\"system vsi\" – regulacja prędkości obrotowej silnika indukcyjnego
Metody kontroli prędkości silnika indukcyjnego:
Jedynym sposobem kontrolowania prędkości silnika synchronicznego jest kontrolowanie częstotliwości i napięcia wejściowego, tak jakby utrzymywać stałą V / F. Z drugiej strony kontrola prędkości silnika indukcyjnego może być kontrolowana za pomocą następujących środków:
- Kontrola napięcia stojana
- Kontrola częstotliwości
- Przesuwana kontrola
1. Kontrola napięcia stojana:
Dotyczy to małych silników i obciążenia wentylatora, gdzie moment obciążenia wzrasta wraz z prędkością. Jak już wspomniano wcześniej, istnieją dwa sposoby kontrolowania wartości RMS napięcia stojana – kontrola fazowa i pełna kontrola cyklu.
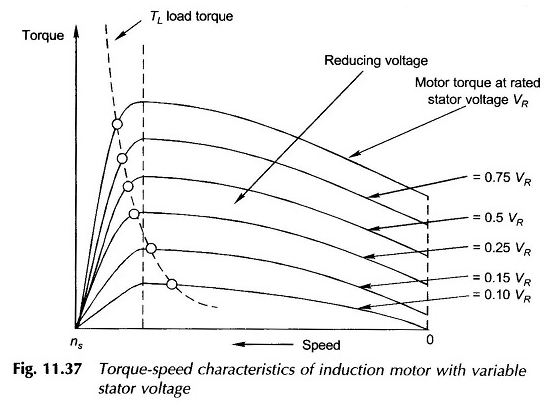
Charakterystyka momentu obrotowego silnika indukcyjnego z kontrolą napięcia stojana jest rysowana na rysunku 11.37. Maksymalny moment obrotowy jest zmniejszony jako kwadrat napięcia.
Rysunek pokazuje również, że regulacja prędkości jest możliwa tylko dla obciążenia, którego moment obrotowy maleje wraz z prędkością. Nawet wtedy regulacja prędkości nie jest uzyskiwana dla niskich prędkości – prędkość gwałtownie spada.
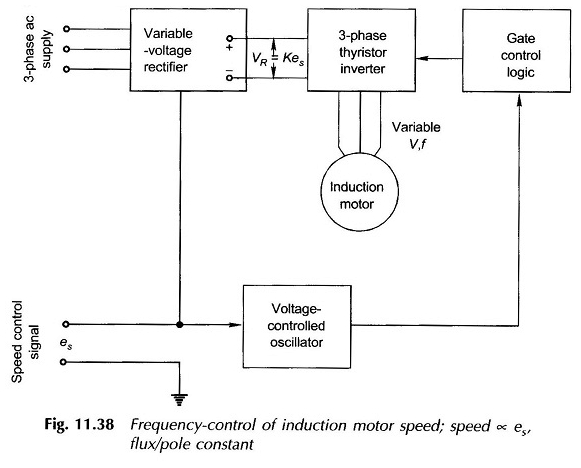
2. Kontrola częstotliwości:
Tutaj częstotliwość wejściowa jest zróżnicowana za pomocą falownika; W przypadku częstotliwości sub-normalnej napięcie stojana jest również zróżnicowane w celu utrzymania stałej V / F, która utrzymuje przepływ / słupek, co powoduje podwyżkę powietrza.
Typowy system sterowania z wykorzystaniem kontroli częstotliwości jest schematycznie zilustrowany na rysunku 11.38. Ze względu na poważne wydatki inwestycyjne system ten jest uzasadniony tylko dla dysków, w których niezbędne są solidne i niezbędne cechy silnika indukcyjnego.
W przeciwnym razie silnik CC z kontrolą konwertera jest logiczną i niedrogą alternatywą. Sercem schematu kontroli częstotliwości jest falownik tyrystorowy z trzema fazą.

Charakterystykę prędkości pary zmiennej kontroli częstotliwości, stałą V / F, zilustrowano na rycinie 11.39. Widzimy, że maksymalny moment obrotowy nie modyfikuje się, ponieważ przepływ / słupek jest utrzymywany na stałej wartości.
3. Sterowanie szybowania:
Wiadomo już, że podsynchroniczna kontrola prędkości silnika indukcyjnego jest możliwa poprzez wprowadzenie zmiennej rezystancji w obwodzie wirnika silnika indukcyjnego wirnika. Ta metoda zapewnia szeroki zakres prędkości i dobry moment początkowy, jak pokazano na rysunku 11.40.
Maksymalny moment obrotowy w tym przypadku pozostaje stały. Dobra regulacja prędkości jest możliwa do osiągnięcia dla stałego obciążenia momentu obrotowego i typu wentylatora.
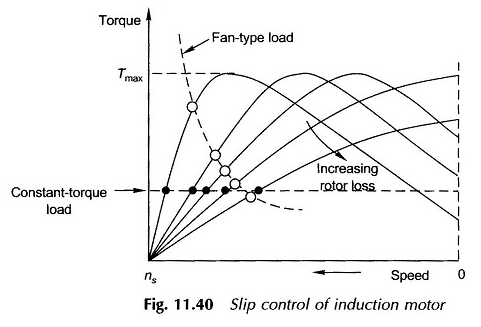
Największym wydrukiem kontroli prędkości silnika indukcyjnego jest jego słaba wydajność ze względu na moc zmarnowaną w zewnętrznym oporze wirnika.
Metoda kontroli ślizgowej opiera się na ogólnej zasadzie, że przesuwanie silnika indukcyjnego wzrasta wraz ze wzrostem utraty energii elektrycznej na obwodzie wirnika.
Utrata zmiennego obwodu wirnika można uzyskać za pomocą schematu wprowadzającego kontrolowanego konwertera w obwodzie wirnika dostarczającym stałą rezystancję, jak pokazano na rysunku 11.41.
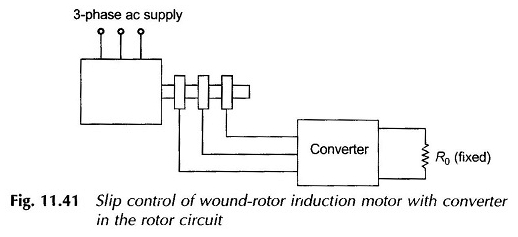
Zamiast marnować energię poślizgu w oporze zewnętrznym, można ją odzyskać i odnieść do zasilania, usuwając w ten sposób wadę niskiej wydajności metody kontroli poślizgowej.