Freio do motor de indução dinâmica (ou frenagem reostática):
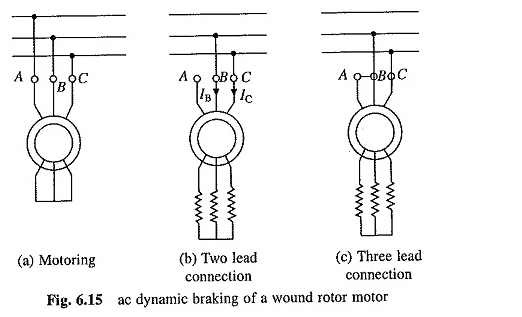
(a) O freio dinâmico de CA – a frenagem dinâmica do motor de indução é obtida quando o motor é executado em uma fonte de alimentação de fase única, desconectando uma fase de origem e deixando -o aberto (Fig. 6.15 (b)) ou conectando -o a outra fase da máquina (Fig. 6.15 (c)).
As duas conexões de fig. 6.15 (b) e (c) são chamados de duas e três conexões de chumbo. Quando conectado a uma fonte de alimentação de 1 fase, o motor pode ser considerado alimentado por uma sequência positiva e negativa em três fases de tensões.
O torque líquido produzido pela máquina é uma soma de casais devido a tensões de sequência positiva e negativa. Quando o rotor tem alta resistência, o torque líquido é negativo e a operação de frenagem é obtida. A análise do motor para duas e três conexões de chumbo é feita da seguinte forma:
Duas conexões de chumbo: suponha que a fase A de um motor conectado em Y lá no circuito aberto. Então IA = 0 e IC = -IB. Consequentemente, os componentes de IP de sequência positiva e negativa e, respectivamente, são dados por

onde α é dado pela equação. (6.17).
Como os componentes de sequência positiva e negativa são iguais e opostos, dois circuitos equivalentes podem ser conectados à oposição da série. A tensão a ser aplicada a esta combinação serial será

Com uma tensão aplicada JVBC / √3 Se a corrente for ip = – in = jib / √3, segue -se apenas com uma tensão de fase aplicada V, a corrente seria ib / √3. O circuito equivalente pode, portanto, ser desenhado como mostrado na Figura 6.16 (a).
Embora os valores dos componentes de sequência positiva e negativa da corrente sejam iguais, os casais correspondentes não são. A natureza das curvas de velocidade de velocidade para correntes de sequência positiva e negativa e o torque líquido são representados na Figura 6.16 (b).
Por escolha apropriada da resistência ao rotor, o torque de frenagem pode ser obtido em toda a faixa de velocidade. Como a resistência ao rotor necessária é grande, a frenagem dinâmica do CA do motor de indução só pode ser usada nos motores do rotor da ferida.
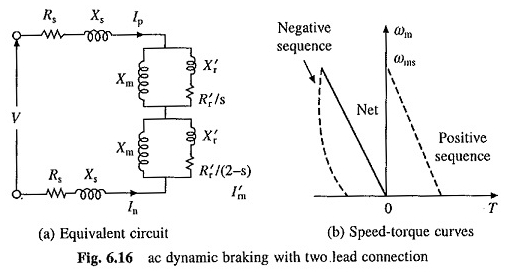
Nesse sentido a altas velocidades (ou baixos valores deslizantes), a impedância da parte de um componente de sequência positivo se torna muito alta. Como os componentes de uma sequência positiva e negativa da corrente devem ser iguais, o torque de frenagem líquido é pequeno e, portanto, a frenagem não é muito eficaz.
Conexão com três pellets: Aqui, duas fases do carretel do motor conectado conectadas Y são conectadas em paralelo em série com a terceira fase (Fig. 6.15 (c)). Deixe as fases A e B

Ao contrário de duas conexões de chumbo, a magnitude dos componentes de uma sequência positiva e negativa da tensão é igual e não os componentes da sequência positiva e negativa das correntes. O circuito equivalente é ilustrado na Figura 6.17.
As partes de uma sequência positiva e negativa do circuito são independentes e, portanto, nenhuma restrição é imposta ao componente de sequência negativa da corrente por uma parte de sequência positiva do circuito equivalente.
Assim, são obtidos casais de frenagem mais altos (em comparação com duas conexões de chumbo) em altas velocidades. A natureza da característica da velocidade do filhote com essa conexão é a mesma da Figura 616 (b).
Qualquer desigualdade entre as resistências de contato nas conexões de duas fases em paralelo reduz o torque de frenagem e pode até levar a um torque automotivo, porque a condição tende mais a duas conexões de chumbo com uma resistência crescente em uma das duas fases (como a resistência ao rotor usada é menor que a conexão a dois chumbo).
Consequentemente, a conexão com dois chumbo é geralmente preferida, apesar de seu torque fraco. A principal aplicação de frenagem de uma única fase ca é a altura do guindaste.
(b) frenagem auto-excitada usando capacitores: neste método, três capacitores são constantemente mantidos conectados através dos terminais do motor. Os valores dos capacitores são assim escolhidos como quando são desconectados da linha, o motor opera como um gerador de indução auto-excitado.
A conexão de frenagem é representada na Figura 6.18 (a) e o processo de auto-excitação é explicado na Figura 6.18 (b) sem condição de carga. A curva A não é uma curva de magnetização da máquina da máquina a uma determinada velocidade, e a linha B representa a corrente através dos capacitores, dada por
![]()
onde E é o estator induzido pelo estator por fase.
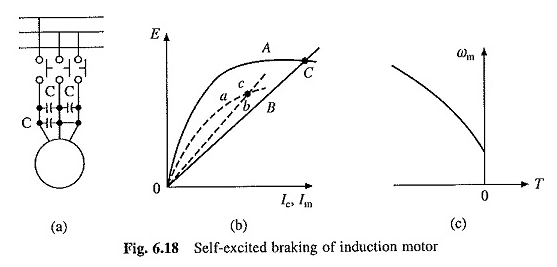
Os capacitores fornecem a corrente reativa necessária para a emoção. A operação ocorre no ponto C, que é a interseção de duas características. Quando a velocidade cai, o valor de E para a mesma corrente de magnetização cai e a nova característica da magnetização A é obtida.
Por outro lado, a inclinação da característica e contra o IC aumenta, dando uma nova característica B. A interseção de duas curvas ocorre agora c. Assim, a redução na velocidade enquanto move as curvas de magnetização para baixo, a inclinação da tensão do capacitor versus a curva atual aumenta.
Em uma certa velocidade crítica, que geralmente é alta, duas curvas não se encontram e a máquina não se excita e o torque de frenagem cai para zero. A característica da velocidade de freio auto-excitada é representada na Figura 6.18 (c).
Às vezes, as resistências externas são conectadas nos terminais do estator para aumentar o torque de frenagem e dissipar uma certa energia gerada fora da máquina. A construção da Figura 6.18 (b) é válida apenas para qualquer operação de carga.
Para uma análise mais precisa, a redução da impedância motora deve ser levada em consideração. Esse diagrama raramente é usado, porque o torque de frenagem cai para zero a uma velocidade que geralmente é alta.
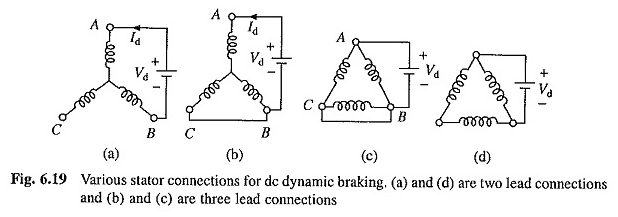
(C) freio dinâmico CC: é obtido quando o estator de um motor de indução operando a uma velocidade é conectado a uma fonte de alimentação direta. Duas conexões comumente usadas, duas e três, para conexões de estrela e delta são representadas na Figura 6.19.
Um método para obter uma fonte de CC usando uma ponte de diodo para duas conexões de chumbo é ilustrado na Figura 6.20.
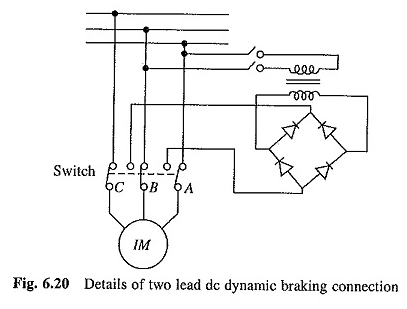
A corrente CC cruzando o estator produz um campo magnético estacionário. O movimento do rotor neste campo induz uma tensão no rotor do rotor. A máquina, portanto, funciona como gerador.
A energia gerada é dissipada na resistência ao circuito do rotor, fornecendo assim a frenagem dinâmica do motor de indução.
Como o campo é estacionário, a velocidade relativa entre os drivers do rotor e o campo agora é ωm. A frequência de tensão induzida será igual à frequência da tensão da fonte CA (ou a frequência do motor nominal) quando ωm = ωms.
Ou a tensão induzida no rotor durante a corrida a uma velocidade síncrona. Quando opera a uma velocidade ωm, a tensão induzida e sua frequência serão Ser e SF, respectivamente. ENTÃO

Isso fornece um circuito equivalente na fase da Figura 6.21 (a) para o rotor. A divisão de todas as quantidades por S produzirá um circuito equivalente à frequência nominal.
Em referência a vários parâmetros equivalentes do circuito, obtidos das torres do estator, fornece um circuito equivalente na fase do rotor ilustrado na Figura 6.21 (b). O circuito equivalente do estator sob a frenagem dinâmica de CC do motor de indução é ilustrado na Figura 6.21 (c).
Para combinar com um circuito de rotor equivalente na Figura 6.21 (b), devemos primeiro obter um circuito equivalente por fase do estator na frequência nominal. Circuito equivalente A Fig. 6.21 (c) sugere que o MMF do estator é constante e independente da velocidade.
Portanto, imaginamos que o estator é alimentado por uma fonte de energia de frequência nominal em três fases, fornecendo uma corrente de fase. O CA atual é equivalente ao ID, desde que produz o STATOR MMF da mesma amplitude que o ID da corrente CC.
Assim, substituímos um estator MMF estacionário produzido pelo ID de corrente CC por um MMF (produzido por IS) de amplitude idêntica, mas girando em velocidade síncrona.
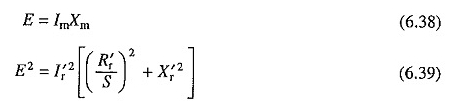
A diferença desses dois MMFs será um MMF de gap aéreo que será responsável pela produção de gap ar que, por sua vez, causa a tensão da frequência nominal induzida no estator. O circuito equivalente na fase do estator na frequência nominal assume a forma ilustrada na Figura 6.21 (d).
A combinação de circuitos equivalentes da Fig. 6.21 (6) e (d) e a retirada do transformador fornece uma frequência nominal por circuito equivalente na fase (Fig. 6.21 (e)).

É pequeno para pequenos s e, portanto, as abordagens IM. Devido a um alto valor de mensagens instantâneas, o circuito magnético é saturado. Assim, o XM não é constante, mas varia com o IM. Para uma análise precisa, a variação do XM com IM deve ser levada em consideração.
A relação entre IS e ID depende da conexão do estator. Por exemplo, vamos derivá -lo para as duas conexões de chumbo na Figura 6.19 (a). Aqui ia = id e ib = – id.
Se n for um número efetivo de voltas em cada enrolamento, o MMF máximo produzido pela fase A será IDN e o MMF máximo produzido pela Fase B será (-idn). Supondo que esses MMFs sejam distribuídos sendoidalmente no espaço, o resultado do MMF resultante será
Quando a máquina é alimentada por uma fonte de corrente de três fases equilibrada, o pico do STATOR MMF é

É equivalente a id quando f = f ‘. Portanto, das equações. (6.35) e (6.36)
![]()
Os valores de são para outras conexões (Fig. 6.19 (b), (c) e (d), respectivamente) são:
![]()
A característica da velocidade da torca é calculada da seguinte forma.
Do circuito equivalente da Figura 6.21 (e)
Considere a distribuição de correntes entre os ramos paralelos formados por XM e o rotor

Subtração da equação. (6.39) de (6,40) rendimentos

Da equação (6.39)

O torque do motor é

Como XM depende da IM, Eqs. (6.38) – (6.42) são equações algébricas não lineares. O uso das etapas a seguir evita a necessidade de uma solução digital. Suponha que um valor de im, obtenha e correspondente da característica de magnetização, calcule XM a partir da equação.
(6.38), obtenha o R de (6.41), calcule s a partir de (6.42) depois ωm e t das equações. (6.34) e (6.43), respectivamente.
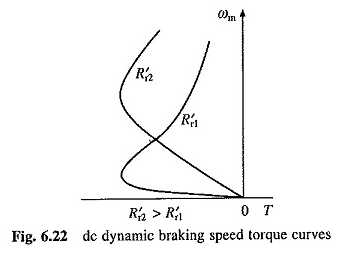
A Figura 6.22 mostra a natureza das curvas de torque de velocidade para dois valores de resistência ao rotor. Em um motor de gaiola de esquilo ou um motor de rotor de madeira sem resistência externa no rotor, o torque máximo ocorre em baixa velocidade.
Enquanto o torque máximo é independente da resistência ao rotor, a velocidade na qual o torque máximo ocorre aumenta com a resistência ao rotor. Quando fig.
6.22 DC A frenagem dinâmica da velocidade do motor de indução Curvas de casal de frenagem é necessária, a resistência sensacional é conectada no circuito do rotor e é cortada quando a velocidade cai.
Quando usado para manter uma carga ativa, como nos enroladores de minas, a alta resistência é conectada para obter curvas de aceleração com uma inclinação negativa, a fim de garantir a estabilidade no estado de equilíbrio.
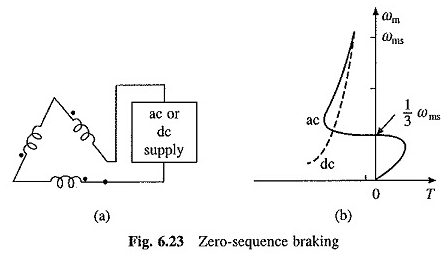
(d) Sequência zero livre: Nesta frenagem, três fases do estator são conectadas em série por meio de uma fonte CA ou CC de fase única, como mostrado na Figura 6.23 (a). Essa conexão é conhecida como conexão de sequência zero, porque as correntes em todos os destaques do estator são co-plataformas.
O MMF causado por correntes de co-país (ou sequência zero) produz um campo magnético três vezes o número de pólos para os quais a máquina é realmente enrolada. Com uma fonte de alimentação CA, o campo resultante está estacionário no espaço e vai para a frequência da fonte de alimentação.
Com a fonte de alimentação DCE, o campo resultante está estacionário no espaço e é de magnitude constante. Uma vantagem importante dessa conexão é a carga uniforme de todas as fases do estator. A natureza das curvas de velocidade de velocidade para a fonte de alimentação CA e CC é ilustrada na Figura 6.23 (b).
Com o fornecimento de corrente alternada, a frenagem só pode ser usada até um terço da velocidade síncrona. No entanto, os casais de frenagem produzidos por essa conexão são consideravelmente maiores que o automóvel. O motor opera principalmente em frenagem regenerativa.
Para motores de baixa resistência ao rotor, uma parte importante da energia gerada é recuperada. Ao contrário da frenagem dinâmica do Motor de Indução, não requer alta resistência ao rotor e, portanto, pode ser usado ambos – com motores de esquilo e motores roton.
Com a fonte de alimentação, a frenagem está disponível em toda a faixa de velocidade. É essencialmente frenagem dinâmica, porque toda a energia gerada é desperdiçada na resistência ao rotor.
O arranjo de comutação, da operação de três fases para o zero normal, é extremamente simples quando o motor possui um estator conectado Delta.