Controle de frequência variável da unidade do motor de indução:
Controle de frequência variável da unidade do motor de indução – velocidade síncrona; portanto, a velocidade do motor pode ser controlada por uma frequência de potência variável. A tensão induzida no estator é proporcional ao produto da frequência de oferta e do fluxo de gap de ar.
Se a queda do estator for negligenciada, a tensão do terminal poderá ser considerada proporcional ao produto da frequência e do fluxo.
Qualquer redução na frequência da oferta, sem alteração na tensão do terminal, causa um aumento no fluxo de gap ar. Os motores de indução são projetados para operar no ponto do joelho da característica da magnetização para usar completamente o material magnético.
Portanto, o aumento do fluxo saturará o motor. Isso aumentará a corrente de magnetização, deformará a corrente e a tensão da linha, aumentará a perda do núcleo e a perda de cobre do estator e produzirá um ruído acústico na lareira alta.
Embora um aumento no fluxo além do valor avaliado seja indesejável com a consideração dos efeitos de saturação, também é evitada uma diminuição no fluxo para manter a capacidade de torque do motor.
Consequentemente, o controle da frequência variável da unidade do motor de indução abaixo da frequência nominal é geralmente realizada no fluxo nominal de gap de ar por uma tensão terminal variável com a frequência para manter a relação constante (v / f) para o valor nominal. Da equação. (6.13)
Onde k é uma constante e ls e l ‘são, respectivamente, o estator e o estator referiram as indutâncias do rotor. O sinal positivo diz respeito ao funcionamento do automóvel e o sinal negativo é para a operação de frenagem.
Quando a frequência não é baixa, (rs / f) ≪ 2π (ls + l ′ r) e, portanto, de (6,69)

A equação (6,70) sugere que, com uma razão constante (v / f), o motor desenvolve um torque máximo constante, exceto em baixa velocidade (ou frequências). O motor funciona, portanto, no modo de torque constante. De acordo com a Eq.
(6.69), para baixas frequências (ou baixas velocidades) devido à queda de resistência do estator [isto é, quando (Rs / F) não é insignificante em comparação com 2π (LS + L ′ R)] O torque máximo terá um valor mais baixo no funcionamento do motor (sinal -Eve) e maior valor no funcionamento do freio (sinal de sinal).
Esse comportamento se deve à redução do fluxo durante a operação do automóvel e ao aumento do fluxo durante o funcionamento da frenagem. Quando é necessário que o mesmo torque máximo seja mantido em baixa velocidade também na operação do automóvel, a proporção (v / f) aumenta em baixa frequência.
Isso causa um aumento adicional no torque máximo de frenagem e uma saturação considerável da máquina no funcionamento da frenagem.
Quando você tem ou atinge o valor nominal na velocidade básica, ele não pode ser aumentado com a frequência. Portanto, acima da velocidade básica, a frequência é modificada com constante v. De acordo com a Eq. (6.70), com V mantido constante, o torque máximo diminui com o aumento da frequência (ou velocidade).
A variação da tensão terminal com a frequência é, portanto, como mostrado na Figura 6.33 (a). V é mantido constante acima da velocidade básica. Abaixo da razão de velocidade básica (v / f) é mantida constante, exceto em baixa frequência, onde a razão (v / f) é aumentada para manter o torque constante máximo.
As curvas de torque correspondentes são representadas na Figura 6.33 (b) para as operações de manga e frenagem. As curvas sugerem que o controle de velocidade e a operação de frenagem estão disponíveis a uma velocidade de velocidade na velocidade da velocidade síncrona.

Um dado torque é obtido com uma corrente inferior quando a operação em qualquer frequência é limitada entre a velocidade síncrona e o ponto máximo de torque, tanto para operações de automóveis quanto para a frenagem.
Consequentemente, a operação do motor para cada frequência é limitada entre a velocidade síncrona e o ponto máximo de torque, como mostrado pelas linhas completas da Figura 6.33 (b).
O controle de frequência variável da unidade do motor de indução oferece bom desempenho operacional e transitório devido às seguintes características:
- O operação de controle de velocidade e frenagem estão disponíveis da velocidade zero à velocidade básica superior.
- Durante os transientes (Iniciar -Up, Breading e Speed Reversal), a operação pode ser realizada com torque máximo com uma corrente reduzida, o que fornece uma boa resposta dinâmica.
- As perdas de cobre são baixas e a eficiência e o fator de potência são altos porque a operação é limitada entre a velocidade síncrona e o ponto máximo de torque em todas as frequências.
- A queda na velocidade da falta de carga total é pequena.
A vantagem mais importante do controle de frequência variável do mecanismo de indução é que ele permite uma unidade variável com uma boa função operacional e desempenho de transição acima de um mecanismo de indução de gaiola de esquilo.
O mecanismo de gaiola de esquilo possui várias vantagens em comparação com um motor CC. É barato, robusto, confiável e mais durável.
Devido à ausência de um interruptor e escovas, ele praticamente não requer manutenção, pode ser explorado em um ambiente explosivo e contaminado e pode ser projetado para velocidades, tensões e dimensões de energia mais altas. Ele também possui menor inércia, volume e peso.
Embora o custo de um mecanismo de gaiola de esquilo seja muito menor em comparação com o de um motor de corrente contínua da mesma nota, o custo geral do treinamento do motor de indução do motor, em geral, é maior.
Porém, devido às vantagens listadas acima, os leitores de mecanismos de indução de frequência variáveis são preferidos aos discos do motor CC para a maioria dos aplicativos.
Em aplicações especiais que requerem operação livre de manutenção, como instalações subterrâneas e subaquáticas, bem como em aplicações envolvendo ambientes explosivos e contaminados, como nas minas e na indústria química, os leitores de motor com indução de frequência variável são uma escolha natural.
Eles têm várias outras aplicações, como tração, mesas de fábrica, siderúrgicas, bombas, ventiladores, sopradores, compressores, espinhos, transportadoras, máquinas -ferramentas etc.
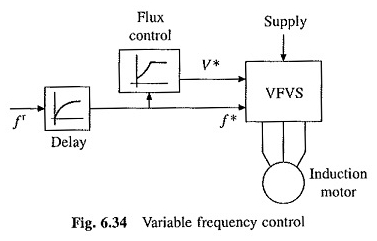
O diagrama de blocos do controle de frequência variável do esquema de condução do motor de indução é ilustrado na Figura 6.34. O motor é fornecido a partir de uma fonte de tensão variável de frequência variável (VFV). V * e F * são controles de tensão e frequência para VFVs.
O bloco de controle de fluxo produz um comando de tensão v * para VFVs para manter a relação da Figura 6.33 (a) entre v * e f *. A frequência de referência F * é modificada na velocidade de controle.
Um circuito de atraso é introduzido entre F * e FR, de modo que, mesmo quando o FT é modificado por uma grande quantidade, F * só mude lentamente para que a velocidade do motor possa seguir as alterações de FT, restringindo assim a operação do motor para cada frequência entre a velocidade síncrona e o ponto máximo de torque. Os VFVs podem ser um inversor de fonte de tensão ou um cicloconverteur.
Controle de velocidade de velocidade:
Seja V e F a tensão e frequência nominal da máquina. Quando o motor é usado abaixo da velocidade básica com um controle constante (v / f), para uma frequência, KF, a tensão terminal será KV, onde k é um fator como 0 ≤ k ≤ 1. Assim, porque a frequência aumentou de 0 para F, K passa de 0 para 1 e que a tensão altera de 0 a V.
Substituindo a tensão KV e a frequência KF e negligenciando a queda da resistência do estator, Equações (6.4) e (6.10)
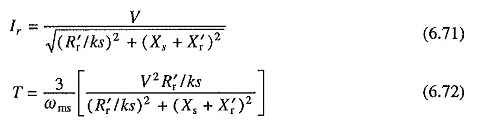
Em equações. (6.71) e (6.72) se (ks) for mantido constante porque k é variado, então a corrente do rotor e o casal t permanecerá constante. Como a mudança é pequena, o R estará alinhado com a tensão. Como o fluxo é constante, o IM também será constante. AGORA
![]()
Assim, se a operação do motor for realizada em um valor constante de Ks, pois a frequência é variada, o motor operará em uma corrente constante e um torque. Vamos examinar o significado de Ks.
Na frequência KF
Nota ωst é a velocidade de deslizamento, que é a diferença nos kωms da velocidade do campo rotativo e na velocidade do rotor ωm. É também a queda na velocidade do motor de sua carga sem carga, quando a máquina é carregada.
A discussão acima mostra. Para qualquer valor de t, a queda na velocidade do motor a partir de sua velocidade de carga (kΩMS) é a mesma para todas as frequências. Portanto, as características do torque de velocidade da máquina para 0
O funcionamento da máquina a uma velocidade de deslizamento constante também envolve operação em uma frequência constante do rotor, conforme indicado abaixo

onde FR e ωr são respectivamente a frequência do rotor em Hz e Rad / s.
Para s> (xs + x′r), portanto, a partir das equações. (6.72) e (6,73)

Eqn. (6.76) sugere que para s
Dependendo da discussão acima, para uma velocidade deslizante, a corrente do motor e o torque têm os mesmos valores em todas as frequências. Assim, a corrente do motor e o torque podem ser controlados controlando a velocidade de deslizamento.
Além disso, a corrente do motor pode ser limitada dentro de um limite de segurança limitando a velocidade de deslizamento. Esse comportamento é usado em um controle de velocidade de loop fechado para limitar a corrente dentro de um limite autorizado.
Em seguida, vamos considerar a operação acima da velocidade básica. Como indicado anteriormente, a máquina opera em uma tensão constante V. Agora

Como a frequência é maior que a nota k> 1. Como a operação é novamente limitada entre a velocidade síncrona e o torque máximo, a mudança tem um pequeno valor, portanto

Assim, para velocidades acima da velocidade básica, para um dado e, portanto, aproximadamente a uma doação, a velocidade de deslizamento ωsl aumenta linearmente com k (ou frequência). Esse comportamento é usado em um controle de velocidade de loop fechado para limitar a corrente no valor autorizado acima da velocidade básica.
Como a mudança é pequena, o R está alinhado com V. Se a perda da máquina da máquina for negligenciada, o poder desenvolvido é dado por
![]()
Portanto, o PM é constante para um dado e, portanto, para um IS. O leitor, portanto, funciona no modo de energia constante.
Torque e limitações de potência e modos de operação:
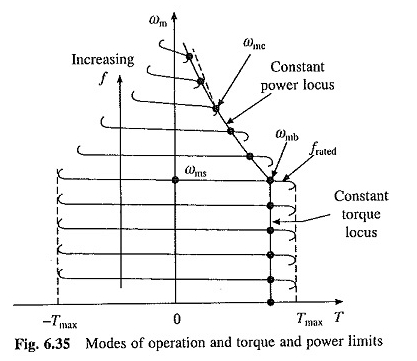
Variações no torque e potência para uma determinada corrente do estator e para frequências abaixo e acima da frequência nominal são representadas por pontos na Figura 6.35.
Quando a corrente do estator possui o valor máximo autorizado, isso representa o torque máximo e as capacidades de suprimento do motor no controle de frequência variável da unidade do motor de indução.
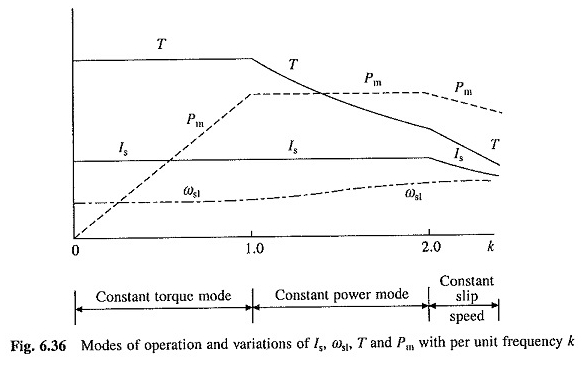
A variação nas capacidades máximas de torque e potência com frequência é representada na Figura 6.36. A variação na velocidade de deslizamento ωsl com a frequência também é representada nesta figura.
Conforme mostrado na Fig. 6.35 e 6.36, o motor possui um torque máximo constante de zero a velocidade básica ωmm, para que o leitor trabalhe no modo de torque constante. Nesta faixa de frequência, V é modificado com a frequência, como mostrado na FIG.
6.33 (a) e a velocidade da corrente máxima autorizada permanece constante. Da velocidade à velocidade básica ωMC, a potência máxima possui um valor constante; portanto, o motor funciona no modo de energia constante. Na velocidade ωmc (Fig. 6.35), o torque de falha é atingido.
Qualquer tentativa de operar o motor na corrente máxima autorizada além dessa velocidade manterá o motor. Consequentemente, além da velocidade ωMC, a máquina opera a uma velocidade de deslizamento constante e a corrente máxima autorizada e a potência máxima podem diminuir (Fig. 6.36).
Agora, a corrente do motor reduz inversamente com velocidade e torque diminui inversamente, pois a velocidade é quadrada. A operação nessa região é necessária nos discos que exigem uma ampla faixa de velocidade, mas um torque baixo em alta velocidade.
Por exemplo, em aplicações de tração, o leitor funciona nessa região quando funciona a toda velocidade, porque o torque necessário no equilíbrio de alta velocidade é muito baixo em comparação com seu valor durante a aceleração.