Motores de indução de polifásicos elétricos:
Frenagem elétrica de motores de indução de polifásicos que consistem em diferentes tipos, a saber,
- Ramificação (ou frenagem de contra-corrente)
- Frenagem dinâmica (ou reostática)
- Frenagem regenerativa
1. Ramificação (ou frenagem contra a maré)
O plugue pode ser feito em um motor de indução simplesmente revertendo duas das três fases que causam a direção do campo magnético rotativo.
Ao alterar o motor para a posição do plugue, o motor opera na direção oposta à do campo e a velocidade relativa é de duas vezes [(2 – s) vezes] de velocidade síncrona, ou seja, a mudança é muito igual a dois, sendo igual a (2 – s).
A tensão induzida no rotor será, portanto, duas vezes de tensão normalmente induzida na parada e o enrolamento deve ser fornecido com isolamento adicional para suportar essa grande tensão.
Durante o período de conexão, o motor atua como um freio e absorve a energia cinética da carga sempre rotativa, causando a queda em sua velocidade. A energia pmech associada é dissipada na forma de calor no motor.
Ao mesmo tempo, o rotor também continua a extrair a energia do estator, que também é dissipada na forma de calor. Devido ao aumento da frequência do rotor, há perdas adicionais de ferro no rotor.
Assim, o calor desenvolvido no rotor durante o período de frenagem é cerca de três vezes o calor desenvolvido durante o período inicial (ou em um estado de rotor bloqueado).
O tamanho do mecanismo de indução em que o plugue deve ser aplicado é, portanto, decidido não carregando as condições isoladamente, mas também por condição de frenagem.
No caso de um motor de gaiola de esquilo, a energia é dissipada inteiramente na máquina; Enquanto no caso de um motor de rotor de feridas, essa energia também é dissipada na resistência externa adicionada no circuito do rotor para esse fim.
As condições de frenagem elétrica dos motores de indução de polifásica podem ser estudadas considerando as curvas de grito do motor do motor quando são estendidas além do ponto de 100%, como mostra a Figura 1.103 (a).
A ordenada no ponto B representa o torque no momento do plugue e podemos ver que o torque está aumentando gradualmente à medida que o motor se aproxima da parada, após o qual, é claro, se a linha de energia não estiver desconectada, ela se reconectará novamente na direção oposta, de acordo com a velocidade comum de curvas de torque de a a O.
Assim, vemos que, para trazer o motor de volta, é essencial desconectar a fonte de alimentação ao motor a uma velocidade zero.

A partir das curvas deslizantes de torque mostradas na Figura 1.103 (a), observa -se que a extensão do torque de frenagem é muito baixa em comparação com o torque máximo exercido pelo motor. Isso é particularmente assim para a baixa resistência do rotor.
À medida que cada vez mais resistência é inserida no circuito do rotor, o torque máximo ocorre em valores crescentes.
Esta é a razão pela qual os mecanismos de indução da gaiola de esquilo, que são projetados principalmente para a máxima eficiência e, portanto, para baixa resistência não são adequados para esse tipo de frenagem.
No caso de drivers de rotor das feridas, a adição de resistência no circuito do rotor gera cada vez mais torque de frenagem e, portanto, os motoristas do rotor das feridas são mais adequados para o plugue.
Se a mudança na resistência do rotor for ajustada para ajustar que o torque máximo de frenagem é exercido em todos os lugares, a frenagem ideal será alcançada pelo menos

A expressão do torque de frenagem negligencia a impedância do estator e a reatância magnetizante pode ser deduzida e é dada como

A corrente do rotor pode ser determinada durante o período de frenagem a partir da relação seguinte e é rastreada, como mostrado na Figura 1.103 (b).

Ou
- E2 é o EMF induz em cada fase do rotor em uma parada,
- R2 é a resistência ao rotor por fase e
- X2 é a reatância da parada do rotor por fase e
- S é a mudança.
Durante o período de felicidade, uma vez que o EMF induz no rotor é muito alto, como já indicado acima, a corrente do rotor e a corrente do estator são, portanto, muito altos. No entanto, a corrente de frenagem pode ser reduzida inserindo uma resistência externa no circuito do rotor.
A partir deste ponto, os drivers do rotor das feridas são benéficos em comparação com os motores do rotor da gaiola de esquilo.
Os mecanismos de gaiola de uma saída de cerca de 20 kW são conectados diretamente, usando a conexão em estrela se um interruptor Star-delta for fornecido. Motores maiores precisam de resistência ao estator. Os motores do rotor de feridas usam resistores de rotor para a limitação da corrente, bem como o desenvolvimento de casais de frenagem mais altos.
Problemas de classificação térmica podem ocorrer para direitos de frenagem frequentes, como já explicado acima, e os contatores podem precisar de manutenção frequente.
A reversão simultânea das conexões do estator e a inclusão da resistência ao rotor nos motores radiculares das feridas são bem possíveis, mas o mesmo efeito pode ser obtido incluindo os satuadores nos enrolamentos do rotor.
Como alternativa, uma gaiola de rotor de barra profunda pode aumentar a resistência efetiva do rotor após a operação do plugue, porque a frequência de deslizamento é subitamente aumentada de SF para (2 – s) F, onde F é a frequência de oferta.
Na prática, para reverter os discos em que a frenagem e o início do mecanismo de indução na direção oposta incluem as etapas do mesmo processo contínuo, o plugue é usado com vauidades.
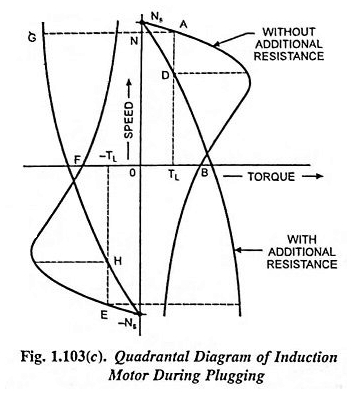
A operação do plug -in também pode ser explicada usando um diagrama de quadrante mostrado na Figura 1.103 (c). As características do acelerador mostrado na Figura 1.103 (c) são de fato uma extensão das características do motor no segundo e no quarto quadrante. A explicação da Figura 1.103 (c) é exatamente idêntica a uma para a Figura 1.94 (a) ou 1.94 (b).
2. Dinâmica (ou reostática) frenagem
Nesta frenagem elétrica de motores de indução de polifásica, a frenagem reostática pode ser obtida desconectando o enrolamento do estator de potência CA e excitando uma fonte de CC para produzir um campo estacionário de CC.
Na frenagem reostática, o enrolamento do estator é usado como enrolamento do campo CC e enrolamento do rotor como enrolamento da estrutura. Com uma máquina de rotor de feridas, as resistências externas podem ser inseridas no circuito do rotor para fornecer uma carga. Com as máquinas de gaiola de esquilo, no entanto, o rotor do próprio rotor deve formar a carga.
A fonte de excitação pode ser fornecida por uma fonte CC independente, ou do setor CA através de um conjunto de retificadores de transformador, como mostra a Figura 1.105.
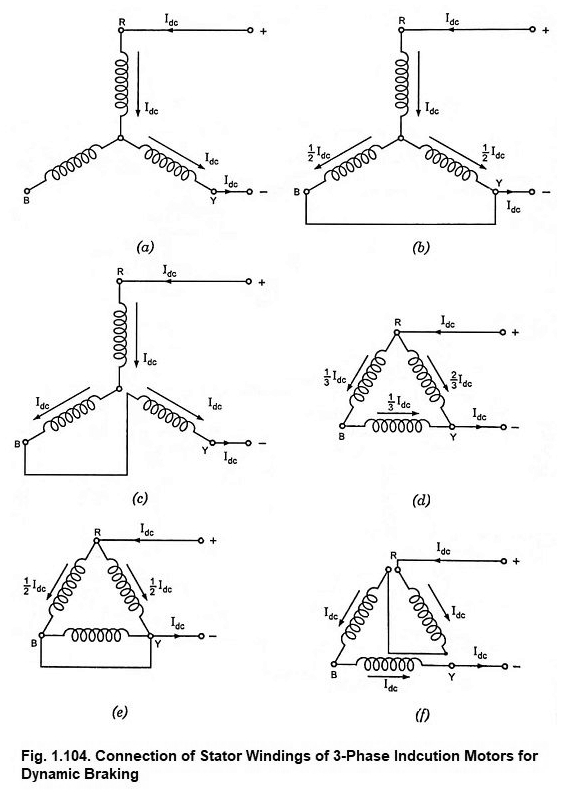
Vários métodos de conectar o estator a uma fonte CC estão representados na Figura 1.104. Embora as conexões mostradas na Fig. 1.104 (c) e 1.104 (f) forneçam uma corrente uniforme das três fases, mas são complicadas na operação de comutação.
Sendo mais simples nesse sentido, as conexões mostradas na Fig. 1.104. (a) e (b) são geralmente usados.

Um diagrama de conexão típico é apresentado na Figura 1.105; A máquina funciona como um motor com os contatores fechados, enquanto com o aberto e B fechado, uma corrente direta é fornecida por duas fases do estator, sendo a terceira deixada no circuito aberto.
A resistência r ‘é inserida no circuito do estator para limitar sua corrente. No caso de motores do rotor de feridas, resistência adicional é inserida no circuito do rotor para controlar o efeito de frenagem.
Enquanto a máquina opera normalmente na forma de um motor, seu estator de campo magnético funciona a uma velocidade síncrona na mesma direção que a do rotor, mas um pouco mais rápida que os condutores do rotor.
Quando os enrolamentos do estator são desconectados da energia CA e excitados com DC, o campo magnético produzido será imóvel no espaço, fazendo com que os condutores do rotor excedam o campo com uma velocidade (1 – s) ns ou SNs.
As correntes induzidas nos drivers do rotor serão opostas na direção daquelas correspondentes à operação automotiva, produzindo um torque de frenagem.
Embora o fluxo de ar-ar esteja estacionário, haverá o mesmo número de pólos que quando a máquina estiver excitada com a CA e as correntes do rotor terão, portanto, uma frequência próxima da frequência correspondente à velocidade síncrona (ou seja, para dizer ns) inicialmente, mas que diminui com a velocidade do rotor e se torna zero a ser livre, é a frequência de frequência de frequência.
Da mesma forma, a EMF induzida no rotor diminui no máximo quando o rotor está sendo executado, a zero na parada.
Em outras palavras, a EMF induzida no rotor será dada por SE2, onde E2 é a amplitude da EMF induzida no rotor quando corre em frente ao campo na velocidade NS.
Assim, observa -se que as condições do rotor durante a frenagem reostática de CC com a velocidade que cai de síncrono a parar é quase o mesmo que quando o motor acelera o normal.
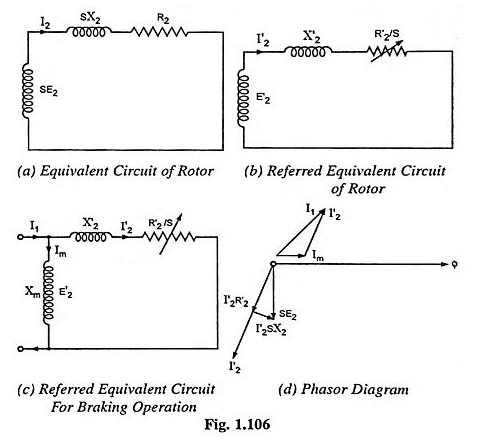
Consequentemente, o circuito equivalente do rotor pode ser representado conforme indicado na Figura 1.106 (a). Ao dividir a tensão e a impedância por S, temos o circuito ilustrado na Figura 1.106 (b) carregando a mesma corrente i2.
Como o enrolamento do estator transporta apenas a corrente direta, a indutância do estator não tem efeito sob a operação em regime permanente. A tensão CC aplicada através do enrolamento do estator é fixada apenas por resistência ao enrolamento do estator. Não haverá perda de ferro no núcleo do estator.
Mas a perda do núcleo do rotor terá uma magnitude considerável e, portanto, o valor de resistência ao rotor retornado ao estator, que determina o casal desenvolvido durante a frenagem, deve ser corrigido para levar em consideração, o EMF induz no rotor, na velocidade da simplonia, a passagem da lógica.
O circuito ilustrado na Figura 1.106 (b) pode ser modificado em um circuito ilustrado na Figura 1.106 (c). O diagrama de fases correspondente a este circuito modificado é ilustrado na Figura 1.106 (d),
Pode -se notar que a corrente do rotor alterna como produzida por um fluxo constante, causado por um MMF imn1 de magnetização, que permanece estacionário no espaço.
No entanto, quando visto do rotor, o MMF Magneticator e o fluxo resultante no estator parecerão alternar.
Além disso, como o rotor Ampère-contations i2n2 (= i’2n1) deve ser equilibrado pelos tators da ampère do estator para manter as torres de magnetização IMN1, as torres do estator i1N1 como rotor, representa a soma fasorosa da IMN1 e ‘2N21.
A corrente alternada atual I1 depende da amplitude da corrente direta transportada pelo estator e da natureza das conexões de enrolamento do estator, conforme explicado acima.
A partir da discussão acima, pode -se concluir que a operação do motor durante a frenagem reostática da CC pode ser analisada usando o circuito equivalente (o tipo do qual já estamos familiarizados) mostrado na Figura 1.106 (c).
O torque de frenagem pode ser determinado a partir do relacionamento
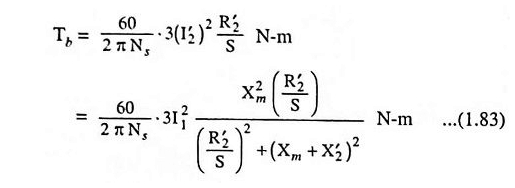
A equação acima nos permite determinar o torque de frenagem a qualquer velocidade de um determinado motor de indução, quando é excitado pela corrente direta, correspondente a um CA equivalente, que teria produzido o mesmo MMF que o da corrente direta real transportada pelos enrolamentos do estator.
Diferenciando a equação. (1.83) WRT S e assimilizá -lo a zero para um máximo, temos uma mudança correspondente ao torque de frenagem máxima

e casal máximo,

As características de desempenho típicas de um mecanismo de indução são ilustradas na Figura 1.107.
A amplitude do torque de frenagem desenvolvido pelo motor depende da excitação (resistência do campo desenvolvido pelo rolo do estator), a resistência do circuito do rotor e a velocidade do motor.
O efeito da variação da excitação I1 e da resistência do rotor R2 também é ilustrado na Figura 1.107 (a). Para fins de projeto, as curvas de resistência ao rotor do torque ilustradas na Figura 1.107 (b) às vezes são usadas.
Com o aumento da resistência ao rotor RO2, a velocidade na qual o torque máximo de frenagem também aumenta. No entanto, o torque máximo não aumentaria proporcional ao quadrado atual (i21), conforme indicado pela equação.
(1,85), porque a reatância de magnetização XM diminui devido à saturação causada por um aumento na corrente I1.
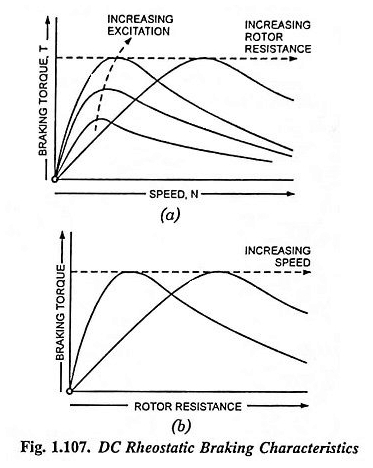
A operação de frenagem estável está na parte da régua da curva de velocidade de torque [ou seja, no lado esquerdo da posição máxima de torque na Figura 1.107 (a)].
Se inadvertidamente, a velocidade sobe acima daquela para a qual o torque é máximo, um novo aumento na velocidade é causado por uma diminuição no torque de frenagem, o que pode levar a um novo aumento na velocidade no caso de uma carga de recção.
No início da aplicação de frenagem, precisamos, portanto, alta resistência no circuito do rotor, que deve ser gradualmente reduzido com uma diminuição da velocidade.
O torque de frenagem pode ser verificado por qualquer um ou os dois métodos a seguir: (i) controlando o du du du du duc (ii) variando a resistência ao rotor.
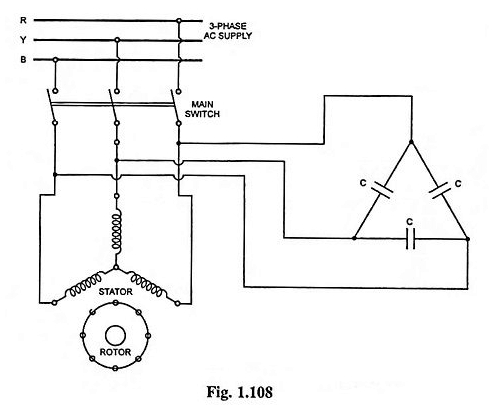
A frenagem dinâmica de CA pode ser obtida com auto-excitação, conectando enrolamentos do estator a um banco de capacitores estáticos, como mostra a Figura 1.108. Nesse caso, a máquina de indução opera como um gerador de indução que recebe sua excitação CA dos capacitores estáticos.
A energia elétrica gerada é dissipada na forma de calor no circuito do rotor. A frenagem dinâmica de CA não é popular devido ao custo relativamente alto dos bancos de capacitores.
A frenagem dinâmica de CC exige pouca potência da fonte de alimentação e fornece um torque de frenagem suave, útil para enrolamentos de mineração e cargas de alta inércia.
Suas vantagens em comparação com o plugue é a ausência do campo oposto de rotação da rotação [e, portanto, nenhuma tendência para a máquina voltar] e uma perda de rotor inferior. Ao aumentar a resistência ao rotor, o torque de frenagem pode ser mais eficaz em velocidades mais altas.
Portanto, esse método é muito adequado para as cobranças de revisão tardia. No caso de um motor de gaiola de esquilo, como a resistência ao rotor é pequena, ele aplicará o torque de frenagem em velocidades muito baixas e, portanto, só útil para trazer a carga.
O advento do controle automático da frenagem dinâmica na frenagem elétrica de motores de indução de polifásicos usando sistemas de malha fechada, tornou os motores de indução mais populares que os motores CC, em particular para empregar discos em palanos de mineração.
A Figura 1.109 mostra as características quadrantais do motor de indução em condições dinâmicas de frenagem.

3. frenagem regenerativa
A frenagem regenerativa é uma característica inerente de um mecanismo de indução, pois funciona como um gerador de indução quando se estende em velocidade acima do síncrono e retorna a energia à linha de energia.
O mecanismo de indução de três fases pode ser projetado para operar em alta velocidade a velocidade síncrona usando um dos seguintes processos.
- Vá para uma oferta de baixa frequência em mecanismos de indução controlada por frequência para reduzir a velocidade de operação do leitor.
- Movimento para baixo de um mecanismo de elevação carregado, como guindastes, palans, escavadeiras, etc.
- Vá para uma operação de pólo maior de um menor em motores de gaiola de esquilo de várias velocidades.
Em todos os processos acima, a mudança e o torque desenvolvidos se tornam negativos, como mostra a Figura 1.110 e, portanto, a máquina atua como um gerador, recebendo energia mecânica e restaurando -a ao sistema de fonte de alimentação na forma de energia elétrica.
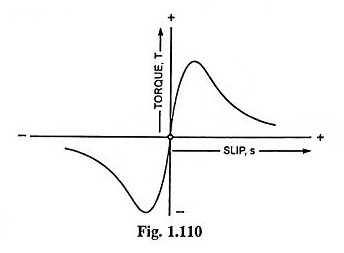
Se a carga causar o motor acima da velocidade síncrona, nenhuma operação de comutação será necessária. Depois que a máquina é acionada acima da velocidade síncrona, a operação de frenagem é iniciada automaticamente.
O ponto de operação dependerá da amplitude do torque de carga e da natureza da característica da velocidade de torque da máquina durante a operação de geração.
Ao variar a resistência no circuito do rotor, é possível operar a qualquer velocidade acima da velocidade síncrona durante a frenagem.
No caso de o torque de carregamento da carga exceder o torque máximo de frenagem, cuja máquina é capaz, o sistema se torna instável e a velocidade aumentará ainda mais, provavelmente para um valor desastroso, porque quanto mais a máquina funcionará rapidamente, menos será desenvolvido o torque de frenagem.
No caso de um mecanismo de indução da gaiola do esquilo, uma velocidade estável é obtida a uma velocidade consideravelmente maior que a velocidade síncrona e a frenagem regenerativa só poderá ser aplicada se o motor for especialmente projetado para resistir à velocidade excessiva.
A frenagem regenerativa tem a desvantagem da possibilidade de frenagem apenas em velocidades super síncronas e, consequentemente, é Seldome usada para frenagem.
Esse método de frenagem elétrica de motores de indução de polifásica só pode ser usado no tipo de mecanismo de elevação ou com um motor de gaiola de esquilo de várias velocidades. Também é vantajoso nas ferrovias da montanha.
Ele retorna cerca de 20% da energia total para certas corridas ferroviárias e economiza muitas roupas de sapatos de freio.