √3 Jeśli prąd jest ip = – in = jib / √3, następuje tylko z przyłożonym napięciem fazowym v, prąd wynosiłby IB / √3. Dlatego równoważny obwód można narysować, jak pokazano na rysunku 6.16 (a).
Chociaż wartości składników sekwencji dodatnich i ujemnych prądu są równe, odpowiadające pary nie są. Charakter krzywych prędkości prędkości dla dodatnich i ujemnych prądów sekwencji oraz moment obrotowy netto przedstawiono na rysunku 6.16 (b).
Dzięki odpowiedniemu wyborze odporności na wirnik moment hamowania można uzyskać w całym zakresie prędkości. Ponieważ wymagany wirnik jest duży, dynamiczne hamowanie silnika indukcyjnego może być stosowane tylko w silnikach wirnika.
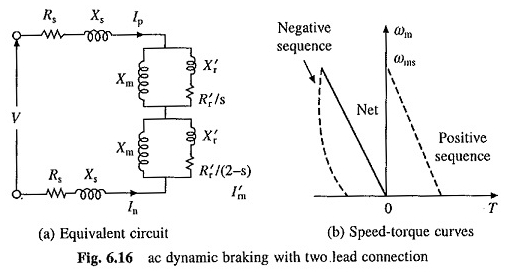
W związku z dużymi prędkościami (lub niskimi wartościami przesuwnymi) impedancja części pozytywnej części sekwencji staje się bardzo wysoka. Ponieważ elementy dodatniej i ujemnej sekwencji prądu muszą być równe, moment hamowania netto jest mały, a zatem hamowanie nie jest bardzo skuteczne.
Połączenie z trzema granulkami: Tutaj dwie fazy kołowrotka podłączonego silnika Y są połączone równolegle szeregowo z trzecią fazą (ryc. 6.15 (c)). Pozostaw fazy a i b

W przeciwieństwie do dwóch połączeń ołowiu, wielkość składników dodatniej i ujemnej sekwencji napięcia jest równa, a nie składniki dodatniej i ujemnej sekwencji prądów. Równoważny obwód pokazano na rysunku 6.17.
Części dodatniej i ujemnej sekwencji obwodu są niezależne, a zatem nie nakłada się żadne ograniczenie na składnik sekwencji ujemnej prądu przez dodatnią część sekwencji równoważnego obwodu.
W ten sposób uzyskuje się pary o wyższym hamowaniu (w porównaniu z dwoma połączeniami ołowiu) przy dużych prędkościach. Charakter charakterystyki prędkości pisklęcia z tym połączeniem jest taki sam jak na ryc. 616 (b).
Wszelkie nierówności między rezystancjami kontaktowymi w połączeniach dwóch faz równoległych zmniejszają moment obrotowy hamowania, a nawet może prowadzić do momentu obrotowego samochodowego, ponieważ stan ten dąży do dwóch połączeń ołowiu z rosnącą odpornością w jednej z dwóch faz (podobnie jak opór zastosowanego wirnika jest niższy niż połączenie z dwoma przewodami).
W związku z tym połączenie z dwoma ołów jest ogólnie preferowane pomimo jego słabego momentu obrotowego. Głównym zastosowaniem hamowania CA w pojedynczej fazie jest wysokość dźwigu.
(b) Zwlekające się hamowanie za pomocą kondensatorów: W tej metodzie trzy kondensatory są stale utrzymywane przez zaciski silnikowe. Wartości kondensatorów są zatem wybierane, ponieważ gdy są odłączone od linii, silnik działa jako samokontrowany generator indukcji.
Połączenie hamowania jest reprezentowane na rysunku 6.18 (a), a proces samokontroli wyjaśniono na rysunku 6.18 (b) w przypadku braku ładowania. Krzywa A nie jest krzywą magnetyzacji maszyny maszyny z daną prędkością, a linia B reprezentuje prąd przez kondensatory, podane przez
![]()
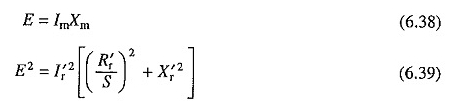
gdzie E jest stojana indukowanym przez stojana według fazy.
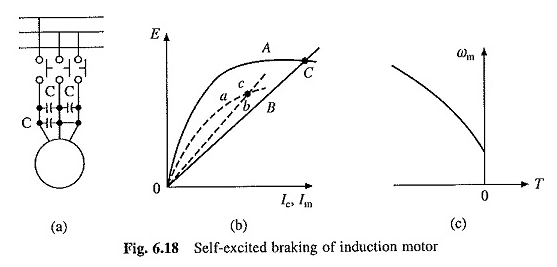
Kondensatory zapewniają prąd reaktywny niezbędny do podniecenia. Operacja występuje w punkcie C, który jest przecięciem dwóch cech. Gdy prędkość spada, uzyskana jest wartość E dla tego samego prądu magnetyzacji i nowa cecha magnetyzacji A.
Z drugiej strony nachylenie charakterystycznego E przeciwko IC wzrasta, nadając nową charakterystykę B. Przecięcie dwóch krzywych występuje teraz c. Zatem zmniejszenie prędkości podczas przesuwania krzywej magnetyzacji w dół, nachylenie napięcia kondensatora w porównaniu z krzywą prądu wzrasta.
Przy pewnej krytycznej prędkości, która jest ogólnie wysoka, dwie krzywe nie spotykają się, a maszyna się nie podnieca, a moment obrotowy hamowania spada do zera. Charakterystyka samoroznacznej prędkości hamulca jest przedstawiona na rycinie 6.18 (c).
Czasami oporność zewnętrzna jest połączona na zaciskach stojana w celu zwiększenia momentu hamowania i rozproszenia pewnej energii wytwarzanej poza maszyną. Konstrukcja z rysunku 6.18 (b) jest ważna tylko dla dowolnej operacji ładowania.
Aby uzyskać dokładniejszą analizę, należy wziąć pod uwagę zmniejszenie impedancji motorycznej. Ten schemat jest rzadko używany, ponieważ moment hamowania spada do zera z prędkością, która jest ogólnie wysoka.
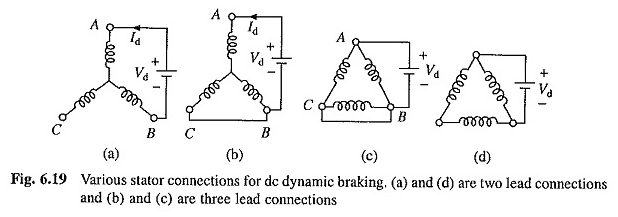
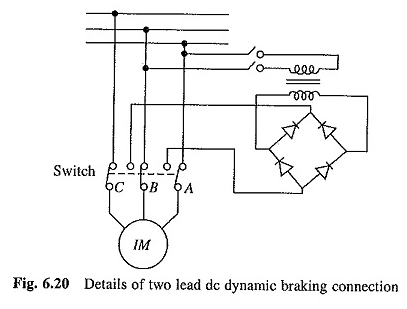
(C) Dynamiczny hamulca CC: Uzyskuje się, gdy stawca silnika indukcyjnego działającego z prędkością jest podłączony do bezpośredniego zasilania. Dwa powszechnie używane połączenia, dwa i trzy ołowiu, dla połączeń Star i Delta są przedstawione na rysunku 6.19.
Metodę uzyskiwania zasilania DC za pomocą mostu diodowego dla dwóch połączeń ołowiu ilustrują na rysunku 6.20.
Prąd CC przekraczający stojar wytwarza stacjonarne pole magnetyczne. Ruch wirnika w tym polu indukuje napięcie w wirniku wirnika. Dlatego maszyna działa jako generator.
Wytworzona energia jest rozpraszana w odporności na obwód wirnika, co daje dynamiczne hamowanie silnika indukcyjnego.
Ponieważ pole jest stacjonarne, względna prędkość między sterownikami wirnika a pole wynosi teraz ωm. Indukowana częstotliwość napięcia będzie równa częstotliwości napięcia źródła Ca (lub częstotliwości silnika nominalnego), gdy ωm = ωms.
Lub napięcie indukowane w wirniku podczas wyścigu z prędkością synchroniczną. Gdy działa z prędkością ωm, napięcie indukowane i jego częstotliwość będą odpowiednio SER i SF. WIĘC

Daje to równoważny obwód w fazie z rysunku 6.21 (a) dla wirnika. Podział wszystkich ilości według S spowoduje wytworzenie obwodu równoważnego częstotliwości nominalnej.
W odniesieniu do różnych równoważnych parametrów obwodu, w ten sposób uzyskane z wież stojanych, daje równoważny obwód w fazie wirnika zilustrowanego na rysunku 6.21 (b). Równoważny obwód stojana pod dynamicznym hamowaniem DC silnika indukcyjnego pokazano na rysunku 6.21 (c).
Aby połączyć z równoważnym obwodem wirnika na rysunku 6.21 (b), musimy najpierw uzyskać równoważny obwód według fazy stojana przy częstotliwości nominalnej. Obwód równoważny Ryc. 6.21 (c) sugeruje, że stojany MMF jest stały i niezależny od prędkości.
W związku z tym wyobrażamy sobie, że stojan jest zasilany przez trzypasowe zrównoważone źródło zasilania częstotliwości nominalnej, co daje prąd fazowy. Obecny CA jest równoważny ID, pod warunkiem, że wytwarza MMF stojana o tej samej amplitudzie co bieżący identyfikator CC.
W ten sposób zastępujemy stacjonarny stojan MMF wytwarzany przez CC prąd ID z MMF (wytwarzanym przez IS) o identycznej amplitudzie, ale obracając się z prędkością synchroniczną.
Różnica tych dwóch MMF będzie MMF z szczeliną powietrzną, która będzie odpowiedzialna za wytwarzanie szczeliny powietrznej, która z kolei powoduje napięcie częstotliwości nominalnej indukowanej w stojanie. Obwód równoważny w fazie stojana na częstotliwości nominalnej przyjmuje zatem ilustrowaną formę na ryc. 6.21 (d).
Łączenie równoważnych obwodów z ryc. 6.21 (6) i (d), a wycofanie transformatora daje częstotliwość nominalną przez równoważność obwodu w fazie (ryc. 6.21 (e)).

Jest niewielki dla małych S, a zatem podejścia. Ze względu na wysoką wartość wiadomości błyskawicznych obwód magnetyczny jest nasycony. Zatem XM nie jest stały, ale zmienia się w zależności od IM. W celu dokładnej analizy należy wziąć pod uwagę zmianę XM z IM.
Zależność między IS a ID zależy od połączenia stojana. Na przykład wyprowadzajmy to dla dwóch połączeń wiodących na rysunku 6.19 (a). Tutaj IA = ID i IB = – ID.
Jeśli n jest efektywną liczbą zakrętów w każdym uzwojeniu, maksymalna MMF wytwarzana przez fazę A będzie IDN, a maksymalna MMF wytwarzana przez fazę B będzie (-idn). Zakładając, że te MMF są rozmieszczone sinusoidalnie w przestrzeni, wynik powstałego MMF będzie
Gdy maszyna jest zasilana przez zrównoważone trzy -fazowe źródło prądu, szczyt stojana MMF jest

Jest równoważne ID, gdy f = f ’. Dlatego z równań. (6.35) i (6.36)
![]()
Wartości są dla innych połączeń (odpowiednio ryc. 6.19 (b), (c) i (d)) to:
![]()
Charakterystyka prędkości Torca jest obliczana w następujący sposób.
Z równoważnego obwodu z rysunku 6.21 (e)
Rozważ rozkład prądów między równoległymi gałęziami utworzonymi przez XM i wirnikiem

Odejmowanie równania. (6.39) z (6.40)

Równania (6.39)

Moment obrotowy silnika jest

Ponieważ XM zależy od IM, równ. (6.38) – (6.42) to nieliniowe równania algebraiczne. Zastosowanie następujących kroków pozwala uniknąć potrzeby rozwiązania cyfrowego. Załóżmy, że wartość IM, uzyskaj e odpowiadającą charakterystyce magnetyzacji, oblicz XM na podstawie równania.
(6.38), uzyskaj R z (6,41), oblicz S z (6,42), a następnie ωm i t z równań. (6.34) i (6.43) odpowiednio.
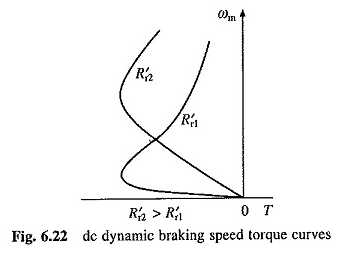
Rysunek 6.22 pokazuje charakter krzywych momentu obrotowego prędkości dla dwóch wartości odporności na wirnik. W silniku klatki wiewiórkowej lub silnika wirnika z drewna bez zewnętrznego w wirniku maksymalny moment obrotowy występuje przy niskiej prędkości.
Podczas gdy maksymalny moment obrotowy jest niezależny od odporności na wirnik, prędkość, z jaką występuje maksymalny moment obrotowy, wzrasta wraz z odpornością na wirnik. Kiedy ryc.
6.22 DC Dynamiczne hamowanie indukcyjnej prędkości silnika Para Krzywe Szybkie hamowanie jest szybkie hamowanie, sensacyjny rezystancja jest połączona w obwodzie wirnika i jest wycinana wraz z spadkiem prędkości.
W przypadku utrzymania aktywnego obciążenia, podobnie jak w wiatrach kopalni, wysoki opór jest podłączony w celu uzyskania krzywych przyspieszania ujemnym nachyleniem, aby zapewnić stabilność w stanie równowagi.
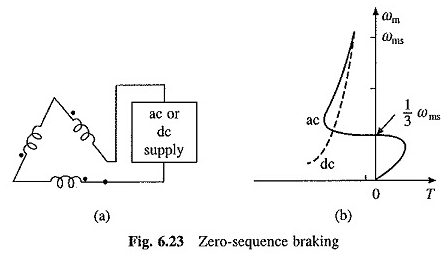
(D) Zerowa sekwencja wolna: W tym hamowaniu trzy fazy stojanowe są połączone szeregowo przez jednofazowe AC lub źródło CC, jak pokazano na rysunku 6.23 (a). Takie połączenie jest znane jako połączenie sekwencji zerowej, ponieważ prądy we wszystkich wyświetleniach stojana są współlatformami.
MMF spowodowane prądami współwodniowymi (lub sekwencją zerową) wytwarza pole magnetyczne trzykrotnie niż liczba biegunów, dla których maszyna jest naprawdę zwinięta. Dzięki zasilaczowi AC, powstałe pole jest nieruchome w przestrzeni i idzie na częstotliwość zasilania.
Dzięki zasilaczowi DCE powstałe pole ma stacjonarne miejsce w przestrzeni i ma stałą wielkość. Ważną zaletą tego połączenia jest jednolite obciążenie wszystkich faz stojana. Charakter krzywych prędkości prędkości dla zasilacza prądu przemiennego i CC pokazano na rysunku 6.23 (b).
Dzięki dostawce prądu naprzemiennego hamowanie można zastosować tylko do jednej trzeciej prędkości synchronicznej. Jednak pary hamowania wytwarzane przez to połączenie są znacznie większe niż samochód. Silnik działa głównie w hamowaniu regeneracyjnym.
W przypadku silników o niskiej odporności na wirnik odzyskuje się ważną część wygenerowanej energii. W przeciwieństwie do dynamicznego hamowania prądu przemiennego silnika indukcyjnego, nie wymaga on wysokiej odporności na wirnik i dlatego może być używany zarówno z silnikami wiewiórki i silników Roton.
Dzięki zasilaczowi hamowanie jest dostępne w całym zakresie prędkości. Jest to zasadniczo dynamiczne hamowanie, ponieważ cała wytwarzana energia jest marnowana na odporność na wirnik.
Układ przełączania, od pracy z trzema fazą do normalnego zera, jest niezwykle prosty, gdy silnik ma stojan podłączony do delta.