Motor de indução do rotor de feridas com cascata de conversor sub-síncrono no circuito do rotor:
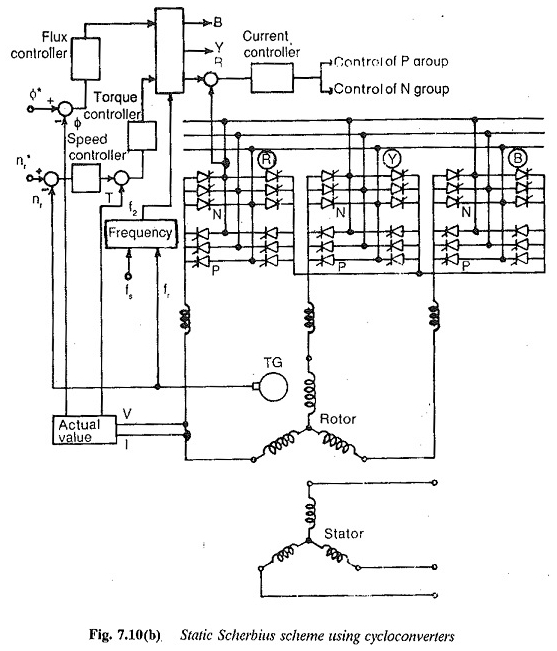
Os pontos a seguir promovem a aplicação de um motor de anel deslizante com um diagrama de recuperação de energia deslizante estática no circuito em cascata do conversor sub-síncrono, para acionar uma bomba centrífuga (Fig. 7.10).

1.O controle da taxa de entrega da bomba é concluído pelo controle de velocidade da bomba. O controle de velocidade do motor é realizado recuperando a energia deslizante para o setor.
O sistema não tem perdas de deslizamento, ou seja, as perdas ocorrem devido à queda na velocidade; portanto, o requisito de energia do leitor é acionar a carga, mais o mecanismo de indução da raiz da ferida com perdas de conversor e sub-síncrono. Com base no consumo de energia, o sistema é preferido porque é muito eficaz.
2. É possível um controle sem etapa muito fluida, para evitar sobretensões do sistema hidráulico devido à ativação da bomba ON e desativada
3. Capacidade de projeto do conversor estático; A vantagem do motor de indução do rotor de feridas com uma cascata de conversor subsíncrono no rotor de um motor de indução no conversor nutrido do estator é que a cascata do conversor estático não precisa ser observado para uma nota completa do motor.
A notação do conversor depende da faixa de controle de velocidade exigida abaixo da velocidade síncrona.
Como a faixa de velocidade é limitada a 30 a 50%, a cascata do conversor também deve ser avaliada por 30 a 50% do total, mas o conversor deve ser projetado para projetar que seja capaz de liderar a corrente mais alta possível em alta velocidade e com a maior tensão possível na velocidade mais baixa.
Para fazer isso, a classificação de projeto real do motor de indução do rotor da ferida com o conversor da subcrera é um pouco maior que a potência deslizante.
Como a corrente mais alta e a tensão mais alta não ocorrem simultaneamente, o projeto do motor de indução do motor da ferida com um conversor sub-síncrono pode ser reduzido pelos interruptores.
4.INTS: O início suave -up do motor é possível. O torque pode ser regulado usando a corrente de conexão em cascata. Os picos atuais de partida não estão lá.
5.Perência e flexibilidade: o sistema aumentou a segurança operacional e oferece disponibilidade flexível da instalação.
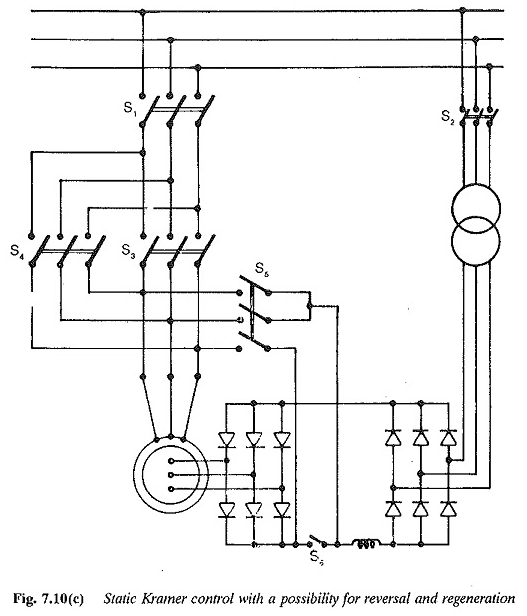
No caso de falha do conversor em cascata e em qualquer outra condição de emergência, é possível executar o motor com um controle de velocidade por meio da variação na resistência do rotor usada para iniciar. No entanto, a resistência ao rotor deve ter sido projetada para servir as duas obras.
Essa possibilidade não existe com outros sistemas. Há outra flexibilidade operacional no uso de um mecanismo de indução do rotor da ferida com um conversor subsíncrono. Uma determinada unidade pode ser usada com vários motores de indução e, portanto, menos cascatas de conversor que as bombas podem ser usadas.
Isso é possível se não todas as bombas exigirem controle de velocidade ao mesmo tempo. Somente essa bomba que requer um controle de velocidade é usada com a cachoeira e a bomba que não requer controle de velocidade é usada com um motor de indução normal.
A bomba a ser regulada pode ser escolhida à vontade e, portanto, a instalação tem um controle muito flexível.
6.O sistema pode ser desenvolvido para todas as faixas de fornecimento e velocidades da bomba centrífuga. A velocidade mais alta disponível é de 1800 rpm e, em casos excepcionais, isso pode ser estendido a 3600 rpm.
A cascata do conversor da sub-tela é maior que os motores de corrente direta alimentados pelo conversor em comparação com esse critério. No entanto, é menor que os conversores alimentados com motores síncronos disponíveis para velocidades de até 6000 rpm.

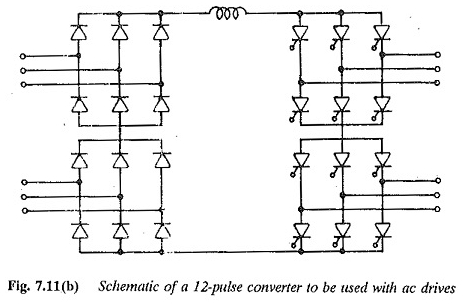
7. Para melhorar o desempenho, são feitas as seguintes alterações no desenvolvimento do conversor. Um conversor de 12 pulsos (Fig. 7.11) pode ser usado para reduzir a amplitude de casais pulsantes e perdas harmônicas no motor.
O inversor de 12 pulse possui apenas harmônicos de ordem superior e a distorção da tensão da linha será pequena. Os casais pulsantes são afetados pelo número de impulsos do retificador.
O arranjo dos 12 pulsos do inversor diminui a pulsação do torque, reduzindo a corrente do estator e a distorção de tensão. 12 inversores de pulso são necessários se a avaliação do curto-circuito do setor for menor que a do motor.
Também é necessário se a linha for tal que os harmônicos do inversor sejam capazes de causar distorção
8. A principal desvantagem das cachoeiras do conversor é um fraco fator de potência devido ao controle de fase do on -line na linha. Métodos foram desenvolvidos para melhorar o fator de potência. Um desses métodos é o controle seqüencial do inversor na lateral da linha. A operação seqüencial melhora o fator de potência, exigindo potência reativa reduzida.
Conversor alimentado com motor síncrono para bombas centrífugas
O motor síncrono nutrido para o conversor atende a todos os critérios discutidos acima e tem uma aplicação na condução de bombas centrífugas. Comparado ao rotor do anel deslizante com a cascata de conversor, ele tem vantagens de:
- Velocidade operacional mais alta até 6000 rpm
- O conversor simples devido à comutação da máquina (com assistência de comutação apenas em baixa velocidade)
- O fator de potência da linha é melhor que o conversor em cascata
- As características da partida suave e a possibilidade de atingir o treinamento sem equipamentos ao mesmo tempo em velocidades muito baixas e altas.