Características de mudança de torque do motor de indução:
A expressão das características de deslizamento do torque do mecanismo de indução (t (s) é facilmente obtida ao encontrar o equivalente à tevenina do circuito à esquerda da AB na Figura 9.12.
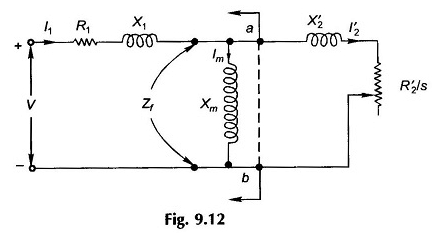
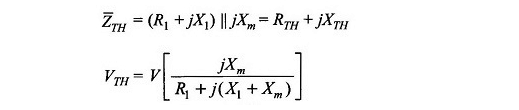
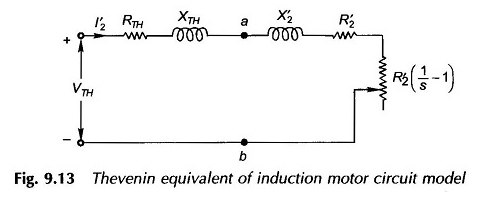
O circuito é então reduzido na Figura 9.13, no qual é prático tomar VTH como uma tensão de referência.
Na Figura 9.13

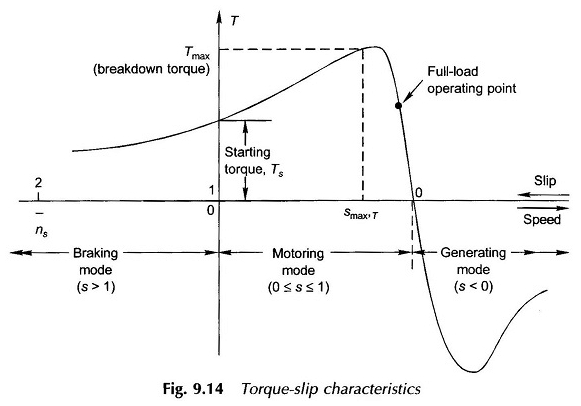
A equação (9.22) é a expressão do torque desenvolvido em função da tensão e da mudança. Para um determinado valor deslizante, o torque é proporcional ao quadrado de tensão. As características de deslizamento de torque do motor de indução na tensão fixa (nominal) são rastreadas na Figura 9.14.
As características das características de deslizamento do torque do motor de indução estão listadas abaixo:
1. Modo da motorista: 0 ≤ s ≤ 1
Para esse intervalo de deslizamento, a resistência da carga no modelo de circuito da Figura 9.13 é positiva, ou seja, para dizer que a potência mecânica é a saída ou o torque desenvolvido está na direção em que o rotor gira. Também:
- O casal é zero em s = 0, conforme previsto pelo raciocínio qualitativo.
- O torque tem um valor máximo, chamado torque de falha (TBD) no Slip Smax, t. O motor desaceleraria até que seja carregado com mais do que o torque de falha.
- Em s = 1, ou seja, quando o rotor está estacionário, o casal corresponde ao torque inicial, ts. Em um motor normalmente projetado, o TS é muito menor que o TBD.
- O ponto de operação normal está localizado bem abaixo do TBD. O deslizamento de carga total é geralmente 2,8%.
- As características de deslizamento de torque da indução do motor da proibição de co-carregamento um pouco além da carga total são quase lineares.
2. Modo de geração: S <0
A mudança negativa envolve o rotor operando a uma velocidade super síncrona (n> ns). A resistência da carga é negativa no modelo de circuito da Figura 9.13, o que significa que a potência mecânica deve ser implementada enquanto a energia elétrica é extinta nos terminais da máquina.
3. Modo de frenagem: S> 1
O motor opera na direção oposta ao campo rotativo (isto é, negativo), absorvendo a potência mecânica (ação de frenagem) que é dissipada na forma de calor no cobre do rotor.
Torque máximo (ventilação):
Enquanto o torque máximo e a mudança em que ocorre podem ser obtidos diferenciando a expressão da equação. (9.22), a condição para o torque máximo pode ser mais facilmente obtida a partir do teorema da transferência máxima de energia da teoria dos circuitos.
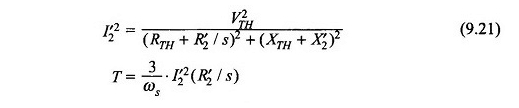
Como sabemos, o torque é máximo quando o i’22 (r’2 / s) é máximo, ou seja, a energia máxima é absorvida por R’2 / s na Figura 9.13. Esta condição é dada como

Substituindo na equação. (9.22) e simplificar

Observa -se imediatamente que o torque máximo é independente da resistência ao rotor (R’2), enquanto a mudança em que ocorre é diretamente proporcional a ele.
A característica deslizante de torque de um motor de indução com anel deslizante pode ser facilmente modificado pela adição de uma resistência externa, como mostrado na Figura 9.15a por quatro dessas características com crescente resistência progressiva no circuito do rotor. Podemos ver isso dependendo da equação.
(9.24), o torque máximo permanece inalterado de acordo com a equação. (9.23) O deslizamento para o torque máximo aumenta proporcionalmente à medida que a resistência é adicionada ao circuito do rotor.

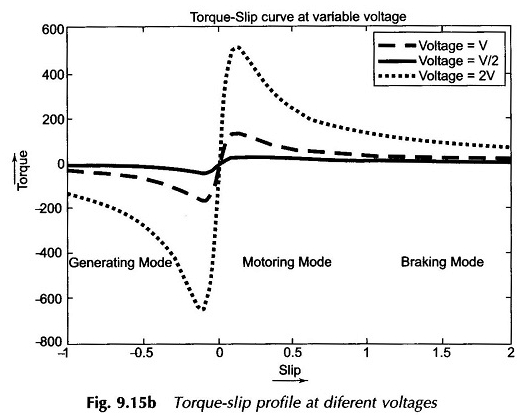
A Figura 9.15b indica o perfil TS com várias tensões de alimentação. A velocidade também pode ser controlada dessa maneira modificando a tensão do estator. Pode -se notar que o torque se desenvolveu em um motor de indução proporcional ao quadrado da tensão do terminal.
Casal de partida:
Deixando s = 1 na equação. (9.22)

O torque de partida aumenta adicionando resistência ao circuito do rotor. Da equação. (9.23) O torque de partida máximo é obtido para (smax’t = 1)

Ao mesmo tempo, a corrente de partida reduzirá (consulte a Eq. (9.21)). Essa é de fato a vantagem do motor de indução de anel deslizante, no qual um alto torque de partida é obtido em uma corrente de partida baixa.
Uma aproximação:
Às vezes, para ter uma sensação (resposta aproximada) da característica operacional, é prático assumir que a impedância do estator é insignificante que leva (ver Fig. 9.13)
![]()
No circuito equivalente da tevenina na Figura 9.13, para que vth = V. segue as equações (9.21) até (9.26) que

O torque de partida máximo é obtido na condição
Alguns relacionamentos aproximados de mudança de mudança:
Em torno da velocidade nominal (carga total), a deslizamento do motor de indução é tão pequena que
![]()
para que o X’2 possa ser completamente negligenciado em uma análise simplificada. Equações (9.27) e (9.28) então simplificam para
É imediatamente observado a partir da equação. (9.35) que as características de deslizamento do torque do motor de indução são quase lineares na região de baixa mudança, o que explica a forma linear da característica, como mostra a Figura 9.14.
Saída máxima de saída:
Como a velocidade do motor de indução é reduzida com a carga, a potência máxima de saída mecânica não corresponde à velocidade (deslizamento) à qual um torque máximo é desenvolvido. Para uma potência máxima de saída mecânica, a condição é obtida na Figura 9.13

A potência máxima pode ser encontrada correspondente à mudança definida pela equação. (9.36). No entanto, essa condição corresponde a uma eficiência muito baixa e a uma corrente muito grande e está muito além da região operacional normal do motor.
Limitação das características do turno do torque do motor do motor de indução:
Os valores dos parâmetros do modelo de circuito devem ser determinados em condições que se aproximam de perto da condição operacional para a qual o modelo deve ser usado.
Os parâmetros do modelo de circuito válidos para a condição operacional normal dariam resultados errôneos quando usados para valores de deslizamento anormal.
No início -Up, o motor puxa a corrente nominal várias vezes, resultando na saturação do núcleo e um aumento substancial no estator e o vazamento do rotor reage. Além disso, a frequência do rotor é alta (idêntica ao estator), os drivers do rotor têm maior resistência.
Consequentemente, os parâmetros bons para as condições operacionais normais dariam um resultado pessimista para a corrente de partida (maior que o valor real) e o torque de partida.