Motores de indução de três fases:
Os motores de indução de três fases são de dois tipos: a caixa de esquilo e o rotor das feridas.
Na gaiola do esquilo, o rotor consiste em barras de motorista longitudinal curto-circuitado por conectores circulares nas duas extremidades, enquanto no motor do rotor da ferida, o rotor também possui um enrolamento trifásico equilibrado com o mesmo poste que o enrolamento do estator. No entanto, em ambos, o estator usa um enrolamento distribuído de três fases.
Análise e desempenho:
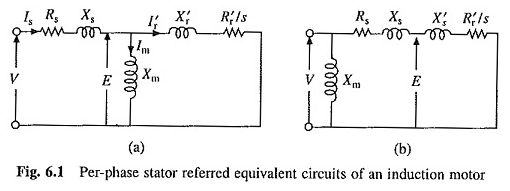
O circuito equivalente por fase de um mecanismo de indução de três fases é representado na Figura 6.1 (a). R′R e X′R são os valores referidos do estator da resistência do rotor RR e a reatância do rotor XR. A mudança é definida por

onde ωm e ωms são rotor e velocidades síncronas, respectivamente. Avançar

onde F e P são a frequência alimentar e o número de pólos, respectivamente.
Como a queda do estator na impedância é geralmente insignificante em comparação com a tensão V terminal V, o circuito equivalente pode ser simplificado ao mostrado na Figura 6.1 (b).
Também da equação. (6.1)
![]()
Na Figura 6.1 (b),

Energia transferida para o rotor (ou energia aérea)
![]()
A perda de cobre do rotor é
![]()
Energia elétrica convertida em energia mecânica

Torque desenvolvido pelo motor
![]()
Substituindo equações. (6.3) e (6.7)

Substituindo da equação. (6.4) dá
Uma comparação de equações. (6.5) e (6.9) sugerem que

O torque de saída do motor na árvore é obtido pela dedução de casais de desvio de atrito e núcleo do núcleo do torque desenvolvido.
O torque desenvolvido depende apenas do deslizamento (Eq. (6.10)). A diferenciação de T em (6.10) em relação a S e assimilar a zero dá a mudança para um torque máximo 
Substituindo da equação. (6.12) em (6.10) fornece uma expressão para o torque máximo

O torque máximo também é conhecido como torque de falha. Embora seja independente da resistência ao rotor, o SM é diretamente proporcional à resistência ao rotor.
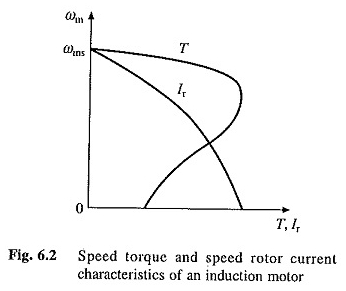
As naturezas das características de velocidade e velocidade são representadas na Figura 6.2. A corrente do rotor e o torque são zero na velocidade síncrona. Com uma diminuição na velocidade, ambos aumentam.
Enquanto o casal reduziu após atingir o valor de quebra, a corrente do rotor continua aumentando, atingindo o valor máximo em velocidade zero. A queda na velocidade da carga completa depende da resistência do rotor.
Quando a resistência do rotor é baixa, a queda é bem pequena e, portanto, o motor opera principalmente a uma velocidade constante. O torque de falha é uma medida da capacidade de sobrecarga de torque de curto prazo do motor.
O motor opera na direção do campo rotativo. Direção do campo rotativo e, portanto, a velocidade do motor pode ser revertida revertendo a sequência de fases. A sequência de fases pode ser revertida trocando dois terminais do motor.
Às vezes, o torque é expresso em termos de SM e TMAX, o que não apenas facilita os cálculos, mas também permite uma rápida apreciação da natureza das características da velocidade de velocidade. Divida a equação. (6.10) por (6.13) e substitua os rendimentos (6.12)
A natureza das características da velocidade de velocidade (Fig. 6.2) agora pode ser facilmente explicada pela equação. (6.14).
Para mudanças muito menores que SM, o segundo termo do denominador domina. Portanto, a relação de velocidade de velocidade de 0 ao torque nominal é aproximadamente representada por uma linha reta.
Para slides muito maiores que o SM, o primeiro mandato do denominador domina e a relação de plotagem de velocidade assume uma forma hiperbólica nessa região.
Em todo o motor da operação do motor, o termo (RSSM / R′R) é pequeno em comparação com 1 e, finalmente, dominante no denominador. Portanto, pode ser excluído da equação. (6.14). Então

Motores de indução com projetos especiais:
Um mecanismo de indução para uso geral foi projetado para operar com slide com baixo teor de carga, a fim de ter um bom desempenho de corrida. De acordo com a nota, a carga completa varia de 2 a 7%.
Esse motor possui uma alta corrente de inicialização (5-8 vezes) e um torque de partida baixo (carga total no torque de carregamento de carregamento total dos ingressos). Algumas aplicações exigem que o motor seja projetado de maneira diferente. Alguns deles são:
Motores de indução de alta escalada:
Para aplicações de carregamento intermitentes, envolvendo START -UP e STOP e / ou opere frequente em baixa velocidade por períodos prolongados, os motores de indução são projetados com alta resistência ao rotor.
Esses motores têm uma corrente de partida baixa e um alto torque de partida -up, mas baixa eficiência de carga total devido a uma alta perda de cobre do rotor. Como esses motores operam em um grande turno (entre 10 e 40% em carga total), eles são chamados de motores deslizantes com alto teor.
Os motores deslizantes altos também são adequados para o treinamento dos ventiladores, onde a velocidade é controlada controlando a tensão do estator e estão entre os dois quadrados e rotor da ferida. A natureza das características da velocidade de tiro desses motores é representada na Figura 6.3 (c).
Nos mecanismos de indução dos casos de esquilo, o bom desempenho inicial (baixa corrente de partida e alta torque de partida) é feita sem afetar significativamente o desempenho de carga total usando barras profundas ou motores de rotor de gaiola dupla.
A frequência do rotor vai de 50 Hz a 1-3 Hz, à medida que a velocidade passa da parada em carga total: a variação na frequência do rotor é usada nesses motores para variar a resistência ao rotor de alto valor na parada em um valor muito pequeno em velocidade máxima.
Assim, embora o desempenho inicial e de baixa velocidade seja aprimorado, o desempenho total de carga não é realizado significativamente.
Motor de indução de vice -esquilo:
O estator da máquina é idêntico a um mecanismo de indução para uso geral. O rotor possui barras de motorista profundas e estreitas, como mostrado na Figura 6.3 (a).
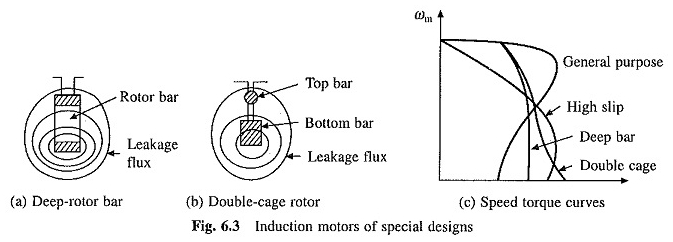
Os fluxos de vazamento de slot produzidos pela corrente na barra também são ilustrados na figura. Pode -se imaginar que a barra é feita de um certo número de camadas estreitas conectadas em paralelo. Vamos comparar o comportamento das camadas superior e inferior.
Mais links de fluxo de vazamento com a camada inferior do que a camada superior. Consequentemente, a camada inferior tem uma indutância de vazamento muito maior que a camada superior. Como a frequência do rotor é alta em baixa velocidade, a reatância e a impedância da camada inferior são muito maiores que a camada superior.
Consequentemente, em baixas velocidades, a maior quantidade de corrente é transportada pela camada mais alta e mais baixa na parte inferior. Devido à distribuição desigual da corrente através da seção transversal da barra, uma resistência efetiva do rotor é alta e o desempenho inicial -up e em baixa velocidade é melhorado.
Em uma velocidade de carga quase total, a frequência da corrente do rotor e a reatância de vazamentos são baixas. Consequentemente, a corrente também é distribuída pela seção transversal da barra e a resistência efetiva do rotor tem um valor baixo. Assim, o desempenho da carga total não é significativamente afetada. A natureza da curva de velocidade do motor é representada na Figura 6.3 (c).
Motor de indução do rotor de esquilo duplo:
O rotor consiste em duas camadas de barras de motorista em cada fenda (Fig. 6.3 (b)) curto-circuito por anéis finais. A barra superior possui uma seção transversal menor que a parte inferior. Portanto, tem maior resistência.
A barra inferior está ligada a uma quantidade maior de fluxos de vazamento que a barra superior e, portanto, possui uma indutância mais alta. Em baixa velocidade, para a qual a frequência do rotor é alta, a barra inferior tem uma impedância mais alta. Portanto, mais corrente atravessa a barra superior.
Como a resistência da barra superior é obtida do bom desempenho de início. Em altas velocidades, para as quais a frequência do rotor é baixa, a barra inferior tem uma impedância muito menor que a superior.
Consequentemente, a corrente do rotor é transportada principalmente pela barra inferior e o desempenho total da carga permanece bom porque eles têm baixa resistência. A natureza das características da velocidade da engrenagem é representada na Figura 6.3 (c).
Motor de torque:
Os motores projetados para operar por longos períodos em uma condição em uma parada ou em baixa velocidade são chamados de motores de torque. Eles foram projetados para desenvolver o torque desejado com baixa velocidade em baixa velocidade.
Suas características de velocidade são moldadas para ter uma inclinação negativa, de modo a fornecer operação estável com a maioria das cargas de baixa velocidade. Eles podem ser um tipo de ferimento de esquilo ou rotor. Motores de indução PIPhanted e motores de fase única estão disponíveis.