Construção do mecanismo de indução de três fases:
Um motor de indução de três fases que construiu um conversor tem as seguintes vantagens em uma linha nutrida na linha:
1. A start-up de lavanderia é garantida por uma frequência variável de um fundo
2. Iniciar e acelerar a corrente e o torque são possíveis.
3.A rede não está mais sujeita a uma alta corrente de sobretensão, como no interruptor direto na construção dos motores de indução de três fases da gaiola e, como tal, o equipamento de partida especial pode ser omitido mesmo com altas chances.
4. Muitos momentos de inércia podem ser acelerados sem precisar da dimensão do motor.
5.O conversor atua como um dispositivo de desacoplamento.
Consequentemente, o feedback do motor no ponto de curto-circuito não ocorre, quando as linhas curtas da linha, a classificação de curto-circuito, com base na qual o maior número de serviços deve ser exagerado é, portanto, baixo, permitindo que uma economia seja feita.
Como já foi indicado, a velocidade de construção do mecanismo de indução de três fases pode ser controlada, fornecendo ao estator uma tensão variável, uma fonte de alimentação de frequência variável usando conversores de frequência estática.
O controle de velocidade também é possível alimentando a potência deslizante no sistema de energia usando conversores no circuito do rotor. Basicamente, existem dois métodos diferentes de controle de velocidade.
1. Controle de controle Treinamento do controle da suspensão quando o estator é alimentado por tensão constante, tubos de frequência constante.
2. Controle do motor da massa usando uma tensão variável da frequência variável, operando o motor em uma frequência constante do rotor.
O controle de velocidade por variação na frequência de deslizamento é obtido da seguinte forma:
1. Controle de tensão do estator usando um controlador de tensão em três fases.
2. Controle da resistência do rotor usando uma resistência controlada por um helicóptero no circuito do rotor.
3. Usando uma cascata de conversor no circuito do rotor para recuperar a energia do turno.
4. Usando um cicloconverteur no circuito do rotor.
Controle de um mecanismo de indução por variação de tensão do estator (usando um controlador de tensão de três fases)
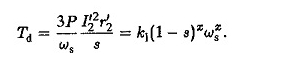
É muito sabido que o torque de uma construção de motores de indução de três fases varia diretamente proporcionalmente ao quadrado da tensão. O torque de um motor de indução é aproximadamente dado por

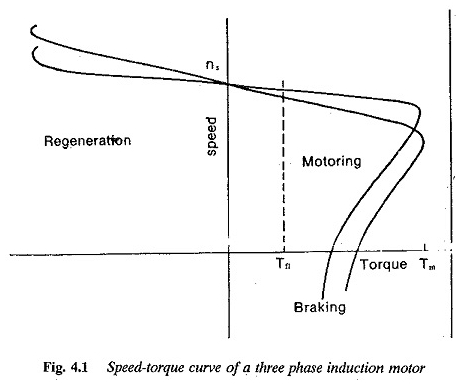
E a curva de velocidade de torque é como mostrado na Figura 4.1. O deslizamento para o torque máximo é dado por 
que é independente da tensão do estator. No entanto, isso pode ser variado pela variação na resistência ao rotor. O valor máximo de torque é dado por

Também muda como o quadrado da tensão aplicada. Se a tensão for reduzida para 80%, o torque máximo cai para 64%. A variação na tensão aplicada é obtida por meio de um controlador de tensão.
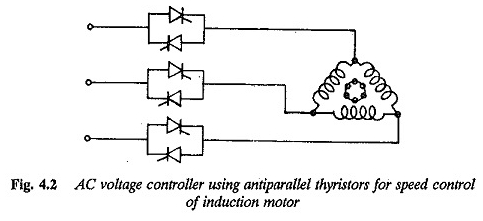
Esse método de controlar a velocidade de um mecanismo de indução é simples e econômico. O controle da tensão do estator é obtido por meio do controle de fase de tiristores antiparalelas, conectados conforme indicado na Figura 4.2.
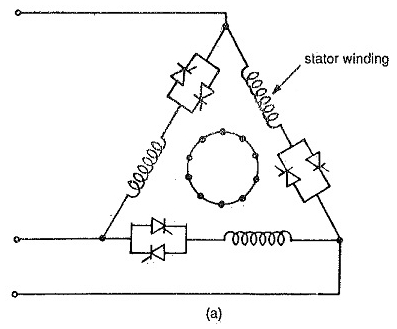
As Figuras 4.3 (a) e (b) ilustram duas conexões práticas de um controlador de tensão que fornece uma construção de um motor com indução de três fases. Em conexão com a Figura 4.2, os tiristores devem gerenciar apenas a corrente de fase. As correntes harmônicas tornam -se mais altas. Na Figura 4.3, a penalidade harmônica é bastante mais.
A tensão do estator pode variar de zero a valor total na faixa de canto do gatilho. O fator de linha no lado da linha é muito medíocre devido a harmônicos e energia reativa devido ao controle de fase.
Quando um mecanismo de indução de gaiola é alimentado a partir de uma fonte de alimentação de tensão variável para controle de velocidade, as seguintes observações podem ser feitas:
1.A velocidade de torque além do ponto máximo de torque tem uma forma negativa. Um ponto de operação estável nessa região não é possível para uma carga de torque constante.
2.O controlador de tensão deve ser capaz de suportar alto Iniciar a faixa de controle de velocidade é bastante limitada.
3. O fator de potência do motor é ruim.
Para evitar as dificuldades acima, a construção do motor de indução trifásica deve ter um rotor de alta resistência. Isso faz com que a mudança máxima de torque aponte para S = 1, reduzindo assim a região instável da curva de velocidade de velocidade.
Devido ao aumento da resistência ao rotor, a corrente de partida diminui, o fator de potência melhora e a faixa de controle de velocidade aumenta.
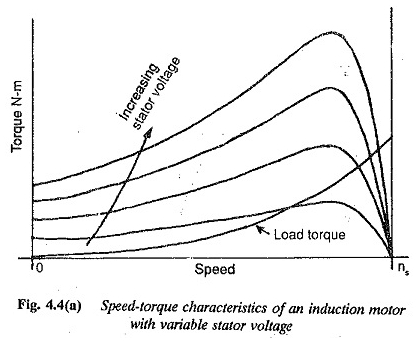
O método de controle de velocidade é, portanto, vantajoso com um rotor de alta resistência. As curvas de velocidade de torque para esse controle são representadas na Figura 4.4 (a). A nota atual do controlador decide o possível torque a cada velocidade.
A curva de limite de torque, dependendo da velocidade, pode ser derivada. A Figura 4.4 (b) mostra essa curva de torque limitada para a notação de projeto do controlador, que é três vezes a corrente do motor nominal. A corrente em função da velocidade e tensão do estator é representada.
Durante o controle, se o valor atual exceder o valor limite, o limite de corrente automático deverá ser usado. Com isso, o valor do ângulo de disparo é ajustado até que a corrente autorizada circule.
Mesmo que o método seja simples e econômico, as perdas motoras aumentam com o aumento da mudança. O aumento das perdas pode ser atribuído ao aumento da corrente do motor devido à queda no fluxo do espaço aéreo, bem como à alta resistência do rotor.
A relação R1 / R′2 pode ser considerada representativa para decidir essas perdas, porque o aumento da resistência é decisivo na limitação da corrente desenhada. A eficiência do motor pode ser dada aproximadamente por
![]()
onde S é o deslizamento do motor.
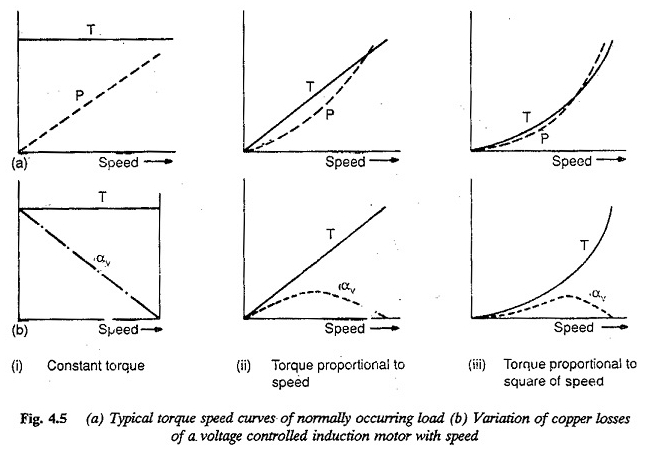
O tipo de carga acionado pelo motor influencia a corrente desenhada e as perdas do motor à medida que a mudança varia. As cobranças de execução normalmente são
1. Cargas de torque confortáveis
2.Torque Variável proporcional à velocidade
3. Totor variável proporcional ao quadrado da velocidade

Considere que as características da velocidade de carga da carga são dadas por uma equação geral
![]()
Se o valor de x = 0, é equivalente a uma carga de torque constante. X> 0 para cargas de torque variáveis (Fig. 4.5a).
Perdas de cobre do rotor
![]()
onde PD1 é a potência do espaço aéreo ou da entrada de suprimentos do rotor.

Mas o deslizamento do motor
e a entrada de energia do rotor
![]()
O valor máximo de potência transferido para o rotor é
![]()
Perdas de cobre quando expressas como o relatório PD1Max que temos
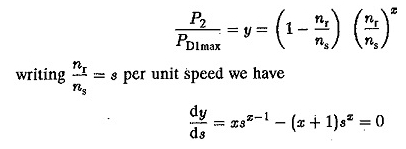
Para o valor do SAT, que é o máximo. O valor de

Para um valor máximo da perda de cobre do rotor. Os valores máximos das perdas de cobre do rotor são dados por

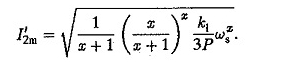
À medida que o valor de x aumenta, o valor de YM diminui. O valor máximo da corrente do rotor e a velocidade da unidade à qual ocorre também podem ser determinados. Nós temos
da qual a corrente do rotor
![]()
pela velocidade unitária para o valor máximo da corrente do rotor também é
![]()
O valor máximo da corrente do rotor pode ser determinado como
Para casos especiais
A variação nas perdas é representada na Figura 4.5 (b) para diferentes tipos de cargas. As cargas constantes de torque não são favorecidas devido ao aumento das perdas ruins com a mudança e se tornando máximo para S = 1,0.
Isso é óbvio, desde a variação do fluxo porque a tensão varia para o controle de velocidade. Para manter um torque constante, o motor atrai uma corrente pesada, o que leva a um torque / ampere ruim, baixa eficiência e um mau fator de potência em baixa velocidade.
Quando o torque varia em proporção direta para acelerar, as perdas de cobre têm um valor máximo de 25% de potência nominal a uma velocidade de 0,5 Ω.
Para casais proporcionais ao quadrado da velocidade, a velocidade unitária à qual as perdas de cobre são máximas é 2/3 e o valor máximo das perdas de cobre é de 0,149 de potência nominal.
O método de controle de velocidade pode ser usado vantajosamente para cargas de bomba ou ventilador, onde o torque é proporcional ao quadrado da velocidade.
A partir da discussão acima, esse método de controle de velocidade é adequado apenas para os seguintes casos:
1. Para operações de curto prazo, onde a duração do controle de velocidade é definida.
2. Para controlar a velocidade dos sopradores ou bombas com variações parabólicas ou cúbicas no torque com velocidade. Isso não é adequado para cargas de torque constantes devido a um aumento de perdas e aquecimento.
3. Para controlar a velocidade do motor com baixa eficiência sob operação normal.
O tipo de carga (torque, dependendo da velocidade da carga) no motor da unidade, influencia as perdas no motor. As ondas de entrada não -sussoidal causam correntes não -sinoidais que aumentam as perdas harmônicas.
Consequentemente, as perdas totais aumentam em particular em baixas velocidades e essas perdas causam o possível estreitamento do motor, ou um motor excessivamente dimensional deve ser usado quando esse método for usado.
Para as cargas do tipo sopro em que T α n2, o valor máximo da corrente ocorre a uma velocidade de 2/3 da velocidade básica. Essa corrente depende da carga completa do motor do motor. Para grandes motores deslizantes (rotores de alta resistência), a corrente máxima para a corrente nominal está diminuindo.
Para cargas constantes de torque, as perdas de energia aumentam com a redução na velocidade e atinge o valor máximo na própria velocidade zero. Para cargas com t α n, o máximo ocorre em 1/2, a velocidade básica e as perdas aumentam para 25% da potência do estator.
As perdas que ocorrem no motor são responsáveis pelo aumento da temperatura do motor. As perdas devem ser mantidas no valor autorizado para que o motor ainda funcione com um aumento de temperatura autorizado. Os diferentes tipos de cobranças discutidos tendem a aumentar as perdas motoras.
Além disso, a forma de onda da tensão de entrada é distorcida. As correntes do estator e do rotor não são sinusoidais com rico conteúdo harmônico. Esses harmônicos causam perdas adicionais. Eles podem ser considerados 50% das perdas nominais de cobre.
O aumento das perdas motoras com grandes turnos leva a um estreitamento do motor. Um motor normal pode ser liberado de 5 a 6 vezes. Se o rotor de alta resistência for usado, o fator arejado diminuirá.
O total de perdas motoras são

Ou
A FV cuida do aumento de perdas devido à distorção e é normalmente considerada 1,5.
PR é a classificação do motor
K1PR é o total da perda de cobre do motor.
Para manter o aumento da temperatura autorizada, as perdas autorizadas são

Ou
η é eficiência do motor
αV é a relação de perdas a uma velocidade mínima para observar as perdas. velocidade.
Avaliação PTVP do motor.
O fator αV depende do tipo de carga utilizada. Para máquinas resfriadas à força, é 1,0 e independente da velocidade. Se a máquina for reflexão automática, depende da velocidade. Esse valor diminui à medida que o limite inferior da velocidade diminui.
Uma característica típica para uma máquina com dois pólos é representada na Figura 4.5 (c). O estreitamento também é afetado pela eficiência do motor. À medida que a eficiência diminui 1-η / η aumenta. Para esse tipo de motor de controle de velocidade do rotor grande, 17 resistência são usadas. Eles têm baixa eficiência. Portanto, o estreitamento do motor diminui.

A discussão acima indica claramente que um determinado motor é distorcido de maneira diferente quando causa diferentes tipos de cargas.
Em outras palavras, a potência exigida pela carga é constante, o motor da unidade deve ser dimensões diferentes para diferentes tipos de curvas de velocidade de carga da carga, o exemplo, dependendo do ilustre.