Stojan w silniku
Indukcyjna Zasada obsługi silnika:
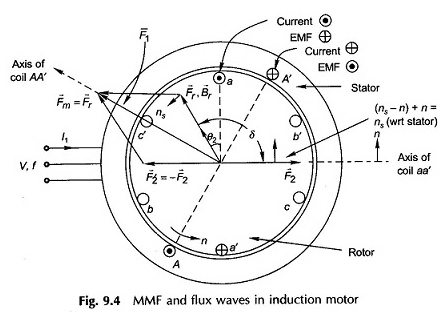
Zasada działania silnika indukcyjnego na rysunku 9.4 pokazuje widok przekrojowy silnika indukcyjnego. Stojan jest zasilany z trójfazowym zasilaczem napięcia v / fazowym i częstotliwości F Hz. Rotor jest ranowany w 3 fazach dla tylu biegunów, jak stojana i jest zwarta. Zakłada się, że oporność stojana i reaktancja wycieków jest nieistotna
![]()
Lub
- E1 = EMF indukowane przez stojana / fazę
- KW1 = współczynnik uzwojenia stojana
- NPH1 (seria) = seria stojana / fazy
- Φr = wynikowy bieg / biegun powietrzny
Jest to widoczne z równania. (9.1) Że niezależnie od istniejących warunków obciążenia na wirnik, φr, przepływ / biegun ustalony w podwyżce powietrza jest stały, powiązany z napięciem zastosowanym do dokonanej hipotezy.
Wektor MMF F̅R z wektorem gęstości przepływu B̅R, który jest odpowiedzialny za produkcję φr, działa z synchroniczną prędkością, ponieważ jest powiązany z 3 zrównoważonymi prądami 3 -fazowymi narysowanymi przez stojan.
Względna prędkość między B̅R a wirnikiem powoduje indukcję prądu wzoru w zwarciu wirnika.
Moment obrotowy wytwarzany przez interakcję B̅R i prądy wirnika przez prawo Lenza miałyby tendencję do przenoszenia wirnika w kierunku obrotu B̅R w celu zmniejszenia prędkości względnej.
Silnik jest zatem samozadowolenia, a wirnik nabiera stałej prędkości n
Rycina 9.4 pokazuje względną lokalizację wektorów F̅R, B̅R (GAP Air Gap MMF i gęstość przepływu), F̅2 (wirnik MMF), w którym F̅R prowadzi F̅2 według kąta δ = 90 ° + θ2 (działanie samochodowe), θ2 jest kątem, pod którym EMF wirnika.
Kąt θ2 jest jednak bardzo mały, ponieważ reaktancja wirnika jest znacznie mniejsza niż odporność na wirnik. Wektor stojana MMF jest następnie podany przez
![]()
znajduje się na schemacie wektorowym. Dopóki schemat jest narysowany, stojan i faza wirnika A (reprezentowana w postaci pojedynczej cewki) są maksymalne. Czytnik może sprawdzić lokalizację wektorów z bieżącej fazy stosującej właściwą regułę.
Przesuwanie i częstotliwość prądów wirnika:
W odniesieniu do ryc. 9.4 łatwo zaobserwowano, że B̅R porusza się z prędkością (ns – n) w odniesieniu do sterowników wirnika (w kierunku B̅R). Jest to znane jako prędkość poślizgowa. Zmiana jest zdefiniowana jako

Oczywiście s = 1 dla n = 0, to znaczy dla wirnika stacjonarnego i s = 0 dla n = ns, to znaczy dla wirnika działającego z prędkością synchroniczną.
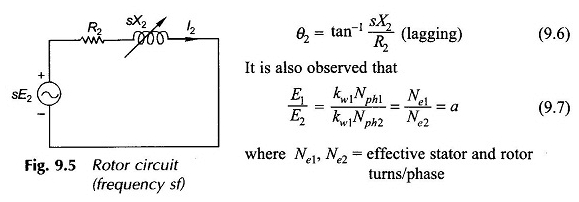
Częstotliwość prądów indukowanych w wirniku wynosi
Normalny krzyk z całkowitym obciążeniem zasady działania silnika indukcyjnego wynosi około 2% do 8%, więc częstotliwość prądów wirnika wynosi zaledwie 1 do 4 Hz.
Wirnik według fazy EMF przy S = 1 (Rotor Shift) jest podany przez
![]()
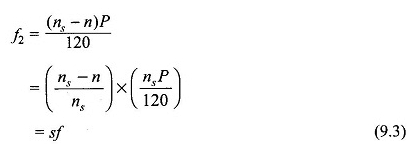
Na każdej zmianie częstotliwość wirnika SF, EMF indukuje przez wirnik, jest przekształcany w SE2. Teraz rozważ impedancję obwodu wirnika
![]()
Lub
- X2 = reaktancja wirnika wirnika po zatrzymaniu (częstotliwość wirnika = częstotliwość stojana, f)
Gdy wirnik działa przy poślizgu, jego częstotliwość jest SF, jego impedancja jest przekształcana w
![]()
Stwierdzono zatem, że częstotliwość prądów wirnika, jego indukowana MES i reaktancja różnią się bezpośrednią proporcją do przesunięcia. Rysunek 9.5 pokazuje obwód wirnika o przesuwaniu s. Kąt fazy obwodu to
Produkcja MMF i momentu obrotowego wirnika:
Na rycinie 9.4 Gdy wektor gęstości przepływu wynikający z B̅R działa z prędkością (ns – n) w odniesieniu do wirnika, maksymalna dodatni emf jest indukowana w cewce wirnika AA (wskazana kropką w sterowniku A i krzyżu w sterowniku a ’), gdy B̅R jest na poziomie 90 ° przed spadkiem.
Ponieważ prąd w wirniku opóźnia się za EMF θ2, prąd w cewce aa „będzie maksymalny dodatni, gdy B̅R będzie dalej pod kątem θ2. W tej chwili wektor MMF wirnika F̅2 będzie wzdłuż osi cewki AA.
Widać zatem, że B̅R (lub F̅R) jest pod kątem δ = (90 + θ2) przed F̅2. Ponadto F̅2 spowodowane przez prądy wirnika częstotliwości F2 = SF działa w porównaniu z sterownikiem wirnika z prędkością (ns – n) i przy prędkości ns.
Jeśli chodzi o stojana, ponieważ sam wirnik porusza się w tym samym kierunku z prędkością N w porównaniu do stojana.
Zatem zarówno F̅R, jak i F̅2 poruszają się z synchroniczną prędkością NS w porównaniu do stojana i są stacjonarne w odniesieniu do innych z F̅R znajdującymi się przed F̅2 pod kątem (90 ° + θ2).
Interakcja pola wirnika i powstałe pole tworzy parę w kierunku obrotu F̅R.
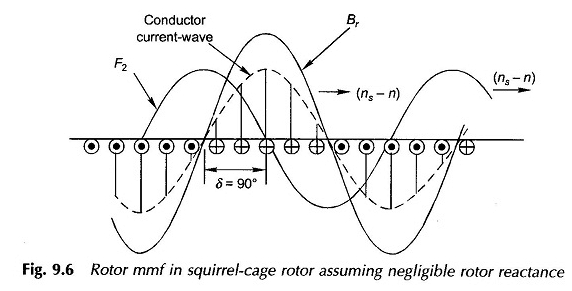
Teraz rozważ przypadek wirnika wiewiórki z sterownikami rozłożonymi równomiernie wokół obrzeża wirnika. Reakcja wirnika MMF F2 jest lepiej wizualizowana z rozwiniętego schematu z FIG.
9.6, w którym wirnik jest wyobrażany jako stacjonarny, a brązowa fala – poruszająca się w porównaniu z nią z prędkością przesuwaną (ns – n). Że reaktancja wirnika jest uważana za nieistotną, tak aby prądy kierowcy (zwarte) były zgodne z sterownikiem EMF.
Obecny wzór kierowcy jest zatem rozproszony sinusoidalnie i znajduje się w fazie przestrzennej z krótkim i porusza się z nim synchronicznie. Fala MMF wirnika jest przechowywaną sinusoidalną z taką samą liczbą biegunów, jak ruch fali surowej.
Jego fundamentalne (F2) reprezentowane na rysunku 9.6 prawa BR twierdzą o 90 °. Jeśli reaktancja wirnika jest teraz wystawiona, fala prądu kierowcy, a zatem fala wirnika MMF byłaby spóźniona pod kątem θ2.
Zatem kąt między BR a falą F2 byłby (90 ° + θ2), taki sam jak w wirniku rany.
Rotor kustki wiewiórki reaguje zatem w taki sam sposób jak wirnik rany, z tym wyjątkiem, że liczba faz nie jest oczywista – można go uznać za posiadające tyle faz, co pręty / bieguny. Rotor wiewiórki można zawsze zastąpić równoważnym wirnikiem rany trzema fazami.
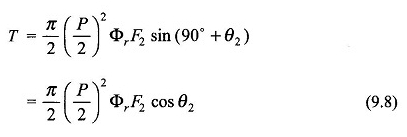
Jest to widoczne z równania. (9,8) niż wirnik o niskiej reakcji (słaby θ2 = tan-1 jsx2 / r2) wygeneruje większą parę dla φr, f2 i s.
Silnik wiewiórki klatki jest pod tym względem wyższy w porównaniu z silnikiem wirnika rany, ponieważ wirnik klatki ma niższą reaktancję, ponieważ nie ma zwisu uzwojenia.
Bardzo ważną obserwacją, którą można dokonać w zasadzie obsługi silnika indukcyjnego tutaj, jest to, że chociaż prądy wirnika mają częstotliwość SF, MMF (F2) spowodowane przez nich działa z prędkością synchroniczną w porównaniu z stojanem.
Innymi słowy, reakcja prądów wirnika odpowiada prądom częstotliwości (f) stojana, który płynie na stacjonarnej cylindrycznej strukturze równoważnej umieszczonej wewnątrz stojana zamiast wirnika.
Lub, w przeciwnym razie, widoki prądów wirnika mają częstotliwość F, ale mają tę samą wartość RMS.
Wektor stojana MMF F̅1 znajduje się na rysunku 9.4 równania wektora
![]()
Ponadto F̅1 można podzielić na komponenty jako
![]()
gdzie f̅2 jest sprzeczne z F̅2 i równe wielkości i
![]()
Prąd stojany, który powoduje F̅1 Can, odpowiadający wektorowi EQ. (9.10), podzielić się na komponenty
![]()
Tutaj I̅M można rozpoznać jako prąd magnetyzacji pliku, który powoduje powstanie MMF FR i wynikowy przepływ / biegun, φr, podczas gdy składnik prądu stojana, który równoważy reakcję F2 prądu wirnika I2.
Rysunek 9.4 pokazuje również względną lokalizację cewki stojana AA i pozytywny kierunek prądu. Ten natychmiastowy obraz wektorowy utrzymuje się, gdy i2 ma maksymalną wartość dodatnią.
Aby F’2 anuluj F2, komponent prądu stojana, który równoważy wirnik MMF, musi być zgodny z prądem wirnika, jak pokazano na stojanie.

Jeśli chodzi o amplitudy, F’2 jest skierowany naprzeciwko F2, aby anulują się, podczas gdy I’2 i I2 muszą być przestrzegane proporcjonalnie równania. (9.13) i musi być w fazie.
Ponadto, przez odniesienie do ryc. 9.4, możemy łatwo zobaczyć, że w stojanie pozytywny kierunek EMF E1 jest przeciwny kierunku pozytywnego I1, podczas gdy w wirniku pozytywny kierunek I2 jest w pozytywnym kierunku SE2. Jest to podobne do przypadku transformatora.
Z kierunkiem prądu dodatniego w cewce stojana AA oznaczonej jak na rycinie 9.4 i wskazówce osi kolokwium, prawo indukcyjne, które zapewni pozytywny emf w opozycji do prądu

Ta zasada działania silnika indukcyjnego ma ten sam znak, co zastosowany w obudowie transformatora, tak że faza przepływu φr i prąd magnetyzacji, który tworzy ją późno E1 o 90 °. W modelu obwodu IM byłby zatem narysowany przez reaktancję magnesującą XM przez E1.