Controle de velocidade no loop fechado do treinamento de motores de indução:
Um controle de velocidade de loop fechado do treinamento do motor de indução é ilustrado na Figura 6.43. Ele usa um loop de velocidade interna com um limitador deslizante e um loop de velocidade externo. Como para uma determinada corrente, a velocidade de deslizamento tem um valor fixo, o loop de velocidade deslizante também funciona como um loop de corrente interna.
Além disso, também garante que a operação do motor sempre ocorra por parte da curva de velocidade de velocidade entre a velocidade síncrona e a velocidade máxima de torque para todas as frequências, garantindo assim uma alta relação torque / corrente.
O leitor usa um inversor PWM nutrido de uma fonte CC, que possui capacidades regenerativas de frenagem e operação com quatro quadrantes. O esquema de acionamento é, no entanto, aplicável a qualquer jogador de VSI ou Cycloconverter com capacidade de frenagem regenerativa ou dinâmica. A operação do leitor é explicada abaixo.
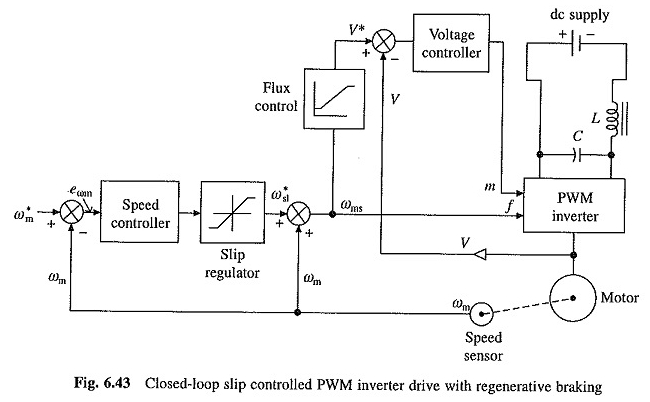
O erro de velocidade é processado por meio de um controlador PI e um regulador deslizante. O controlador PI é usado para obter boa precisão no estado de equilíbrio e aliviar o ruído.
O regulador deslizante define o controle de velocidade deslizante ω * SL, cujo valor máximo é limitado para limitar a corrente do inversor a um valor autorizado. A velocidade síncrona, obtida adicionando a velocidade real ωm e a velocidade de deslizamento ω * SL, determina a frequência do inversor.
O sinal de referência para o controle de velocidade de loop fechado do mecanismo de indução da tensão do terminal V * da máquina é gerado a partir da frequência f usando um gerador de função.
Quase garante uma operação de fluxo constante para a velocidade básica e a operação em uma tensão terminal constante acima da velocidade básica.
Um aumento nas etapas do controle de velocidade ω * M produz um erro de velocidade positivo. O controle de velocidade deslizante ω * SL é definido no valor máximo.
O leitor acelera a corrente máxima do inversor autorizado, produzindo o torque máximo disponível, até que o erro de velocidade seja reduzido a um pequeno valor. O leitor finalmente se deforma a uma velocidade deslizante para a qual o torque do motor equilibra o torque de carregamento.
Uma diminuição no controle de velocidade produz um erro de velocidade negativo. O comando de velocidade de deslizamento é definido no valor negativo máximo.
O leitor é quebrado sob frenagem regenerativa, corrente máxima autorizada e o torque de frenagem máximo disponível, até que o erro de velocidade seja reduzido a um pequeno valor.
Agora, a operação se move para a automobilização e o leitor é ajustado na velocidade de deslizamento para a qual o torque do motor é igual ao torque de carga.
O leitor tem uma resposta rápida porque o erro de velocidade é corrigido para o torque máximo disponível. O controle de deslizamento direto garante operação estável em todas as condições operacionais.
Para operação além da velocidade básica, o limite de velocidade deslizante do regulador deslizante deve ser aumentado linearmente com a frequência até que o valor de distribuição seja atingido.
Isso é realizado adicionando à saída do regulador deslizante um sinal de velocidade deslizante adicional, proporcional à frequência e de um sinal apropriado.
Para frequências acima da frequência para a qual o torque de falha é atingido, o limite de velocidade deslizante é mantido fixo próximo ao valor de quebra.
Quando uma resposta rápida é necessária, o deslizamento máximo pode ser igual ao pecado, pois os motores de indução podem ser autorizados a transportar a corrente nominal várias vezes durante operações de transição a curto prazo.
O inversor e seu conversor frontal são construídos usando dispositivos semicondutores cujas dimensões de dieta transitória e permanente são as mesmas. Em seguida, as notas do inversor e do conversor frontal devem ser escolhidas várias vezes a corrente do motor.
Isso aumentará consideravelmente o custo de variação. Quando uma resposta de transição rápida não é necessária, o inversor e as correntes do conversor frontal podem ser escolhidas como um pouco mais altas que as do motor.