Características de velocidade do torque do motor de indução:
Da equação. 1.27 Pode -se observar que o torque máximo é independente da resistência ao rotor. No entanto, a mudança na qual o torque máximo ocorre muda com a resistência ao rotor.
Quando a resistência ao rotor aumenta, o deslizamento para o torque máximo também é o torque máximo e a faixa operacional estável do motor aumenta. As características típicas da velocidade do torque do motor de indução para diferentes valores de resistência ao rotor estão representadas na Figura 1.22.
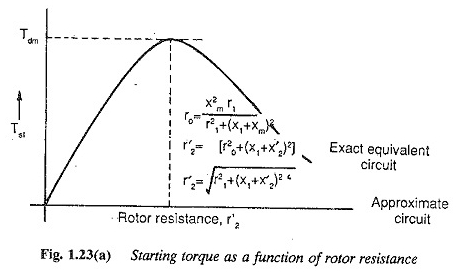
A partir da figura, observamos que o torque inicial pode ser aumentado aumentando a resistência ao rotor. O torque máximo ocorre no início -Up se a resistência ao rotor for aumentada para um valor.

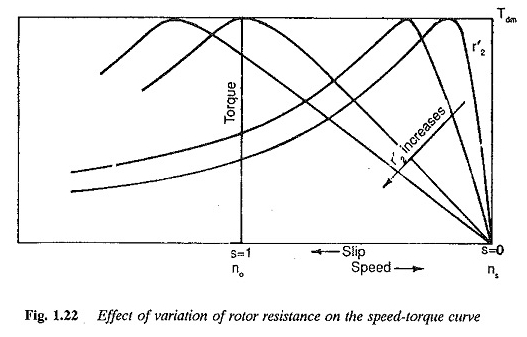
Se a impedância do estator for negligenciada, a resistência ao rotor deverá ser aumentada para um valor igual à reatância dos vazamentos do rotor. Se a resistência ao rotor aumentar além desse valor, o torque de partida diminuirá.
O torque de falha ocorre em slides maiores que um (na região de frenagem). A corrente de partida diminui e o fator de potência inicial é melhor para aumentar os valores de resistência ao rotor.
A mudança de carga completa muda, facilitando o controle de velocidade em uma faixa limitada quando a resistência do rotor é variada. No entanto, a eficiência é alterada para altas resistências do rotor devido a um aumento de perdas. O aquecimento do rotor está presente em um rotor de resistência intrinsecamente alta.
Em resumo, o desempenho inicial do motor é aprimorado com grandes resistências de rotor enquanto o desempenho das corridas é alterado.
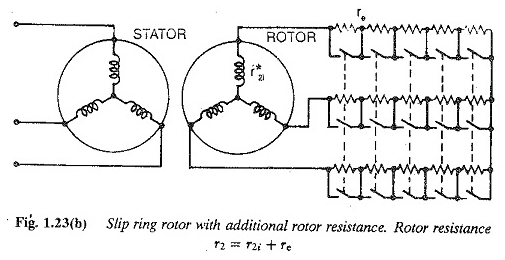
Para obter as vantagens de alta resistência ao rotor no início -up, resistência adicional é conectada no circuito do rotor do motor de indução do motorista da ferida e cortado lentamente à medida que o rotor acelera. Na velocidade nominal, o motor trabalha em sua característica natural. As conexões são representadas na Figura 1.23 (b).
No entanto, a conexão de resistência adicional não é possível nos motores de gaiola de esquilo. Construções de rotores especiais, como rotores de gaiola dupla e barra profunda, são usados.
No início -Up, devido à alta frequência do rotor, a corrente distribui na gaiola externa de um rútor da gaiola dupla ou na parte superior da barra no caso de um rotor de barra profundo. O efeito da alta resistência é alcançado.
À medida que o motor acelera, a frequência do rotor diminui e a corrente é distribuída nas duas gaiolas do rotor de gaiola dupla ou na barra completa no rotor da barra profunda. A resistência efetiva é pequena e o desempenho da corrida é melhorado. As curvas de velocidade de torque típicas são representadas na Figura 1.23.
Efeito da variação de tensão no mecanismo de indução:
A característica da velocidade chave de um mecanismo de indução pode ser modificada pelo efeito da variação de tensão no mecanismo de indução. As características típicas da velocidade do torque do motor de indução quando são fornecidas com tensão variável na frequência nominal são apresentadas na Figura 1.24 (a).
Eles são baseados no fato de que o torque do mecanismo de indução (com um determinado slide) varia como o quadrado da tensão. A mudança para o torque máximo é independente da tensão. O torque de carga total ocorre em diferentes turnos quando a tensão é variada.
Isso torna viável o controle de velocidade dos motores de indução em uma faixa limitada por variação na tensão de alimentação. No entanto, a capacidade de torque do motor diminui em baixa tensão, devido à redução no fluxo do espaço do ar. O fator de potência diminui.
O motor atrai correntes pesadas para desenvolver um torque de baixa tensão. A corrente atraída para diferentes tensões é ilustrada na Figura 1.24 (a), bem como o torque desenvolvido em uma corrente nominal em diferentes tensões.
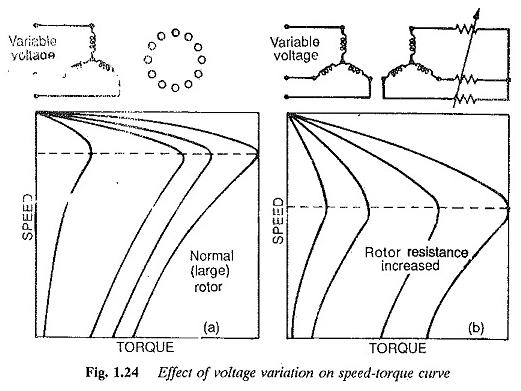
A Figura 1.24 (b) mostra as vantagens de alta resistência no rotor quando a tensão aplicada varia para modificar a característica da velocidade da velocidade.
Além de aumentar a faixa de controle de velocidade, a corrente desenhada pelo motor de baixa tensão pode ser limitada por uma escolha apropriada de resistência ao rotor.
Mudança de pólo no mecanismo de indução:
A curva de velocidade de velocidade de um motor de indução pode ser modificada por um enrolamento de reforço reconectado para fornecer diferentes conjuntos de postes. Quando o número de pólo muda no mecanismo de indução, o mesmo vale para a velocidade.
O tipo de conexão decide a carga autorizada a um torque constante ou uma potência constante. Esse método de mudança de postagem no mecanismo de indução é adequado para motores de gaiola de esquilo porque seus rotores podem adotar um certo número de pólos. Nenhuma reconexão do enrolamento do rotor é necessária.
Se, por outro lado, um rotor de anel deslizante for usado, ele deverá ser reconectado a diferentes conjuntos de pólos. O enrolamento postal resultante é usado para reconexão. A etapa da bobina muda de maneira eficaz em velocidades diferentes.
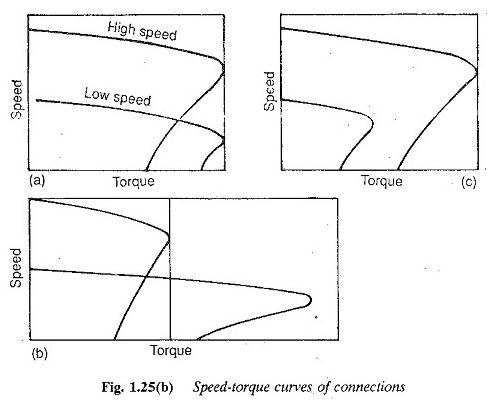
Cada fase tem um enrolamento dividido em metades. Estes são conectados em série ou em paralelo, para modificar efetivamente o número de pólos. As combinações possíveis são representadas na Figura 1.25.
O funcionamento constante de energia é fornecido pela conexão em série para altas velocidades e a estrela paralela para baixas velocidades. Em alta velocidade, um torque fraco é desenvolvido para que a potência seja constante. A tensão por metade é v / 2 na conexão de alta velocidade e v / √3 em baixa velocidade.
Conexões paralelas e séries de séries para altas velocidades para alta e baixa velocidade
Recuperação de energia deslizante do motor de indução:
A modificação da característica das linhas de velocidade usando uma resistência ao rotor variável apresenta a principal desvantagem da baixa eficiência, o que a torna lucrativa. A operação em baixa velocidade não é possível devido ao superaquecimento do rotor.
Essas baixas velocidades podem ser feitas de maneira muito eficaz, com eficiência razoável usando padrões de recuperação de energia deslizantes. A potência deslizante que é desperdiçada na resistência externa no circuito do rotor é retornada ao setor desses diagramas.
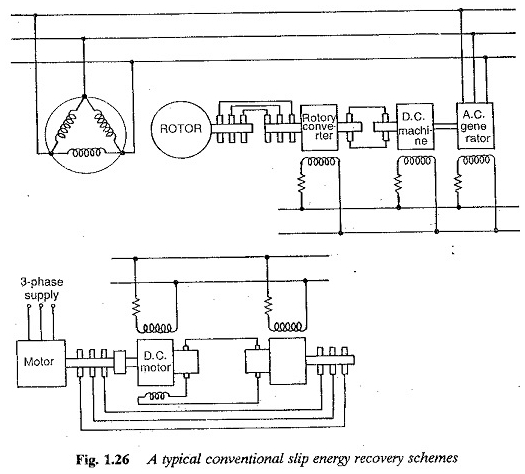
Os métodos convencionais de recuperação de energia deslizante usam máquinas rotativas, como conversores rotativos, alternadores, máquinas CC etc. no circuito do rotor para converter a energia na frequência de potência na frequência de energia para linha. Certos padrões convencionais típicos, chamados controles de Scherbius e Kramer, estão representados na Figura 1.26.

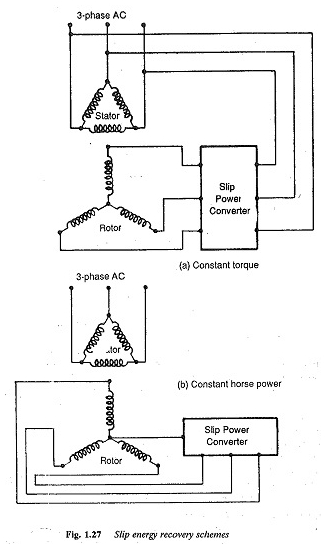
Quando esses métodos são usados, o motor / não deve operar para treinar o torque constante e as cargas de energia constantes. Estes são ilustrados na Figura 1.27 (a) e (b), em princípio. Na figura.
1.27 (a) A potência do rotor na frequência deslizante é convertida em frequência de linha por meio de um conversor deslizante. Se o conversor de energia deslizante permitir o fluxo de energia em ambas as direções, o motor poderá ser usado em velocidades sub e super síncronas.
Esse esquema é usado para causar cargas de torque constantes. Na operação subsíncrona, a potência deslizante é convertida em frequência de linha e fornecida ao setor. Na operação supersíncrona, a energia na frequência da linha é convertida em energia deslizante e fornecida ao motor.
Uma característica importante dessa modificação é que o torque desenvolvido é proporcional à corrente do rotor sob a hipótese de um fluxo constante no motor. As curvas de torque de velocidade para este diagrama são representadas na Figura 1.28 (a).
A modificação desejada das curvas de velocidade de torque mostrada na Figura 1.28 (a) é obtida controlando o conversor de energia deslizante para corresponder à tensão do motor a um determinado turno. O controle do conversor é representado pelo parâmetro A.
O aumento no aumento da tensão no lado do rotor do conversor de energia deslizante, causando uma queda de velocidade. Em maio, foi fixado para condições de vácuo, fixo a um valor vazio, o motor tem uma característica da velocidade de queda.
Por exemplo, A pode ser o ângulo de disparo do conversor no lado da linha no caso de esquemas de potência deslizante estática.
O diagrama ilustrado na Figura 1.27 (b) usa a potência deslizante para acionar uma máquina auxiliar. Nesse caso, o conversor de energia deslizante é acoplado ao rotor do motor de indução e desenha a energia. Aqui também, são possíveis velocidades sub e super síncronas.
Na operação subsíncrona, a máquina auxiliar converte a energia deslizante em energia mecânica. Na operação supersíncrona, a energia adicional é alimentada com enrolamentos do rotor através do conversor deslizante da máquina auxiliar. A conexão mantém poder constante.
As características da velocidade do torque do motor de indução são representadas na Figura 1.28 (b). Aqui também, um parâmetro do conversor deslizante escolhido para causar controle de velocidade como descrito acima, quando varia de uma maneira. A potência deslizante é gerenciada pelo eixo principal do motor. O torque diminui com um aumento na velocidade.
Com a disponibilidade de conversores de energia do tiristor, as cascatas de conversor estático (inversor do retificador) são usadas nos circuitos de rotor de motores de indução para obter as modificações acima mencionadas na característica da velocidade de torque. Os diagramas são representados na Figura 1.29 (a).
A potência deslizante é retificada e fornecida ao conversor de linha comum que alimenta a energia em direção ao setor. As curvas de velocidade obtidas pela variação no ângulo do inversor de disparo são representadas na Figura 1.29 (6). Um cicloconverteur também pode ser usado no circuito do rotor.
Injeção de tensão no circuito do rotor:
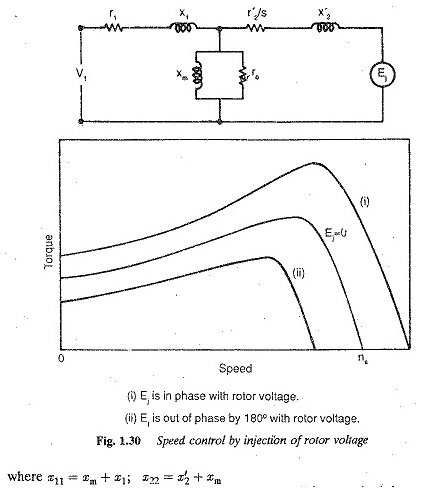
A característica do torque de um motor de indução pode ser modificada injetando uma tensão no circuito do rotor (rotor de ferida) de um motor de indução. A tensão injetada deve estar na frequência de deslizamento.
Se a tensão injetada for oposta à tensão do rotor, a corrente efetiva do rotor diminuirá, o que afeta instantaneamente o torque. O casal reduzido não pode dirigir a carga.
A velocidade do rotor diminui para um valor que garante a tensão de rotor induzida suficiente e, portanto, uma corrente do rotor para causar a carga. Se, por outro lado, a tensão injetada ajudar a tensão do rotor, levará a um aumento na corrente do rotor.
O aumento do torque desenvolvido acelera o rotor a uma velocidade na qual uma corrente de rotor suficiente flui para causar a carga. As curvas de torque de velocidade para ambos os casos são representadas na Figura 1.30.
Para comparação, também é indicada a curva de velocidade de torque de um rotor curto no circuito com tensão injetada zero. Segundo números, pode -se deduzir que é possível modificar a capacidade de torque do motor modificando a tensão injetada.
Quando a tensão injetada se opõe à capacidade de torque da corrente do rotor diminui, enquanto aumenta quando a tensão injetada facilita a tensão do rotor.
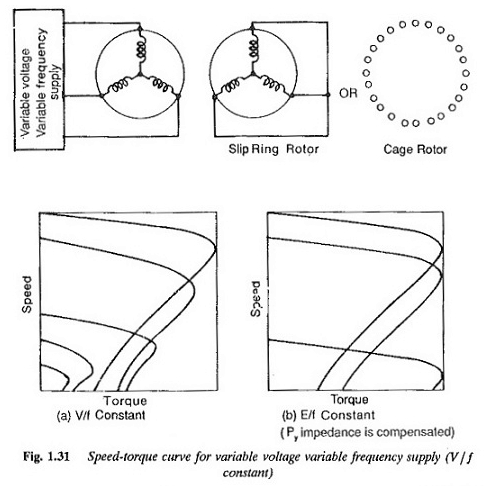
Variação na frequência de potência:
A velocidade de um campo magnético síncrono depende da frequência de potência. Consequentemente, variando a frequência de potência, a velocidade síncrona e, portanto, a velocidade do rotor pode ser variada.
Para evitar a saturação devido a um aumento no fluxo de baixa frequência, a tensão aplicada ao motor também é variada para que o fluxo permaneça constante em seu valor nominal em todas as frequências.
Para conseguir isso, um método simples é variar tanto a tensão quanto a frequência para que v / f seja constante. As curvas de velocidade de torque com constante V / F estão representadas na Figura 1.31.
Há uma exaustão de torque de baixa frequência. O motor reduziu a capacidade de torque e a capacidade de sobrecarga. Isso se deve ao efeito dominante da resistência do estator a baixas frequências.


A queda na resistência se torna apreciável em comparação com a tensão aplicada. Isso causa exaustão de fluxo, cuja consistência não pode ser mantida em baixa frequência. O casal desenvolveu com constante V / F é
Para ter o mesmo casal e a mesma capacidade de sobrecarga em todas as frequências, é necessário compensar a queda do estator (resistência) para manter E / F constante. V / F não é mais constante porque aumenta à medida que a frequência diminui. O casal desenvolvido neste caso é dado por

Ou
L ′ 2σ é a indutância dos vazamentos do rotor.
As curvas de velocidade de torque para constante E / F são representadas na Figura 1.31 (b).
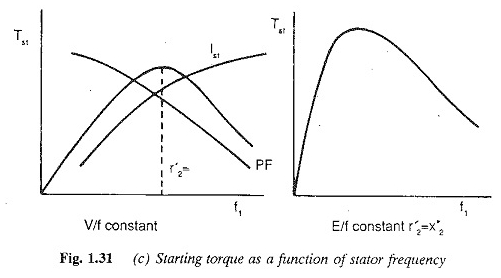
Com o controle V / F (constante), o torque de partida aumenta com uma diminuição na frequência, até um determinado valor. Abaixo desse valor de frequência, o torque de partida diminui. Esse efeito é considerado semelhante ao realizado modificando a reatância dos vazamentos do rotor.
À medida que a frequência diminui, a reatância dos vazamentos do rotor. À medida que a frequência diminui, a reatância dos vazamentos do rotor diminui. De fato, ocorre um aumento do rotor, resistência em comparação com a reatância de vazamentos.
Consequentemente, o torque de partida aumenta até uma certa frequência, onde a reatância dos vazamentos do rotor é igual à resistência ao rotor.
Se a frequência for reduzida, o torque de partida diminuirá. A variação do torque inicial com a frequência é ilustrada na Figura 1.31 (c). No entanto, com o controle constante de E / F, o torque de partida aumenta à medida que a frequência diminui para um valor decidido pelos parâmetros.
Se a frequência ainda diminuiu, o torque de partida diminuirá. A aceleração pode ser obtida a partir de um torque constante e uma corrente de reforço variando a frequência do estator a partir de um valor baixo, mantendo a constante E / F.
As características da velocidade do torque do motor de indução são obtidas aumentando a frequência de oferta além do valor nominal. O fluxo do motor diminui porque a tensão não pode ser aumentada além do valor nominal. O motor opera no fluxo do fluxo.
As curvas de velocidade de torque são paralelas entre si em todas as frequências, elas se estendem ao segundo quadrante, mostrando que a regeneração é possível.
A partida do motor pode ser facilmente realizada usando uma tensão variável, uma fonte de alimentação de frequência variável. Isso diminui a corrente de partida, dando um casal razoavelmente acelerando o bem a um bom fator de potência, mesmo com motores de gaiola com baixa resistência.
Controle de velocidade do motor de indução:
Um motor de indução de três fases é essencialmente um motor de velocidade constante. Não é possível obter um controle de velocidade suave do motor em uma ampla faixa, quando fornecido a partir de uma tensão constante de três fases convencional, de suprimento de frequência constante.
Os conversores de energia do tiristor tornaram possível a frequência variável e os suprimentos de tensão variável. Eles são usados para obter um controle de velocidade suave dos motores de indução em uma ampla faixa.
Os métodos de modificar as características da velocidade do torque do mecanismo de indução discutidos também são mais ou menos os métodos de controle. Os conversores de energia do tiristor são amplamente utilizados para adotar métodos de controle de velocidade, por exemplo
Um helicóptero para controlar a resistência ao rotor, o controlador de tensão CA para variar a tensão de alimentação, o conversor estático em cascatas para recuperação de energia deslizante, etc.