Início do treinamento motor de indução:
Iniciando o arranjo do treinamento do motor de indução é escolhido de acordo com os requisitos de carga e a natureza da fonte de alimentação (baixa ou rígida). Pode ser necessário ter os seguintes recursos:
- O motor deve desenvolver torque de partida suficiente para superar o atrito, o torque de carregamento e a inércia do sistema de carga do motor e, portanto, preencher o processo de partida dentro de um tempo prescrito.
- A amplitude da corrente de partida deve ser tal que não cause superaquecimento da máquina e não causa queda na tensão de origem além de um valor autorizado.
Geralmente, um motor desenha 5 a 7 vezes a corrente nominal durante o início -up.
Quando o torque de carregamento durante a inércia de início e a inércia de carga do motor não é importante, o início do processo de treinamento do motor de indução é concluído em alguns segundos e, portanto, a temperatura do motor não excede o valor autorizado.
Nesses aplicativos, o mecanismo sempre pode ser iniciado diretamente on -line, desde que a queda na tensão causada por uma grande corrente de partida não esteja além de um valor autorizado. Para motores pequenos, a queda na tensão no tubo de energia geralmente está abaixo do nível aceitável.
Quando o motor é de grande capacidade e / ou nutrido a partir de um sistema baixo, um determinado dispositivo inicial se torna necessário para reduzir a corrente de partida. Nessas aplicações, não importa se a redução na corrente de partida é acompanhada por uma redução no torque inicial.
Quando o torque de carregamento durante o início -ups é alto ou a inércia de carga é importante, o início do processo de treinamento do motor de indução leva muito tempo. Se o motor estiver carregando uma corrente significativa durante o início -up, ele será danificado devido ao superaquecimento. Portanto, o motor não pode ser iniciado diretamente online.
Nesses casos, são utilizados os métodos de partida -UP que permitem uma diminuição na corrente de partida sem diminuição do torque de partida. Em algumas aplicações, pode ser necessário um aumento no torque de partida acompanhado por uma diminuição na corrente de partida.
Em um mecanismo de gaiola de esquilo, certas medições para melhorar o desempenho inicial podem. Ser tomado no estádio de design, como no caso de motores de gaiola de esquilo alto e com uma barra profunda e uma gaiola dupla. Se necessário, os métodos usados para iniciar os motores com a gaiola de esquilo são:
- Star-Delta Starter
- Iniciado automático do transformador
- Partida do reator
- Iniciar o reator saturável
- Parte de parcialmente
- Starter do controlador de tensão CA
- O iniciador de resistência ao rotor é usado para iniciar o motor do rotor da ferida:
Os métodos (1) – (5) e (7) são descritos aqui e o método (6) em seco. 6.11.
Iniciante de estrela-delta:

Neste método, um mecanismo de indução projetado para operar normalmente com a conexão Delta é conectado como uma estrela durante o início -up. Isso reduz a tensão do estator e a corrente em 1 / √3.
Como o torque do motor é proporcional ao quadrado da tensão do terminal do estator, o torque de início -up é reduzido para terceiros. Um circuito para startup de estrela-delta é ilustrado na Figura 6.7. Os disjuntores CBM e CD estão fechados para iniciar a máquina com a conexão de estrela. Quando a velocidade permanente é atingida, a CBS está aberta e o CBR é fechado para conectar a máquina no delta.
Iniciar o Starter do Transformador Automático:
Uma tensão reduzida para o início -up também pode ser obtida de um transformador automático. Para uma volta secundária para a volta primária, a tensão do terminal do motor e a corrente do estator são reduzidas por AT. Isso reduz a corrente extraída da fonte de alimentação por A2T.
Como o torque é proporcional ao quadrado de tensão do terminal do motor, ele também é reduzido por A2T. Depois que o motor é acelerado, ele está conectado à tensão de energia total. Um circuito de partida do transformador automático é ilustrado na Figura 6.8 (a). Primeiro, o CBS1 é fechado seguido pelo CBS2.
Quando o motor acelerou a toda velocidade, o CBS2 está aberto e o CBM fechado. O CBS1 agora está aberto para desconectar o auto-transformação alimentar.
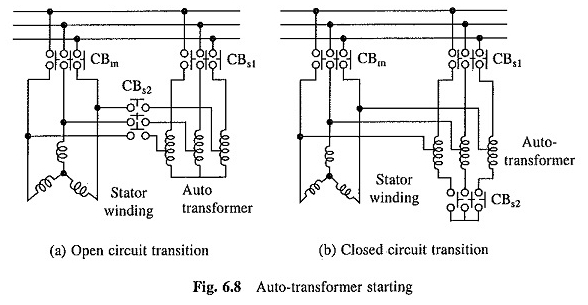
Transição de circuito fechado:
Nos métodos de inicialização de estrela-delta e auto-transformador, a passagem de baixa tensão para a conexão de tensão total perturba o fluxo de corrente do estator e o campo do estator entra em colapso. A corrente do rotor continua a fluir devido ao seu grande tempo constante.
O campo produzido pelas correntes do rotor induz tensões nos enrolamentos do estator. A fase de tensão induzida é independente das tensões de alimentação. Uma grande corrente de corrente é produzida no momento da reconexão quando induzida e as tensões de oferta estão fora de fase.
Quando a corrente não é aceitável, a transição de circuito fechado é usado. Um esquema de transição de circuito fechado para um iniciador automático do transformador é ilustrado na Figura 6.8 (b). Ele usa três disjuntores: CBS1, CBS2 e CBM.
O primeiro CBS2 está fechado para fechar a conexão Star Point Auto-Transformator. CBS1 está fechado depois. Isso completa a conexão de baixa tensão do auto-transformação e o motor inicia. Quando a velocidade é atingida, o circuito do circuito CBS2 está aberto.
O motor agora funciona com a parte superior dos enrolamentos de fase do transformador automático em série com o estator. Os enrolamentos simplesmente funcionam como reatores em série. A partir de agora, o CBM do disjuntor está fechado, que ignora os reatores da série e conecta o motor diretamente à fonte de alimentação.
No início do início alternadamente, o primeiro CBS1 está fechado em vez de CBS2. Em seguida, o motor e o transformador não produzem simultaneamente a sobretensão da corrente magnetizante.
Iniciante do reator:
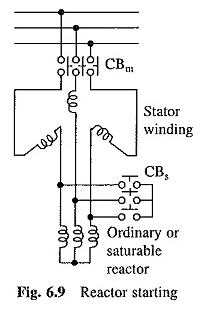
A corrente de início -up também pode ser reduzida conectando um reator de três fases em série com o Stator.
Quando o motor atinge a velocidade máxima, o reator é ignorado. A Figura 6.9 mostrou esse diagrama. O CBM está fechado para iniciar a máquina. Quando a velocidade máxima é atingida, a CBS está fechada para o curto-circuito, o reator. É vantajoso conectar o reator à extremidade neutra do enrolamento do estator.
Isso minimiza sua classificação de tensão e também mantém sua tensão e a tensão CBS do disjuntor com potencial neutro durante a operação do motor normal.
Início do uso suave do reator Satuble:
Em algumas aplicações, o torque inicial deve ser verificado sem passo. Por exemplo, em máquinas têxteis, ele deve ser variado com cuidado, caso contrário, os fios da fibra quebrarão durante o início -up. Esse arranjo de partida é chamado de início suave -Up.
O diagrama do controlador de tensão do tiristor agora é amplamente utilizado para iniciar -Up. Um certo número de discos existentes também usa um acionador de partida de reatores satisfatório, no qual um reator de três fases é conectado em série com o estator. O reator de saturação possui um enrolamento de controle de DC.
A reatância do reator satuble pode variar sem passo modificando a corrente do enrolamento de controle. Para Start -Up, a reatância é definida inicialmente ao valor mais alto. O torque de início -up é próximo a zero. A reatância agora é reduzida suavemente aumentando a corrente do enrolamento de controle.
Isso dá uma variação sem o estágio do torque inicial. Portanto, o motor começa sem se afastar e acelerar suavemente.
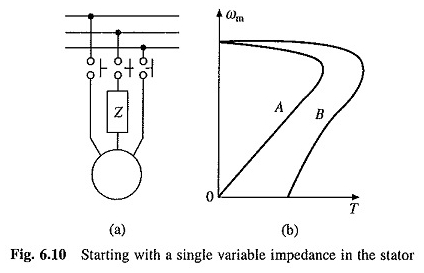
Diagrama de partida desequilibrado para começar flexível:
Para Iniciar -Up sem função, uma alternativa mais barata mostrada na Figura 6.10 (a) também pode ser usada. Consiste em uma impedância z variável em uma das fases da máquina.
Quando a impedância é muito alta, a máquina opera com uma única fase e sua característica de plotagem de velocidade é semelhante à característica da Figura 6.10 (b), com um torque de partida zero.
Quando a impedância é completamente removida, a curva de torque de velocidade é semelhante à característica B, que é a característica natural da máquina. Para valores de impedância intermediária, a curva de velocidade de velocidade é entre as curvas A e B.
Um início de fluido, sem choque, é alcançado quando a impedância é controlada sem passo. A impedância pode ser uma resistência variável ou um reator satável de fase única.
O motor trabalha com tensões de estator desequilibradas; portanto, as perdas de cobre estão aumentando. Assim, este diagrama é adequado apenas para uma operação curta.
Início da parte do enrolamento:
Alguns motores de gaiola de esquilo têm dois ou mais enrolamentos do estator que são conectados em paralelo durante a operação normal. A princípio, um único enrolamento está conectado. Isso aumenta a impedância do estator e reduz a corrente de partida. Esse esquema inicial é chamado de início do jogo.
Sua implementação para uma máquina com dois enrolamentos do estator é ilustrada na Figura 6.11. A máquina começa com o enrolamento 1 quando o CBM é fechado. Uma vez concluído a velocidade, a CBS está fechada para conectar o enrolamento 2.

Iniciante de resistência ao rotor:
Os motores do rotor das feridas são geralmente iniciados pela conexão de resistores externos no circuito do rotor (Fig. 6.12 (a)). O maior valor de resistência é escolhido para limitar a corrente a uma velocidade zero na aposta segura.
À medida que o motor acelera, as seções da resistência externa são cortadas uma a uma fechando os contatos C1, C2 e C3, a fim de limitar a corrente do rotor entre os valores máximo e mínimo especificados (Fig. 6.12 (b)).

Como a maior parte da perda de cobre do rotor ocorre em resistências externas, o aumento da temperatura do rotor durante o início -Up é significativamente menor em comparação com os métodos iniciais descritos acima.
A característica importante desse método de partida no motor de indução é que o torque de partida e a proporção de torque / corrente são altos.
Portanto, é adequado para aplicações que requerem aceleração rápida, partidas e paradas frequentes, começando com uma carga intensa e começando com uma alta carga de inércia.
Enquanto o torque máximo é independente do valor da resistência ao rotor (Eq. (6.13)), a velocidade na qual o torque máximo é produzido pode ser controlado modificando o valor dos resistores externos (Eq. (6.12)). Os resistores externos podem, portanto, variar para acelerar a máquina com torque máximo.