Frenagem de mecanismo de indução:
Os três tipos de frenagem do motor de indução, como a frenagem regenerativa, dinâmica e de contra-corrente, também podem ser realizados com motores de indução.
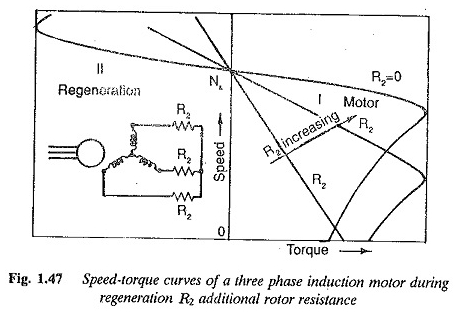
Frenagem regenerativa
Quando o rotor de um motor de indução funciona mais rápido que o campo do estator, o turno se torna negativo e a máquina gera energia. Portanto, sempre que o motor tende a operar mais rápido que o campo rotativo, a frenagem regenerativa ocorre e ke
Peças rotativas são devolvidas ao setor. A curva de velocidade de torque se estende ao segundo quadrante (Fig. 1.47). A velocidade do motor diminui. O torque de frenagem opera o motor em velocidade constante, interrompendo sua tendência a girar mais rapidamente.
Devido aos efeitos da resistência ao estator, o torque máximo desenvolvido durante a regeneração é maior que o torque máximo durante a manga. Em Palans e guindastes, o motor de acionamento tende a operar mais rápido que a velocidade síncrona.
Essa situação ocorre quando a talha levanta uma gaiola vazia. Devido ao contrapeso, o caso pode adquirir velocidades perigosas. A transição ocorre quase automaticamente e um casal é desenvolvido para interromper a aceleração e a regeneração.
Esse tipo de operação também é possível quando a carga revisa o motor durante a carga da carga. A regeneração automática interrompe a aceleração excessiva. O controle de resistência ao rotor pode ser usado para obter melhor torque de frenagem.
A frenagem regenerativa também é possível com um motor de mudança de poste quando a velocidade passa de alta para baixa. Também pode ser realizado em um leitor de frequência variável.
Ao diminuir temporariamente a frequência do motor, a velocidade síncrona diminui e as condições são favoráveis à regeneração.
Durante a frenagem regenerativa, existe a possibilidade de velocidades perigosas se o ponto de operação durante a frenagem cair na parte instável da característica. Isso acontece se o torque de carregamento for maior que o torque de falha do motor.
O torque desenvolvido não pode desacelerar o motor e a aceleração excessiva ocorre. Essa possibilidade pode ser eliminada por meio de alta resistência no rotor.
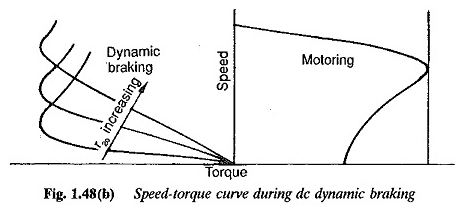
Frenagem dinâmica
A frenagem dinâmica é usada para frear um leitor que não reverte. O estator é transferido do setor CA para os pratos principais (Fig. 1.48 (a)). O DC cruzando o estator instala um campo estacionário. Isso induz correntes de rotor que produzem um casal para trazer o rotor rapidamente.
O torque se desenvolveu e o atraso durante a frenagem pode ser controlado pela quantidade de potência DC. Resistência adicional R1 e R2E nos circuitos do estator e do rotor, respectivamente, controlam os casais de excitação e frenagem de CC.

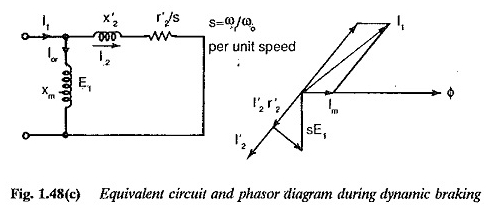
O circuito equivalente e o diagrama de fase do motor durante a frenagem dinâmica são representados na Figura 1.48 (c). Quando o estator é alimentado a partir de DC, o produto MMF está estacionário. Este MMF depende das conexões do estator para fonte de alimentação CC, o número de voltas e a corrente.
As possíveis conexões do estator para fonte de alimentação CC estão representadas na Figura 1.49. A corrente CC equivalente pode ser determinada assimilando os MMFs produzidos por essa corrente equivalente e pela corrente CA.
A corrente primária equivalente é responsável pela magnetização e corrente secundária do torque. O casal é dado por

Onde está uma mudança.
Do circuito equivalente que temos

Além disso, desde o diagrama de fases, temos
![]()
A partir do qual o MI pode ser determinado. O valor do XM é dado por
![]()
O casal é

A curva deslizante de torque pode ser determinada usando essa expressão. O torque máximo ocorre em um turno

E o torque máximo de frenagem é

A característica também pode ser desenhada usando o relacionamento

O torque de frenagem é proporcional a I21. No entanto, a saturação desempenha seu próprio papel e há a exaustão de um casal. O efeito de R′2 é semelhante aos efeitos durante a direção, ou seja, para dizer
Ele não modifica o valor do TMB, mas modifica o valor da velocidade com que o TMB ocorre. As curvas de velocidade típica são representadas na Figura 1.48.
Os valores de I1 e R′2 são controlados para fornecer a frenagem desejada. O primeiro é limitado por R1. Esse método é geralmente aplicado para desacelerar os motores, causando cargas ativas. A frenagem dinâmica é usada em conjunto com controle automático. A frenagem do motor de indução é mais popular em Palans do que o motor DC, devido a essa funcionalidade.
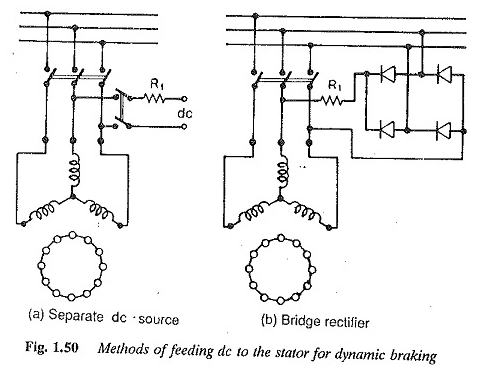
Os métodos de fornecimento de uma fonte de alimentação direta do estator são representados na Fig, 1,50. Pode ser fornecido por uma fonte de alimentação CC usando uma resistência limitada R1 no circuito para controlar a excitação do CC. O controle de torque é obtido por variação na resistência ao rotor.
Como alternativa, uma fonte de alimentação pode ser retificada por meio de um retificador de diodo e o CC resultante pode ser transferido para o motor.
Na frenagem dinâmica do CA, o estator foi a um banco de capacidade. A máquina opera como um gerador excitado de indução de automóveis. Toda energia mecânica é dissipada na forma de energia elétrica na resistência ao rotor. Este método não é lucrativo, devido ao custo dos capacitores.
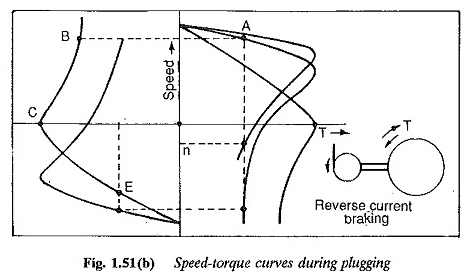
Atual
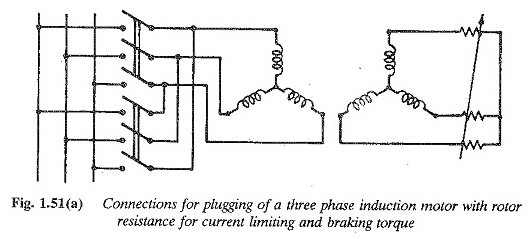
Ao modificar a sequência de fases da entrada em uma frenagem do motor de indução, a direção do campo do estator pode ser revertida. Na prática, isso é feito trocando a fonte de alimentação do motor (Fig. 1.51 (a)).
O torque de frenagem é desenvolvido e o motor repousa muito rapidamente. O motor deve ser extinto do setor quando a velocidade zero é abordada. Caso contrário, o torque desenvolvido acelera o motor na direção oposta. Este método também é chamado de plugues.
Quando o motor é bloqueado, a tensão induzida por E no quadro e a tensão aplicada V pode ser mutuamente e a corrente durante a frenagem é causada por E + V.
Isso pode levar a correntes muito altas, que são limitadas pela alta resistência ao rotor e também aumentam efetivamente o torque de frenagem.
A curva de velocidade da engrenagem de um motor de indução pode ser modificada variando a resistência ao rotor. O ponto máximo de torque pode ser feito para ocorrer na praia de 1-2 turno, onde o casal desenvolvido tende a frear o rotor.
Esse torque também pode ser usado para interromper a tendência do rotor para acelerar por um motivo ou outro (por exemplo, a revisão do motor ou uma dica aumentando a gaiola vazia).
A alta resistência é introduzida no rotor, para que o ponto de operação se mova para o quarto quadrante. O torque de frenagem desenvolvido impede qualquer aceleração do rotor e o rotor funciona a uma velocidade uniforme (Fig. 1.51 (b)).
Se o motor operar em um turno no momento do plugue, o torque total de frenagem é a soma do torque de conexão para (2 – s) e o torque de carregamento

O TP pode ser controlado por uma resistência do rotor variável que limita a corrente de frenagem.