Fonte quadrada da fonte de tensão do inversor nutrido na indução do motor:
O leitor de mecanismo de indução nutrido com o inversor de tensão de onda quadrada é um tipo de conversor de ligação CC, que é um dispositivo de conversão de dois etapas. Uma dieta de três fases é primeiro retificada usando um retificador na lateral da linha.
O CC retificado é revertido no CA da frequência desejada por um inversor na lateral da carga, como mostrado na Figura 4.22. Quando a carga não pode fornecer a energia reativa necessária para o inversor, o inversor deve necessariamente ser uma força comum.
A indutância no circuito de link CC fornece suavização, enquanto a capacidade mantém a consistência da tensão de ligação. A tensão de ligação é uma qualidade controlada.
A tensão instantânea nos terminais da máquina (nos terminais de saída do inversor) é a qualquer momento diretamente proporcional à tensão de conexão CC (fonte de alimentação de CC, com baixa impedância interna) e a corrente da máquina (saída) é uma função da ingestão de carga.
Consequentemente, a carga ideal para um motor de indução alimentado com o inversor da fonte de onda quadrada, levando em consideração os harmônicos na corrente de carregamento, deve ser muito indutiva e ter um baixo fator de potência.

Com a comutação apropriada dos tiristores do inversor, a tensão do link CC fica impressionada através das fases do mecanismo de indução alternadamente. A forma de onda de tensão nos terminais de saída depende apenas dessa comutação e desta condução de tiristores.
Se os tiristores liderarem 180 ° em um período, a tensão de saída será na forma de uma onda quadrada. Nesse caso, o controle de tensão é obtido por meio de um retificador controlado na fase na lateral da linha.
A tensão do link CC é variável e a forma de onda de tensão de saída permanece a mesma em todas as cargas e frequências. O inversor também é chamado de inversor de onda quadrada, porque a tensão de saída é uma onda quadrada.
Esses inversores têm problemas de comutação em frequências muito baixas, pois a ligação DC disponível nessas frequências não pode carregar suficientemente os capacitores de comunicação para comunicar os tiristores. Isso coloca um limite à frequência operacional inferior.
Para estender a frequência a zero, os circuitos de carga especiais devem ser usados. A faixa de controle de velocidade do inversor da onda quadrada em um inversor nutrido com indução operando em um inversor de onda quadrada é 1: 20.
A polaridade da tensão do link CC não pode ser modificada. Consequentemente, durante a regeneração, a direção atual no circuito de conexão deve ser revertida. Um conversor de fase separado é necessário na lateral da linha para regeneração, como mostrado na Figura 4.22.
A frenagem dinâmica pode ser usada usando resistores comutados. O sistema dinâmico do sistema não é muito bom em baixas frequências.
É possível o início do motor doce. Uma máquina operando em uma frequência variável, o conversor de tensão variável não requer equipamento inicial adicional.
A máquina opera normalmente na parte linear da curva de velocidade de torque e não vê o torque e a corrente travada do rotor em sua partida. A máquina possui características idênticas do ponto síncrono no ponto máximo de torque, a cada frequência.
O torque e a corrente da máquina podem ser mantidos constantes nesta praia, variando a frequência e a tensão simultaneamente e suavemente a um torque e corrente constante na velocidade necessária, variando a frequência do estator e mantendo a frequência do rotor constante.
A aceleração está no modo controlado por fluxo constante. O modo em que a mudança é mantida constante e o fluxo é controlado (modo de fluxo deslizante constante) também é possível para fins de partida. Esses métodos aumentam a eficácia do leitor.
Quando a mudança é usada como uma quantidade controlada para manter a constante de fluxo no motor, o leitor é chamado de leitor controlado deslizante.
Ao tornar o deslizamento negativo (isto é, diminuindo a frequência de saída do inversor), a máquina pode ser projetada para operar como um gerador e a energia das peças rotativas subiu para o conversor de linha adicional ou dissipada em uma resistência para frenagem dinâmica.
Mantendo a frequência de deslizamento constante (ou um deslizamento de controle), a frenagem em um torque e a corrente constante pode ser realizada. Assim, a frenagem também é rápida.
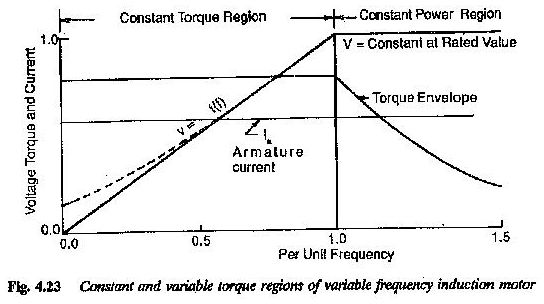
Como a tensão pode variar para manter o fluxo constante, a operação constante do torque é possível até a frequência nominal. Além da frequência nominal, a tensão permanece em seu valor nominal e a máquina opera no modo de fluxo.
O motor fornece uma saída constante a todas as velocidades e é chamado de modo constante de energia de cavalos. Esses modos são representados na Figura 4.23.
O motor recebe tensões de ondas quadradas. Essa tensão tem componentes harmônicos. A corrente de reforço resultante não é sinusoidal, com picos. Esses picos realmente decidem a classificação do design do inversor. Os harmônicos atuais do estator causam perdas e aquecimento adicionais.
O motor requer, portanto, um estreitamento ou para um determinado poder de um determinado cavalo, um motor de grandes dimensões deve ser usado.
Esses harmônicos também são responsáveis pelos pulsos de torque. A reação do quinto e da sétima harmônicos com os fundamentais dá origem aos sextos harmônicos desenvolvidos pelo casal.
Para um inversor da fonte de onda quadrada alimentada a um motor de indução nutrido a partir de um inversor de onda quadrada, o conteúdo harmônico da corrente tende a permanecer constante independente da frequência de entrada, na praia das frequências operacionais do inversor.
O pico e as correntes harmônicas da linha e a corrente do estator são influenciadas pela reatância dos vazamentos do motor. A reatância de vazamentos é alta menor é o conteúdo harmônico e o valor máximo da corrente do estator.
Portanto, é necessário escolher um motor de indução com uma grande reatância de vazamento para operação em um motor de indução alimentado com a fonte quadrada de onda quadrada. Como as correntes avançadas são mais baixas, a avaliação do projeto do inversor diminui. O controle de loop aberto é possível, mas pode ter problemas de estabilidade de baixa velocidade.
A operação multimotora é possível e a comutação é independente da carga. O conversor representa uma fonte e o motor pode ser conectado. Consequentemente, nenhuma correspondência entre o conversor e a carga é necessária.
Como dirigir para Slide, um motor VSI do Fed tem as seguintes características adicionais:
O controle de fluxo indireto pode ser obtido pelo controle deslizante. Como a quantidade de equilíbrio é especificada no controle, o comportamento dinâmico pode não ser satisfatório. É possível um controle preciso de torque em uma ampla gama de velocidades (às vezes quando parada).
É um leitor muito eficaz, com um fator muito bom de eficiência e energia, quando a frequência de deslizamento é limitada à parte linear da curva de velocidade de torque.
Nenhum equipamento inicial é necessário e a aceleração muito rápida é possível para torque e corrente constantes. A regeneração ou frenagem dinâmica também é possível para torque e corrente constantes. Quatro leitores de quadrante são possíveis.
O controle da frequência de loop fechado fornece unidade de velocidade variável com características do motor CC no sistema Ward Leonard.
As características de um motor de indução nutridas ao inversor da fonte de onda quadrada podem ser resumidas da seguinte forma:
1. Os pousadores impressionaram a tensão de corrente contínua da amplitude variável.
2.A mesmo para o jogador multimotor.
3. O pedido é independente da carga. O conversor e a carga não precisam ser o conversor representa uma fonte à qual o motor pode ser conectado.
4.Estas frequências de saída do conversor de corrente de até 1500 Hz são possíveis. Este disco é muito adequado para (motores de) operação de alta velocidade. Os discos estão disponíveis até a notação de 200 kVA.
5.A menor frequência operacional limitada pela comutação é de aproximadamente 5 Hz. A faixa de velocidade é 1: 20.
6. Não adaptado à aceleração na carga e mudanças repentinas de carga.
7. O comportamento dinâmico é muito bom em alta velocidade.
8. A frenagem dinâmica é possível. A regeneração (quatro operações de quadrante) requer um conversor antiparalelo conectado adicional ao lado da linha. A reversão da velocidade é obtida modificando a sequência de fases.
9.A tensão de entrada para o motor não é sinusoidal. Isso resulta em perdas adicionais, pulsos de aquecimento e torque.
10. O motor deve ter uma indutância de vazamentos grandes o suficiente para limitar as correntes avançadas e reduzir o conteúdo harmônico THP.
11. O controle do abridor do motor é possível, mas pode ter um problema de estabilidade de baixa velocidade.
12. O fator de potência da linha é ruim devido ao controle de fase.
13. Pode ser operado como um leitor controlado deslizante.
14. Ele encontra o aplicativo como um treinamento industrial para uso geral de energia baixa a média.