Projeto de esquema de recuperação de energia usado no mecanismo de indução:
Diagrama de recuperação de potência deslizante usado no motor de indução – A Figura 6.53 mostra um circuito equivalente de um motor de indução do rotor da ferida com uma VR de tensão injetada em seu rotor, assumindo que a proporção do estator -rotor de voltas. Quando a perda de cobre do rotor é negligenciada
![]()
onde PR é o poder absorvido pela fonte VR. A amplitude e o sinal de PR podem ser controlados controlando a magnitude e a fase VR. Quando o PR é zero, o motor opera com sua característica de torque de velocidade natural.
Um PR positivo reduzirá a PMS e, portanto, o motor operará a uma velocidade mais baixa para o mesmo torque. Quando o PR é igual a PG, PM e, portanto, a velocidade será zero. Assim, a variação do PR de 0 a PG permitirá a velocidade da velocidade síncrona a uma velocidade zero. A polaridade do VR para esta operação é representada na Figura 6.53 por uma linha contínua.
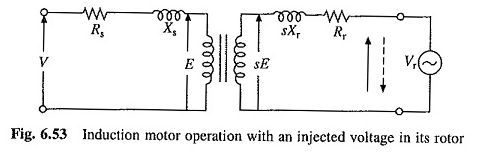
Quando o PR é negativo, o IE VR atua como uma fonte de energia, o PM será maior que o PG e o motor operará a uma velocidade maior que a velocidade síncrona. A polaridade do VR para controle de velocidade acima da velocidade síncrona é representada por uma linha pontilhada na Figura 6.53.
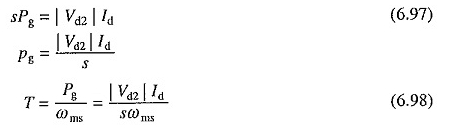
Quando a perda de cobre do rotor é negligenciada, o PR é igual ao esquema de recuperação de energia deslizante usado no mecanismo de indução, SPG. O controle de velocidade abaixo da velocidade síncrona é obtido controlando a potência deslizante. A mesma abordagem foi adotada no controle da resistência ao rotor.
No entanto, em vez de desperdiçar poder em resistências externas, é usado aqui. Consequentemente, esses métodos de controle de velocidade são classificados como um esquema de recuperação de energia deslizante usado nos padrões de recuperação do motor de indução. Dois desses padrões, o treinamento estático estático e o treinamento estático de Kramer são descritos aqui.
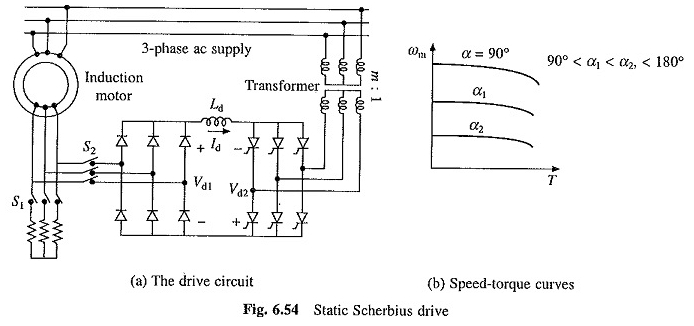
Drive de Scherbius estático (Fig. 6.54 (a)):
Ele fornece controle de velocidade de um motor de rotor de feridas sob velocidade síncrona. Parte da potência CA do rotor é convertida em CC por uma ponte de diodo. O retificador controlado operando como um inversor o converte em CA e o retorna à fonte CA. O poder foi devolvido (ou seja,
Pr) pode ser verificado controlando o contador do inversor EMF VD2, que por sua vez é controlador controlando o ângulo do tensionador. A indutância da ligação CC é fornecida para reduzir a ondulação no link CC atual.
Como o esquema de recuperação do poder deslizante usado no motor de indução é dado à fonte, diferentemente do controle da resistência ao rotor, onde é desperdiçado em resistência, a direção tem alta eficiência.
O leitor tem maior eficiência do que o controle de tensão do estator por controladores de tensão CA pelos mesmos motivos.
A fonte de alimentação de entrada de direção é a diferença entre a energia de entrada do motor e a potência retornada. A potência de entrada reativa é a soma dos poderes reativos do motor e do inversor. Portanto, o disco tem um mau fator de poder em toda a praia de sua operação.
Na Figura 6.54 (a), negligenciando o estator e as gotas de rotor

Onde α é o ângulo de disparo do inversor e, n e m são, respectivamente, a proporção do estator / rotor das voltas da proporção do motor e do lado da fonte com conversor das voltas no transformador. Negligenciar a queda através do indutor
![]()
Substituindo equações. (6.93) e (6,94)

onde a = n / m.
O valor máximo de α é limitado a 165 ° para uma comutação segura dos tiristores do inversor. A mudança pode ser verificada de 0 a 0,966a quando α passou de 90 para 165 °. Por escolha apropriada de A, a faixa de velocidade necessária pode ser obtida.
O transformador é usado para corresponder às tensões VD1 e VD2. Na velocidade mais baixa do leitor, o VD1 terá o valor máximo VD1M dado por
![]()
onde Smax é o valor do deslizamento na velocidade mais baixa. Se α é limitado a 165 °, M é escolhido de tal maneira que a tensão do inversor tem um valor VD1M quando α é 165 °, ou seja,

Essa escolha de M garante o funcionamento do inversor no ângulo de tiro mais alto na velocidade mais baixa do motor, fornecendo o fator de potência mais alto (Eqn. (5.109)) e a menor potência reativa na velocidade mais baixa.
Isso melhora o fator de potência no tubo e reduz a potência reativa a todas as velocidades da faixa de velocidade do leitor.
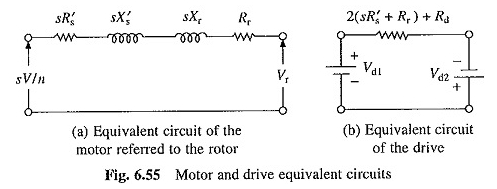
A Figura 6.55 (a) mostra um circuito do motor equivalente referido ao rotor, negligenciando o ramo de magnetização. Derivação da equação. (6.90) mostra que, quando referido ao link CC, a resistência (SR’s + RR) será 2 (SR’s + RR). Isso fornece um circuito equivalente CC aproximadamente do leitor (Fig.
6.55 (b)), onde VD1 e VD2 são fornecidos nas equações. (6.93) e (6,94). RD é a resistência da indutância da conexão DC. O circuito equivalente ignora a comutação sobre a ponte do diodo. AGORA

Se a perda de cobre do rotor for negligenciada
A natureza das curvas de torque de velocidade é representada na Figura 6.54 (6).
O leitor possui aplicações nos discos do ventilador e na bomba que requerem controle de velocidade apenas em uma faixa estreita. Se o deslizamento máximo for indicado pelo SMAX, as avaliações de potência da ponte do diodo, o inversor e o transformador podem ser apenas o SMAX vezes a potência do motor (Eq. 6.97).
Por exemplo, quando a velocidade deve ser reduzida abaixo da velocidade síncrona em apenas 20%, as avaliações de energia da ponte de diodo, o inversor e o transformador serão apenas 20% da potência do motor. Portanto, a unidade tem um baixo custo.
O leitor é iniciado controlando a resistência com S1 fechado e S2 aberto (Fig. 6.54). Quando a velocidade atinge a faixa de controle do leitor, o S2 é fechado para conectar a ponte do diodo e o inversor é ativado. Agora S1 está aberto para eliminar a resistência.
Nos ventiladores e no treinamento de bombas, a frenagem não é necessária, porque a pressão do fluido fornece torque de frenagem adequado. Para manter um fluxo constante com variações na cabeça da pressão e a natureza do fluido bombeado, o leitor é usado com controle de velocidade de loop fechado.
Um esquema de controle da velocidade do loop de fechamento com o controle da corrente interna é ilustrado na Figura 6.56. Funciona da mesma maneira que o diagrama da Figura 3.5.
Este disco é amplamente utilizado em treinamento médio e alto do ventilador e bomba (até aproximadamente 10 MW), devido à alta eficiência e baixo custo.
Este disco fornece controle constante de torque (Eqn. (6.98)). O controle constante de energia é obtido pelo estático Kramer Player descrito abaixo.
Drive Kramer Static:
A potência deslizante do rotor é convertida em CC por uma ponte de diodo (Fig. 6.57 (a)). A energia do CC agora é transformada em um motor CC associado mecanicamente ao motor de indução. O casal fornecido às custas é uma quantia de torque produzida pelos motores de indução e corrente direta. O controle de velocidade é obtido controlando o campo do mecanismo de corrente contínua.

A Figura 6.57 (b) mostra variações em VD1 e VD2 com uma velocidade para dois valores de corrente de energia motor CC. A operação permanente é obtida quando vd1 = vd2, ou seja, a e b para campos de campo se1 e if2.
O controle de velocidade é possível da velocidade síncrona cerca de metade da velocidade síncrona. Quando uma faixa de velocidade maior é necessária, a ponte do diodo é substituída por uma ponte do tiristor.
Agora, a relação entre VD1 e a velocidade pode ser alterada controlando a raiva do retificador do tiristor (veja a Fig. 6.57 (c)). A velocidade agora pode ser verificada até parar.