Controle orientado para o motor de indução: mecanismo de indução:
Nos discos controlados deslizantes usando VSI ou CSI discutidos em seções anteriores, a tensão do estator ou a corrente do estator é controlada usando a frequência de deslizamento. Eles são controlados apenas em amplitude.
O controle da corrente do estator não suporta sua posição de fase em comparação com o fluxo. O controle não fornece comportamento dinâmico satisfatório. Há uma resposta oscilatória a alterações na frequência do rotor.
A resposta dinâmica pode ser melhorada usando o princípio de controle orientado no solo do mecanismo de indução, onde a corrente do estator é controlada tanto em amplitude quanto na posição da fase em comparação com o fluxo.
No controle do solo do motor de indução, a corrente do estator tem a função de fornecer fluxo e torque.
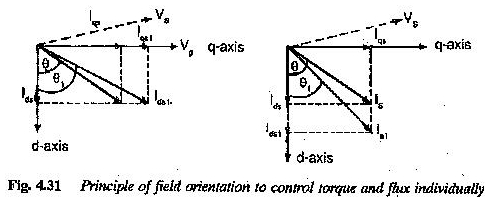
O mecanismo de indução terá uma operação semelhante à de um mecanismo de se o estator dos componentes da corrente, a saber, a produção de fluxo e a produção de torque são controlados separadamente (Fig. 4.31).
Na verdade, esse é o caso em um motor de corrente contínua, onde o torque depende da corrente de reforço e do fluxo na corrente do campo. Há uma dissociação inerente entre eles, mas para os efeitos da reação do quadro.
Esses efeitos podem ser eliminados compensando os enrolamentos e há uma dissociação perfeita em um motor CC excitado separadamente. Esse tipo de dissociação é tentado no controle de motores de indução. O princípio é chamado de orientação no solo ou controle do vetor.
Esse controle melhora o desempenho dinâmico do leitor em todas as velocidades. A corrente do estator é dividida em dois componentes, um ao longo do eixo D e o outro ao longo do eixo Q.
Os eixos de referência foram escolhidos de tal maneira que o fluxo do rotor está completamente disponível ao longo do eixo direto. Seu componente de quadratura é zero.
Assim, o componente da corrente ao longo do eixo D é o produtor de fluxo componente e que ao longo do eixo q é o componente do produtor de torque. Ao variar esses componentes de forma independente, podemos ter um controle independente do fluxo e o controle de um casal. Estes são representados na FIG.
4.31 (a) e (b). No primeiro, a variação do fluxo é indicada por um componente de eixo direto variável da corrente, enquanto no segundo a variação do componente do eixo Q do estator é representado.
Consequentemente, o controle da corrente do estator é equivalente não apenas à variação em sua magnitude, mas também ao seu ângulo de fase. O método é, portanto, chamado de controle vetorial.
As técnicas de controle de vetores usadas para manter o fluxo de espaço de ar constantes fornecem características dinâmicas ruins ao treinamento, pois o torque segue a frequência de deslizamento com um atraso. Técnicas foram desenvolvidas para manter o fluxo da constante do rotor.
Nesses métodos, o casal segue sem demora, melhorando assim o comportamento dinâmico. Uma dinâmica também de alta qualidade é necessária para o controle orientado no solo do mecanismo de indução usado como atuador.
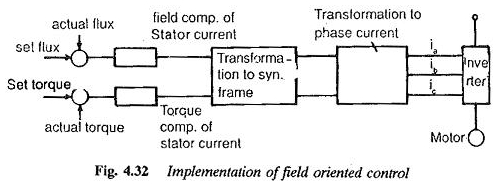
A Figura 4.32 ilustra a implementação do princípio da orientação no solo. O valor real do fluxo do rotor é comparado ao valor de referência e o erro assim obtido é usado para controlar o componente do eixo direto da corrente.
Normalmente, esse componente é mantido constante para que o fluxo do rotor seja constante. O componente do eixo quadratura é controlado usando o sinal de erro obtido a partir da comparação do torque real e do torque de referência. Os componentes estão na estrutura rotativa de maneira síncrona.
Consequentemente, a dissociação entre os componentes da produção de fluxos e a produção de torque do reforço requer um sistema de coordenadas de referência e a transformação das quantidades nesse quadro de referência e, finalmente, dentro da estrutura do estator,
Nesse controle, que fornece um comportamento dinâmico muito bom sem um golpe de casal de transição, é necessário um fluxo secundário, que pode ser disponibilizado de duas maneiras:
1. Usando diretamente as bobinas de detecção de fluxo.
2. Estimativa indireta do fluxo usando um modelo de máquina, usando quantidades terminais facilmente mensuráveis, como tensões e correntes.
O primeiro método usando medição direta fornece bons resultados e é provavelmente o método de controle mais preciso disponível. A medição é realizada por meio de bobinas de pesquisa, sondas de salão ou qualquer outra técnica para medir o fluxo.
O fluxo medido é usado para fazer a dissociação limpa entre os componentes da produção de torque e a produção do fluxo de corrente do estator. O método é essencialmente insensível a variações nos parâmetros. No entanto, o mecanismo de gaiola perde sua robustez e sua simplicidade de construção.
Se tentarmos manter a robustez e a simplicidade do motor, o fluxo será obtido usando o segundo método. O fluxo do rotor é estimado a partir do vetor de tensão do estator, do vetor atual e da velocidade do rotor. Esse fluxo estimado é alimentado com o controlador de torque.
Essa abordagem é sensível a erros em parâmetros. A resistência ao rotor, vazamentos e outros parâmetros devem ser determinados com precisão para obter um desempenho equivalente à medição direta.
Infelizmente, os parâmetros do motor usados no cálculo são determinados a partir de testes de vácuo e não representam os valores dos parâmetros realmente presentes no ponto de operação.
Além disso, esses parâmetros variam consideravelmente com saturação, temperatura, frequência e amplitude da corrente. O nível de fluxo secundário pode ser modificado pela variação nos parâmetros. Essas variações nos parâmetros causam controle de fluxo errônea, que deteriora o desempenho dinâmico.
Para evitar erros devido à variação nos valores dos parâmetros (principalmente resistência ao rotor), devido a uma estimativa incorreta ou devido a condições de operação do motor, foi utilizada a identificação ou adaptação dos parâmetros automáticos.
Os métodos identificam as alterações no desempenho devido à variação dos parâmetros e corrigem os parâmetros de acordo.
O erro entre o valor estimado do fluxo e o fluxo desejado no motor é usado para corrigir o parâmetro mais influente, que é a resistência ao rotor ou a constante de tempo do rotor, para que o modelo da máquina forneça o valor necessário do fluxo sem nenhum erro.
Outro método discutido recentemente é uma técnica on -line para estabelecer o valor exato da resistência ao rotor do mecanismo de indução. A identificação é obtida injetando uma corrente de sequência negativa e detectando a tensão da sequência negativa.
O valor da resistência ao rotor é calculado usando informações. O controle orientado no solo do motor de indução corrige o valor da resistência ao rotor sem a necessidade de um sensor térmico.
Os métodos do feedback dos observadores do estado também são usados para a identificação de parâmetros.
Com o advento de microprocessadores (μPs) e microcomputadores, agora é possível resolver efetivamente os problemas vinculados a discos com o sistema de treinamento. O vetor de fluxo pode ser facilmente determinado.
Para realizar a correspondência do modelo do motor e a identificação dos parâmetros do rotor por um procedimento de correlação, os μps podem ser muito eficazes sem uma medida adicional.
Os μPs também facilitam a implementação de algoritmos sofisticados para gerar sequências de tiro no inversor.
Além disso, o processo desenvolvido no controle orientado ao campo do sistema geral de treinamento tornou -se economicamente viável, pois o hardware caro usado até agora pode ser substituído pelo software.
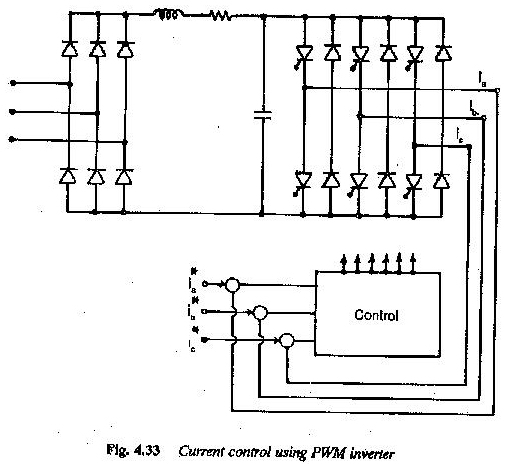
A orientação do campo pode ser facilmente implementada com o CSI alimentando um controle orientado para o motor do mecanismo de indução. Como o inversor do PWM tem um bom comportamento dinâmico, eles são usados com um controle atual na lateral da saída.
A Figura 4.33 ilustra o princípio do controle atual usando o inversor PWM. Isso tem as vantagens do VSI e do CSI.
Motociclistas de indução no modo de fluxo do fluxo:
No caso de motores de corrente contínua, as velocidades acima da velocidade básica são obtidas reduzindo a corrente do campo para uma tensão de integração constante. O casal desenvolveu diminuições. Um modo de energia constante pode ser realizado nessa faixa de velocidade e é chamado de fluxo do fluxo.
Comportamento semelhante pode ser observado no caso de motores de indução. A tensão atinge seu valor nominal para a frequência nominal. Para frequências acima desse valor, a tensão do tensionador é mantida constante. A velocidade do motor aumenta proporcionalmente à frequência.
Devido ao aumento da frequência, o fluxo do espaço aéreo diminui. O torque em uma determinada frequência do rotor é inversamente proporcional ao quadrado da frequência do estator e a potência desenvolvida não é constante. O comportamento dinâmico sob condições de fluxo enfraquecido é muito ruim. Isso pode ser melhorado por uma frequência de deslizamento variável para o torque máximo proporcional à frequência.
Um motor com uma fonte de alimentação atual tem um bom comportamento dinâmico quando há uma tensão de reserva no inversor.
Uma vez atingido um certo valor de frequência mais alto, o EMF traseiro do motor é igual à tensão aplicada e não há tensão de reserva para o controle de corrente.
O valor real do fluxo do estator e do rotor foge dos valores desejados e o leitor tem um mau comportamento dinâmico. Melhorar o desempenho dinâmico do motor no modo de enfraquecimento da terra é um problema de interesse.
Isso pode ser feito controlando a amplitude do fluxo do rotor e, portanto, o EMF traseiro, para que uma reserva de tensão suficiente esteja disponível na faixa de velocidade acima da velocidade básica. Aqui também, métodos diretos e indiretos de controle de fluxo podem ser usados.