Controle de vetores do motor de indução:
A única idéia por trás do controle vetorial do mecanismo de indução é ter um leitor elétrico que deve oferecer maior desempenho que o mecanismo CC excitou separadamente amplamente usado no setor.
Além disso, esse leitor também deve emergir como uma alternativa robusta e confiável, sem manutenção e mais barato do jogador do CC. Alguns anos atrás, o mecanismo DC excitado separadamente foi considerado um cavalo de batalha principal na indústria.
Isso se deve ao seu desempenho dinâmico mais rápido em comparação com o mecanismo de indução. A resposta dinâmica mais rápida do motor CC está em seu motor duplamente nutrido com uma instalação inerente a um controle de torque e fluxo no motor.
Antes da introdução do controle vetorial do mecanismo de indução, os métodos que desfrutavam de ampla aceitabilidade no controle da direção do mecanismo de indução da gaiola são chamados de controle de tensão, controle de frequência, controle de resistência ao rotor, controle V / F, controle de fluxo, controle deslizante, controle de recuperação da potência deslizante, etc.
Todos esses métodos de controle são qualificados como um controle escalar de um mecanismo de indução e, com eles, o mecanismo de gaiola tem menor desempenho dinâmico em comparação com o motor excitado separadamente.
Em seus esforços para ter um leitor de AC com manutenção, robusto e de alto desempenho, o pesquisador queria alcançar o desempenho e aprimorar as características do motor CC separadamente com um mecanismo de indução com um rotor de gaiola.
Nesse sentido, Blaschke introduziu o conceito de controle vetorial do mecanismo de indução. Blaschke, em 1972, introduziu o princípio de orientação no solo para realizar as características do motor DC em uma unidade de motor de indução.
Para a mesma coisa, ele usou o controle dissociado do torque e o fluxo no motor e deu seu nome como controle do transvetor.
O leitor de mecanismo de indução da gaiola com controle ou controle orientado para o campo oferece um alto nível de desempenho dinâmico e controle de malha fechada associada a este leitor, oferece a estabilidade a longo prazo do sistema.
Embora não haja grande diferença entre os controles escalares e vetores, este último possui certas propriedades que o tornam favorável como um sistema de controle com alto desempenho dinâmico.
O controle vetorial também é chamado de controle independente ou desacoplado, no qual os vetores de corrente de torque e fluxo são verificados.
É um fato bem estabelecido que, no modo de controle vetorial, o leitor de mecanismo de gaiola é linearizado e que se comporta como um mecanismo de corrente contínua completamente compensada, no qual o controle da corrente de reforço afeta diretamente o torque eletromagnético desenvolvido pelo leitor.
Da mesma forma, no motor da gaiola, o método de controle vetorial, as duas correntes de quadratura responsáveis pela produção e torque de fluxo, respectivamente, são controladas independentemente e a resposta do componente atual do produtor de torque é muito rápida, fornecendo assim um controle de torque mais rápido e, portanto, o leitor tem um alto nível de desempenho dinâmico.
Em um sentido amplo, o controle do mecanismo de indução da gaiola, pois ele se comporta como um mecanismo de corrente contínua completamente compensado é conhecido como seu vetor.
Nesse caso, as correntes do estator são expressas em referência a uma estrutura de coordenadas que é executada em sincronismo com o vetor de estator ou rotor MMF.
As correntes do estator expressas nessas coordenadas são resolvidas em dois componentes ortogonais que produzem o fluxo e o torque no motor. Estes são semelhantes ao motor de corrente contínua no qual o torque e o fluxo são controlados pelo controle de independentemente os quadros de reforço e campo.
Para controlar o torque e o fluxo (assim a velocidade) independentemente no mecanismo de indução, é necessário controlar a amplitude e a fase das três correntes do estator (IAS, IBS, ICS) através de um inversor rápido.
Para esse fim, normalmente é usado um CC-TVSI (inversor da fonte de tensão atual). Esse algoritmo de controle estaria muito envolvido.
O uso é feito de transformação de três a duas fases (uma operação de matriz bem conhecida). As correntes de duas fases, os IDs e os QIs em quadratura de fase requerem o controle das duas amplitudes e uma fase que é realizada pelo controle do vetor.
O controle vetorial do método do motor de indução é a forma do diagrama de blocos é ilustrado na Figura 11.63 Alguns estágios cruciais são os seguintes.
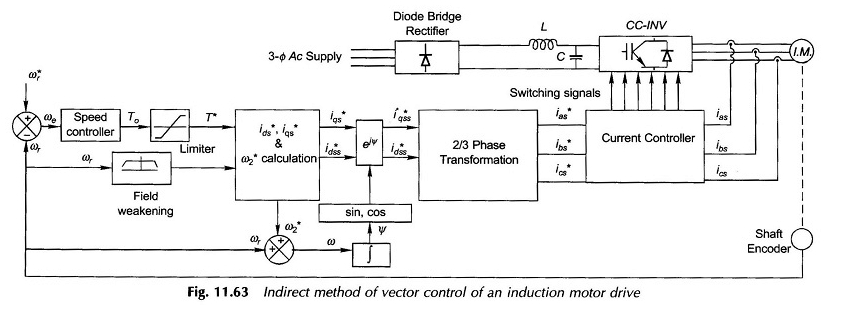
A partir do sinal de velocidade do motor (ωR) e da velocidade desejada (ω * r), o erro ωe é determinado. O controlador de velocidade calcula o torque do motor (para) necessário para corrigir a velocidade que passa por um limitador para determinar o sinal de torque t *.
Em um bloco de campo paralelo, um bloco de enfraquecimento, a velocidade do motor ωr gera outro sinal.
Esses dois sinais são usados para calcular os i * ds e i * qs (correntes de quadratura ideais) e uma correção de velocidade ω * 2.
Ω = ωr + ω * r é integrado, que é então usado para encontrar a transformação EJψ. Essa transformação realizada (i * ds, i * qs) fornece o último conjunto ideal (i * dss, i * qss).
A transformação da fase 2/3 em (i * dss, i * qss) fornece a corrente do estator ideal (i * como, i * bs, i * cs).
As correntes do estator medidas (IAS, IBS, ICS) são comparadas a (i * como, i * bs, i * cs) pelo controlador atual e os seis sinais geraram controle as correntes alimentadas pelo mecanismo de indução.
O exposto acima é uma explicação simplificada do algoritmo de controle vetorial para o controle do mecanismo de indução.
No controle do vetor do motor de indução, o fluxo do rotor é regulado controlando a corrente de enrolamento do estator. Para regular o fluxo do rotor, o conhecimento de sua posição também é desejado. A posição do fluxo do rotor é detectada ou estimada.
Consequentemente, de acordo com as metodologias adotadas para avaliar a posição do vetor de fluxo do rotor, o controle do vetor é chamado de controle de vetor direto ou controle de vetor indiretos.