Parte -Controle orientado para o mecanismo de indução de três fases:
A corrente do estator de um mecanismo de indução possui as funções de produção do fluxo de espaço aéreo necessário (magnetização), além de desenvolver o torque necessário para causar a carga.
Um controle controlado do mecanismo de indução de três fases terá sua operação semelhante à de um motor de corrente contínua se os componentes da corrente do estator (ou seja, a produção de fluxo e a produção de torque) puderem ser controlados separadamente.
Esse tipo de controle é possível em um mecanismo CC excitado separadamente, onde o torque e o fluxo podem ser controlados separadamente e independentemente, variando o reforço e a corrente de campo, respectivamente.
Existiria uma dissociação inerente entre eles, mas para os efeitos da reação do reforço. Esses efeitos podem ser eliminados por compensação pelo reforço. Um desacoplamento perfeito pode ser obtido em um mecanismo CC excitado separadamente.
Esse controle versátil fornece um comportamento dinâmico muito bom a um motor de corrente contínua. Assim, uma unidade de alto desempenho usando um controle do motor de indução de três fases é obtida tentando dissociar os componentes da corrente do estator.
Esse princípio é chamado de controle da orientação do campo ou controle do vetor. Esse controle melhora o comportamento dinâmico e o treinamento de desempenho muito bom pode ser obtido mesmo em baixa velocidade.
Os dois componentes da corrente são identificados e são orientados adequadamente nas ordens ortogonais em comparação com o vetor de fluxo.
Os componentes atuais podem ser orientados em relação a um dos três fluxos, a saber, o fluxo do estator, o fluxo do espaço do ar ou o fluxo do rotor.
A análise mostra que o desempenho dinâmico do leitor não está no nível desejado se a orientação for realizada em comparação com o estator ou o fluxo do espaço de ar. Esse mau comportamento dinâmico decorre do atraso do casal seguindo o turno.
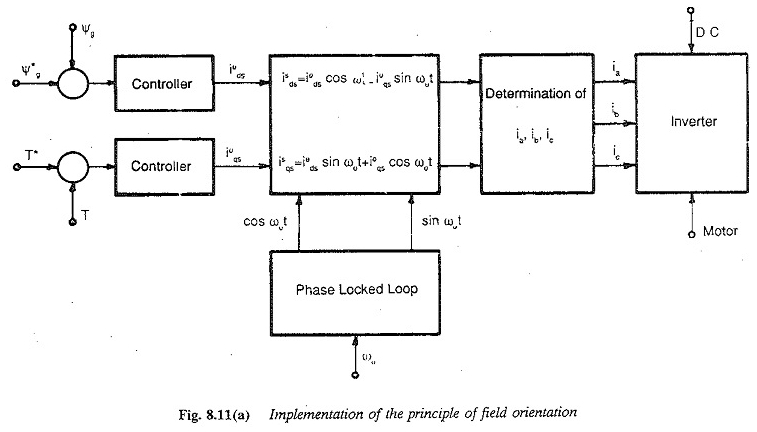
É possível uma dissociação natural e eficaz se a orientação for realizada em comparação com o fluxo do rotor, isso leva a um controle de torque de alto desempenho da direção com uma resposta muito rápida. A implementação do princípio da orientação no solo é ilustrada na Figura 8.11.
 Quando o princípio da orientação de campo foi sugerido, ele não recebeu a atenção da indústria e não era muito popular devido a equipamentos complicados. Com os desenvolvimentos em componentes digitais e microprocessadores através do LSI e a miniaturização de componentes, esse controle de alto desempenho do controle do mecanismo de indução das três fases se torna popular. Um campo principal de aplicação e uso eficaz de microprocessadores de alta velocidade é o controle vetorial do controle controlado no mecanismo de indução de três fases. Esse controle requer
Quando o princípio da orientação de campo foi sugerido, ele não recebeu a atenção da indústria e não era muito popular devido a equipamentos complicados. Com os desenvolvimentos em componentes digitais e microprocessadores através do LSI e a miniaturização de componentes, esse controle de alto desempenho do controle do mecanismo de indução das três fases se torna popular. Um campo principal de aplicação e uso eficaz de microprocessadores de alta velocidade é o controle vetorial do controle controlado no mecanismo de indução de três fases. Esse controle requer
- Informações exatas sobre o fluxo do rotor.
- O ajuste preciso dos componentes da corrente do estator em função da referência.
As funções de um microprocessador no controle vetorial do mecanismo de indução são as seguintes:
- Tratamento de sinais obtidos do codificador da árvore para determinar a velocidade do rotor e também o ângulo do rotor. Este ângulo do rotor deve ser usado em transformações de um quadro para outro.
- A estimativa de fluxo usando tensões, correntes e velocidade terminais, dependendo de um dos modelos da máquina.
- Cálculos em relação às transformações de fase e coordenadas para identificar os dois componentes da corrente. Após o controle necessário, esses componentes devem ser transformados para fornecer os valores de referência para comparação com correntes de fase reais.
- Velocidade e loops de corrente no controle de feedback. A implementação de controladores nesses loops.
- Para produzir sinais de grade para o conversor do lado da máquina e o lado da linha, o conversor do lado da máquina decide a frequência enquanto o lado da linha decide a corrente / tensão. Os sinais de disparo para o conversor da linha lateral são obtidos da mesma maneira que descrito para um conversor duplo. Os sinais de tiro no conversor do lado da máquina decidem a frequência. A velocidade de controle orientada no campo do mecanismo de indução de três fases é adicionada à saída do controlador deslizante para decidir a frequência da saída do inversor. A adição deve ser precisa porque uma grande quantidade é adicionada a uma pequena. A adição digital a um microprocessador é precisa. O microprocessador deve, portanto, poder fornecer ou gerar sinais de disparo para o conversor do lado da máquina.
- Aquisição de dados O microprocessador deve adquirir sinais de feedback em formato digital. É necessária uma transferência de dados para o processador. É necessário um fluxo de dados do processador e do processador.
- Limitando as funções lineares Controle as variáveis usadas no comportamento de controle, bem como no comportamento não linear do conversor durante a condução descontínua. Compensação para ganho variável durante modos descontínuos de condução e enfraquecimento do campo.
As operações matemáticas incluem multiplicação, divisão, adição e subtração. A unidade de processamento aritmético do microprocessador deve ser capaz de realizar essas operações.
A estimativa de fluxo pode ser realizada por integração digital usando a regra Simpson bem conhecida ou a regra trapezoidal. Mas os resultados sofrem de uma perda de precisão devido a erros de truncamento em oito processadores de bits. Esses erros levam à instabilidade das operações.
Use I do comando flutuante com dupla precisão melhora o desempenho do processador. No entanto, isso requer um longo período de cálculo. Para reduzir a carga do microprocessador, a estimativa de fluxo pode ser levada por modelos analógicos externos ao processador.
O fluxo calculado pode ser tratado no processador. Os valores de referência de correntes e fluxos são desenvolvidos pelo processador.
Dependendo da velocidade do processador e de sua capacidade de cumprir as funções acima, uma borda pode ser estabelecida entre o equipamento local e o microprocessador, para cumprir as funções.
Às vezes, o controle multi -processador pode ser realizado, dependendo da velocidade e da qualidade do controle necessário.
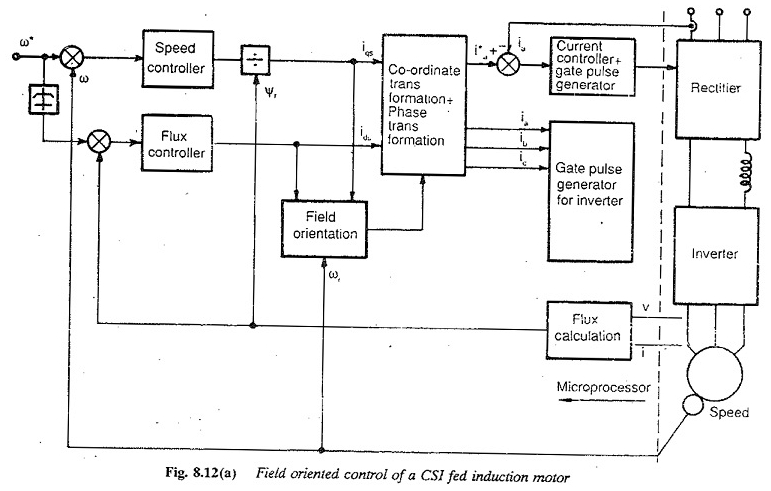
A orientação no solo é possível com o inversor da fonte de tensão, bem como o controle da fonte atual da fonte atual fornecida pelo campo do mecanismo de indução de três fases. O inversor de origem atual é amplamente utilizado devido à simplicidade de seu circuito de potência.
As características do controle orientado ao controle usando CSI são discutidas aqui (8.12 (a)). Às vezes, um inversor PWM pode ser controlado adequadamente para fornecer correntes de referência (Fig. 8.12 (b)). Esse controle pode ser realizado usando um microprocessador.

O fluxo pode ser medido diretamente usando bobinas de pesquisa ou sondas de salão. Os sinais analógicos são convertidos em digital para se nutrir no microprocessador para o tratamento subsequente.
Essa medida direta, mesmo que teoricamente exata, possui as seguintes limitações ou dificuldades: a presença de sondas ou bobinas de pesquisa sensíveis torna o motor de indução mais sensível, mas sua robustez inerente é perdida.
O sinal medido é sobreposto por harmônicos de fenda que exigem filtragem. Ajudar os erros de medição e conversão a tornar os resultados não muito confiáveis. Portanto, normalmente, o cálculo FLWC usando modelos de máquina é usado (estimativa indireta).
Esses modelos de máquinas para calcular o fluxo usam o controle orientado no solo dos parâmetros do motor de indução de três fases determinados a partir de testes de rotor sem carga e bloqueados. Imprecisão; Entre os modelos na estimativa de parâmetros, a variação da máquina!
Os parâmetros devido à temperatura e saturação devem ser levados exatamente em consideração na estimativa. A precisão é alterada em caso de integração envolvida na estimativa. Isso acontece se a tensão e a velocidade forem usadas no cálculo.
Em baixa velocidade, a integração introduz erros consideráveis nesses erros e desempenho confiável pode ser feito em uma ampla gama de paradas na parada.
Para melhorar o desempenho, as configurações da máquina usadas no modelo devem ser o mais precisas possível. Caso contrário, eles podem ser corrigidos usando um processo de correção, para que o acoplamento exato seja possível. O processo de correção melhora o parâmetro.
Estimando o fluxo indireto, bem como a identificação ou adaptação conhecida como parâmetros, são usados para obter um mecanismo de indução com acoplamento perfeito.
O fluxo estimado das variáveis reais detectadas da corrente e da velocidade com os parâmetros é comparado ao valor de referência (determinado a partir das quantidades de referência). A diferença é usada para corrigir os parâmetros da máquina que entra nos cálculos.
O parâmetro mais influente é a resistência ao rotor ou a constante do tempo do rotor e é corrigida até que o valor necessário do fluxo seja dado pelo modelo.
A única solução para o controle orientado para o campo com a adaptação dos parâmetros é o uso de microprocessadores ou microcomputadores. Várias técnicas estão disponíveis na literatura para adaptar parâmetros. Esse diagrama é ilustrado na Figura 8.13.
O microprocessador deve realizar operações matemáticas para estimar o fluxo de valores de referência e variáveis medidas.

Selecionar um microprocessador para o aplicativo acima pode ser baseado nas seguintes considerações:
- Resolução do prêmio para o retificador controlado em fase. A resolução decide sobre assimetria no tiroteio.
- Operações matemáticas que podem ser realizadas. Deve ser capaz de aritmética binária e decimal, incluindo multiplicação e divisão
- A capacidade de memória necessária
- Geração interna do relógio
- Gerenciamento de software para a implementação de controladores, limitadores, etc.
- Capacidade de interrupção
Algumas outras aplicações de um microprocessador no controle dos mecanismos de indução são:
- Um microprocessador pode ser usado para co -seleção de velocidade usando um controlador de tensão
- Pode ser usado para controlar a velocidade usando o esquema de recuperação de energia deslizante. O controle de verctors também pode ser usado aqui.
- Ele pode ser usado para o leitor controlado controlado com o controle de fluxo e torque no treinamento do CSI do Fed.
- Pode ser usado para implementar técnicas de PWM para controlar a tensão e os harmônicos nos motores de indução VSI e CSI.
- Pode ser usado para controlar o cicloconverteur.