Motor de indução Drive alimentado com o inversor do inversor:
Leitor de mecanismo de indução alimentado na fonte atual – em um inversor de fonte de tensão, o motor de indução alimentado com indução, a tensão aplicada ao estator é proporcional à frequência, com uma correção para a queda de resistência do estator, em particular em baixa velocidade, para manter o fluxo constante.
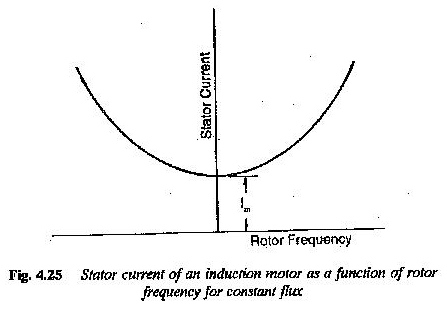
É um fato bem conhecido que a corrente desenhada por um mecanismo de indução não depende da frequência do estator quando o fluxo do espaço aéreo é constante. Existe uma relação fixa entre a frequência de deslizamento e a corrente do estator para o fluxo nominal no espaço aéreo, como mostrado na FIG.
4.25. Ao controlar o deslizamento do motor, a corrente do estator pode ser verificada. Portanto, é possível o controle de fluxo indireto. O controle é mais simples que o controle de tensão. A curva entre a frequência de deslizamento e a corrente do estator pode ser calculada usando o circuito equivalente. Um inversor PWM pode ser verificado para fornecer as correntes desejadas no motor.
Em um conversor de ligação CC, se a corrente de conexão CC for verificada, o inversor será chamado de inversor de origem atual. A corrente no link CC é mantida constante por uma alta indutância e a capacidade do filtro é distribuída.
A tensão variável de ligação ao CC é convertida em um motor de indução alimentado ao inversor do inversor na fonte atual por meio de indutância. A oferta da DC é de grande impedância.
Como a corrente de conexão é mantida constante, a forma de onda de corrente de saída é determinada pela operação do inversor, enquanto a tensão de saída é determinada pela natureza da impedância da carga.
Um motor de indução alimentado com o inversor atual no inversor atual é adequado para cargas que têm baixa impedância com correntes harmônicas e unidade PF
Um motor de indução alimentado com o inversor atual tem uma configuração muito simples. Não são necessários diodos de feedback. Um retificador controlado na fase é usado na lateral da linha para fornecer controle atual.
Como o link CC contém apenas indutância, a regeneração é possível modificando a polaridade das tensões e mantendo a direção da corrente. Portanto, um leitor de quatro quadrantes é simples e simples.
Ele fornece tempestade buffer eficaz da saída do inversor das variações de tensão de alimentação. O controle direto da corrente do estator possibilita a implementação de um controle preciso de loop fechado com relativa facilidade.
A comutação do inversor depende da carga. Os parâmetros de carga fazem parte do circuito de comutação. Portanto, é necessária uma correspondência entre o inversor e o motor. A operação multimotora não é possível.
O inversor deve necessariamente ser uma força comum, porque o mecanismo de indução não pode fornecer o poder reativo do inversor.
A corrente de conexão CC constante pode fluir através das fases do motor controlando o inversor e, portanto, a corrente do motor é uma onda quase carré. A tensão do motor é quase sinusoidal com pontos de beliche, devido à comutação.
Esses picos de tensão decidem sobre a avaliação da tensão dos thvristores e também afetam o isolamento do motor. Esses pontos podem ser limitados se a máquina tiver uma pequena reatância de vazamento ou se os capacitores de comunicação forem grandes.
Uma máquina com uma reatância de vazamento menor é adequada para a operação do mecanismo de indução do inversor do inversor da fonte atual para manter os picos de tensão e as perdas harmônicas, pelo menos. O efeito das pulsações de torque diminui e a frequência operacional pode ser aumentada.
A capacidade de comutação é escolhida para comprometer entre as dicas de tensão e a maior frequência operacional. A comutação requer uma corrente mínima final. O inversor tem a capacidade de se recuperar de uma falha de comutação.
A indutância da conexão causa um aumento lento na corrente de falha e, quando atinge valores altos, o defeito pode ser eliminado.
O leitor apresenta problemas de estabilidade em cargas leves. A operação do loop aberto não é possível. Possui uma ampla gama de controle de velocidade, mas o desempenho dinâmico é ruim.
O motor de acionamento requer estreitamento devido a perdas harmônicas e aquecimento associado. As pulsações de torque estão presentes e sua amplitude é grande em baixa frequência de operação, devido aos harmônicos adicionais no fluxo do rotor. O fator de potência da linha é ruim, devido ao controle de fase.
Até a frequência nominal, o leitor está no modo de torque constante e acima da frequência nominal de que o leitor esteja no modo de energia de cavalos constantes.
A corrente do estator de um motor de indução operando em uma frequência variável, a fonte de alimentação de tensão variável é independente da frequência do estator se o fluxo da forma do ar for mantido constante. No entanto, depende da frequência do rotor.
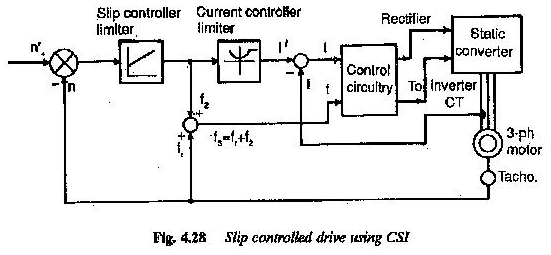
O torque desenvolvido também depende apenas da frequência do rotor. Usando essas características, um leitor controlado deslizante (Fig. 4.28) pode ser desenvolvido usando um inversor de origem corrente para fornecer um mecanismo de indução.
A relação entre a frequência do rotor e a corrente do estator para o fluxo nominal no AeroGAP é introduzida no controle. Assim, o controle de fluxo indireto é possível. A saída do gerador de funções fornece o valor de referência da corrente.
A corrente medida é comparada ao valor de referência e o erro é usado para modificar o ângulo de disparo do conversor verificado na lateral da linha.
A entrada do gerador de funções é a diferença entre a velocidade de referência e a velocidade real e pode ser considerada como uma frequência deslizante que é adicionada à frequência correspondente à velocidade do rotor, que fornece o valor da frequência do estator e o inversor no lado da máquina é controlado para fornecer essa frequência.
O controle está operacional até que o rotor atinja a velocidade desejada com a frequência de deslizamento necessária.
O leitor controlado pela Slide apresenta as seguintes vantagens:
1. O leitor de deslizamento controlado é muito eficaz.
2. O controle preciso do torque é possível em uma ampla faixa de velocidade.
3.A frequência de deslizamento pode ser qualquer valor para o valor correspondente ao torque de falha. A operação é um fator de potência muito bom. A operação é muito estável.
4.O rotor pode ser acelerado para um torque constante e informado, mantendo a frequência do rotor por um valor apropriado. Aceleração rápida.
5.com que isso leva ao início suave de que o motor não vê as correntes do rotor bloqueadas e os escorregadores de tensão associados não estão lá.
6. Rotores especiais com torque inicial alto não são necessários. Rotores com baixa resistência podem ser usados para que as perdas sejam limitadas.
7. A frenagem regenerativa pode ser incorporada. A frenagem para um torque constante é possível.
8. O leitor tem uma eficiência comparável a um jogador de CC tiristorizado.
As vantagens adicionais dos mecanismos de indução da gaiola de esquilo, como a alta taxa de potência / peso, menos manutenção, uma baixa inércia, sem limitação nas faixas de potência e nas faixas de velocidade, fazem do deslizamento controlar o disco um concorrente real para os leitores do mecanismo DC.
Métodos de eliminação harmônica selecionados ou princípios de PWM podem ser usados para reduzir os efeitos dos pulsos de torque, especialmente em baixa velocidade.
Nesses métodos, o controle pode ser obtido controlando a corrente de conexão CC e o princípio do PWM pode ser usado apenas para controlar o conteúdo harmônico da forma da onda atual.
Essa separação das funções de controle atual e harmônica permite a escolha da estratégia de controle do PWM, o que só melhorará as pulsações do torque do motor e reduzirá as perdas harmônicas.
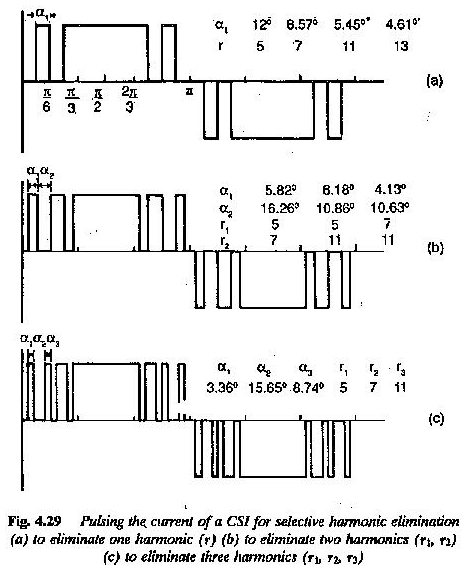
A maioria das estratégias de PWM para um mecanismo de indução no inversor da fonte atual é baseada em técnicas de eliminação harmônica selecionadas.
Eles são usados para eliminar os harmônicos do estado da corrente do estator e os métodos causam a eliminação de ondulações de torque mais baixas (Fig. 4.29).
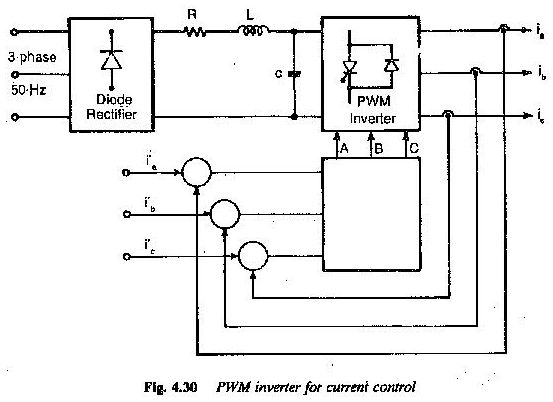
Nos últimos anos, as estratégias de PWM foram desenvolvidas especialmente para minimizar a ondulação da velocidade do rio devido à pulsação do torque, para causar treinamento com rotação suave em baixa velocidade (Fig. 4.30).
As características gerais do mecanismo de indução nutridas com o inversor do inversor atual podem ser resumidas da seguinte forma:
1. Download de comutação dependente: Como os parâmetros de carga fazem parte do circuito de comutação, o inversor e o motor devem ser aparecendo.
2. O inversor possui uma configuração simples. FWDs estão ausentes.
3. Uma operação única do motor
4. O link CC contém apenas indutância. Para manter uma corrente constante, deve ser muito importante. A operação de dois quadrantes é simples
5. Aumento, é necessário um retificador controlado na fase na lateral da linha. A tensão variável de ligação ao CC é convertida em uma fonte constante de corrente por meio de uma alta indutância de ligação.
6.O inversor é forçado a fornecer correntes de frequência variáveis para alimentar o motor.
7.O valor da capacidade é um compromisso entre os picos de tensão e a maior frequência operacional. A capacidade é maior, a tensão é menor, a maior frequência operacional também é limitada.
8. A reatância dos vazamentos do motor influencia as tensões harmônicas. Ele também é responsável pelos picos de tensão durante a troca.
A reatância de vazamentos é um parâmetro do circuito de comutação, determina o tempo de comutação e, portanto, a maior frequência operacional é limitada.
Um motor deve ter uma reatância de vazamento menor para reduzir as tensões harmônicas e os picos de tensão e aumentar a faixa de controle de velocidade. Os picos influenciam a avaliação do tiristor e afetam o isolamento. O tamanho do motor se torna maior se a reatância de vazamentos for pequena.
9. Os tiristores de qualidade do conversor são suficientes. O uso do tiristor é bom
10. Os canhadores se recuperam da falha da troca. A indutância da conexão causa um aumento lento na corrente de falha e, quando atinge o alto valor, pode ser excluído.
11. É um problema de estabilidade de carga leve. Uma corrente mínima deve estar lá para alternar.
12. Os recursos do loop operacional não são possíveis. A resposta dinâmica é lenta
13.A linha PF é medíocre devido ao controle de fase.
14.Encontre o aplicativo como médio a alto treinamento
15. Os pulsos causam oscilações de velocidade em velocidades muito baixas. As estratégias de PWM são usadas para remover oscilações de velocidade e tornar a operação sem problemas.
16.Este torque constante e as operações de energia de cavalos constantes são possíveis.