Motor de indução Mudança de pólo:
Mudança do pólo do motor de indução – Para uma determinada frequência, a velocidade síncrona é inversamente proporcional ao número de pólos. Velocidade síncrona e, portanto, a velocidade do motor pode ser modificada modificando o número de pólos.
As disposições para modificar o número de pólos devem ser incorporadas ao estágio de fabricação e essas máquinas são chamadas de “motores de troca de pólo” ou “vários motores de velocidade”.
O rotor da gaiola do esquilo não é enrolado para um número específico de pólos. Produz o mesmo número de pólos que o enrolamento do estator. Portanto, em um mecanismo de gaiola de esquilo, uma provisão é necessária apenas para modificar o número de pólos no estator.
No motor das feridas, também é necessário o layout para modificar o número de pólos no rotor, o que complica a máquina. Portanto, essa mudança de pólo do método de controle do motor de indução é usada apenas com motores de gaiola de esquilo.
Um arranjo simples, mas caro, para modificar o número de postes do Stator é usar dois enrolamentos de estator separados, que são enrolados para dois números de pólos diferentes. Uma alternativa econômica e comum é usar um único enrolamento do estator dividido em algumas coels de bobinas.
O número de pólos é modificado modificando as conexões desses grupos de bobinas. Teoricamente, dividindo o enrolamento em vários grupos de bobinas e deixando os terminais de todos esses grupos, um certo número de pólos pode ser obtido reconectando esses grupos.
Na prática, por simplicidade, o enrolamento é dividido apenas em dois grupos de bobinas. Isso permite a mudança de número do pólo por um fator 2. Um arranjo de enrolamento para este caso em particular é explicado da seguinte forma:
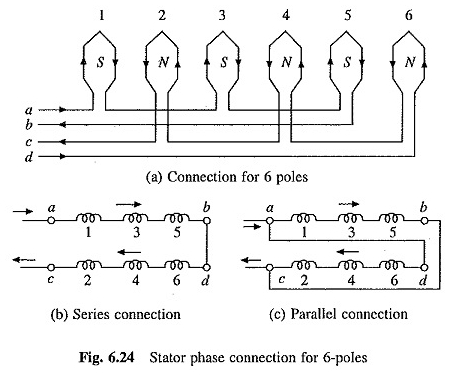
A Figura 6.24 (a) mostra um enrolamento de fase composto por 6 bobinas divididas em dois grupos AB compostos por bobinas incomuns numeradas (1, 3, 5) conectadas em bobinas padrão e CD de uniformes (2, 4, 6) conectadas em série.
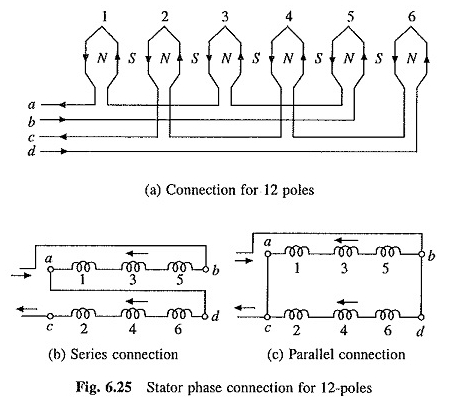
As bobinas podem ser projetadas para transportar a corrente nos dados fornecidos conectando as coels de bobinas em série ou em paralelo, ilustradas com a Fig. 6.24 (b) e (c), respectivamente. Com esta conexão, a máquina de 6 póis. Se a corrente através das bobinas do grupo AB for revertida (Fig. 6.25 (a)), todas as bobinas produzirão pólos do norte. F
Os luxos que saem desses poloneses do norte agora encontrarão o caminho através dos espaços entre plataformas para sair, produzindo, portanto, os pólos do sul em inter-plays. Assim, a máquina agora terá 12 faixas.
Aqui, novamente, a direção necessária da corrente através das bobinas pode ser obtida conectando as duas seções AB e CD em série ou em paralelo, conforme indicado na Figura 6.25 (b) e (c).
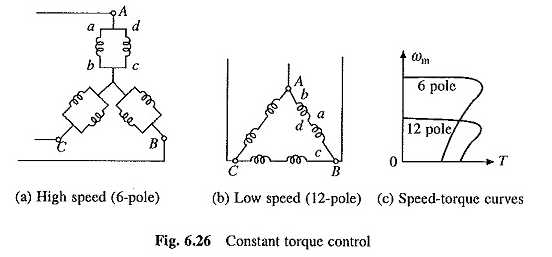
Assim, cada fase do enrolamento da máquina possui dois grupos de bobinas, AB e CD, que podem ser conectados em série ou em paralelo para os dois pólos 6 e 12.
Além disso, três fases da máquina podem ser conectadas para formar uma conexão delta ou estrela.
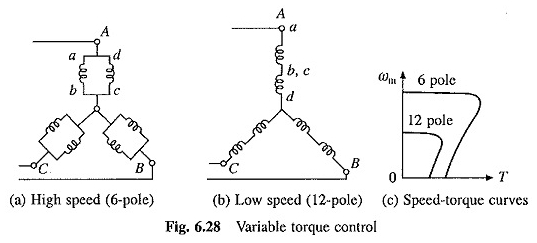
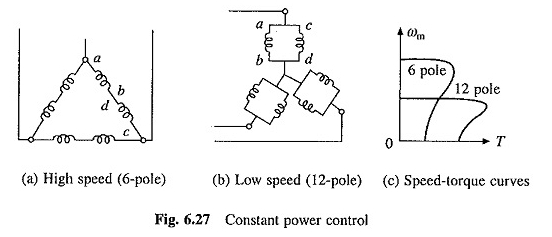
Ao escolher uma combinação apropriada de conexões seriais ou paralelas entre os grupos de bobina de cada fase e a conexão estrela ou delta entre as fases, a mudança de velocidade pode ser obtida com uma operação de torque constante, uma operação de energia constante ou uma operação de torque variável. As conexões e as curvas da velocidade chave para essas operações são representadas nas Figs. 6.26 a 6.28.