Princípio do mecanismo de indução | Característica deslizante de torque:
O princípio do motor de indução não foi introduzido até agora. Considere uma máquina de rotor cilíndrica com o estator e a ferida do rotor para três fases e o número idêntico de pólos, como mostra a Figura 5.40.
Vamos inicialmente supor que o rotor do rotor esteja no circuito aberto e deixe o estator ser conectado a um barramento infinito (v, f).
As correntes do estator instalaram um campo magnético rotativo no espaço de ar que funciona a uma velocidade síncrona induzindo um EMF no enrolamento do estator, que equilibra a tensão do terminal, assumindo que a resistência do estator e a reatância dos vazamentos são insignificantes.
O campo rotativo também induz o EMF no enrolamento do rotor, mas nenhuma corrente do rotor circula porque o rotor está no circuito aberto. A frequência dos EMFs do rotor é obviamente f. Como o rotor mmf f2 = 0, nenhum casal é desenvolvido e o rotor continua a ser estacionário.
O princípio do motor de indução atua simplesmente como um transformador em que o estator (primário) e o rotor (secundário) têm EMFs da mesma frequência que são induzidos nele pelo fluxo magnético rotativo, e não por um fluxo que varia no tempo como em um transformador comum.
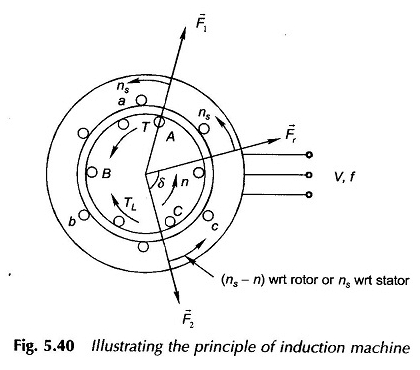 Que o rotor agora é mantido estacionário (bloqueado a partir da rotação) e o enrolamento do rotor é curto-circuito. O rotor agora carrega correntes atuais, criando o MMF F2 girando na mesma direção e com a mesma velocidade que o campo do estator. F2 circula as correntes de reação no estator da barra de barramento (como em um transformador comum), de modo que o fluxo / pólo φR do fluxo resultante da densidade de fluxo (girando a caminhada do ar em velocidade síncrona) induz um estator EMF para equilibrar a tensão do terminal. Obviamente, φR deve ser o mesmo que quando o rotor estava no circuito aberto. De fato, φR permanecerá constante independentemente das condições operacionais criadas pela carga no motor. A interação de φR e F2, que estão estacionários um do outro, cria o casal tendendo a mover o rotor na direção do FR ou no campo do estator F1. O mecanismo de indução é, portanto, um dispositivo iniciante como diferente do motor síncrono.
Que o rotor agora é mantido estacionário (bloqueado a partir da rotação) e o enrolamento do rotor é curto-circuito. O rotor agora carrega correntes atuais, criando o MMF F2 girando na mesma direção e com a mesma velocidade que o campo do estator. F2 circula as correntes de reação no estator da barra de barramento (como em um transformador comum), de modo que o fluxo / pólo φR do fluxo resultante da densidade de fluxo (girando a caminhada do ar em velocidade síncrona) induz um estator EMF para equilibrar a tensão do terminal. Obviamente, φR deve ser o mesmo que quando o rotor estava no circuito aberto. De fato, φR permanecerá constante independentemente das condições operacionais criadas pela carga no motor. A interação de φR e F2, que estão estacionários um do outro, cria o casal tendendo a mover o rotor na direção do FR ou no campo do estator F1. O mecanismo de indução é, portanto, um dispositivo iniciante como diferente do motor síncrono.
Deixe o rotor curto-circuito agora pode girar. Funciona em direção ao campo do estator e adquire uma velocidade constante de n. Obviamente, n 
Slide S Unidade Velocidade (comparada à velocidade síncrona) à qual o rotor desliza atrás do campo do estator. A frequência do rotor f2 = sf é chamada de frequência de deslizamento. Da equação. (5.66), a velocidade do rotor é
![]()
As correntes de frequência de rascunho no enrolamento do rotor causam um campo de rotor do rotor em relação ao rotor na mesma direção que o campo do estator a uma velocidade de

Como o rotor funciona a uma velocidade n e o campo do rotor em (NS – N) em comparação com o rotor na mesma direção, a velocidade líquida do campo do rotor vista do estator (referência ao solo) é
![]()
Ou seja, o mesmo que o campo do estator. Assim, o campo de reação F2 do rotor é sempre estacionário em comparação com o campo do estator F1 ou o campo FR resultante (com φR fluxo por pólo). Como o rotor MMF F2 é proporcional à corrente do rotor I2 e que o fluxo / pólo resultante φR é fixado pela tensão terminal independente das condições operacionais, o torque do mecanismo de indução é dado por (ver Eq. (5.58))))))))))))))))))))))))))))))))))))))))))))))))))))))))))))))))))))))))))))))))))))))))))))))))))))))))))))))))))))))))))))))))))))))))))))))))))))))))))))))))))))))))))))))))))))))))))))))))))))))))))))))))))))
![]()
Observamos aqui que o torque é produzido pelo mecanismo de indução em qualquer velocidade mecânica que não seja síncrona; Esse casal é chamado de casal assíncrono.
O ângulo δ pelo qual F2 está atrasado no FR, o MMF resultante deve ser conhecido. Antes de prosseguir para determinar δ, deve-se notar que o curto-circuito do enrolamento do rotor é equivalente ao circuito curto todos os fatores de um enrolamento individualmente.
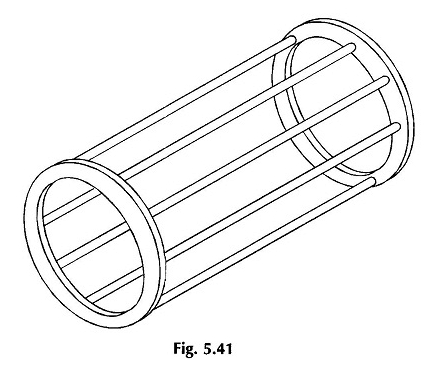
Consequentemente, o rotor não deve necessariamente ser arregaçado adequadamente; Ele pode ser construído para executar barras colocadas no rotor e slots de curto-circuito, criando anéis finais em cada lado do rotor.
Esse rotor é chamado de rotor da gaiola de esquilo; A gaiola condutora é ilustrada separadamente na Figura 5.41. O rotor do Squirrel-Cage possui uma construção barato e robusto e é adotado em uma grande maioria das aplicações de mecanismo de indução.
O princípio do motor de indução com um rotor rolo adequadamente é chamado de motor de indução do rotor da ferida e é fornecido com três anéis deslizantes que fornecem a instalação para adicionar uma resistência externa ao enrolamento do rotor antes de eliminá -los. Esses motores são usados em situações de carregamento responsáveis.
Normalmente, o deslizamento de carga total de um motor de indução do esquilo é de 3 a 10%pequeno. Consequentemente, a impedância do rotor é principalmente resistiva, a reatância dos ajustes do rotor sendo proporcional a f2 = sf é insignificante. Além disso, o EMF induz pelo rotor é proporcional à deslizamento do rotor porque φR é fixo e gira na velocidade NS – N = SNS em comparação com o rotor.
Como resultado, a corrente do rotor está quase alinhada com o rotor EMF e proporcional à deslizamento do rotor. Essa conclusão também se aplicaria a motoristas individuais do rotor.
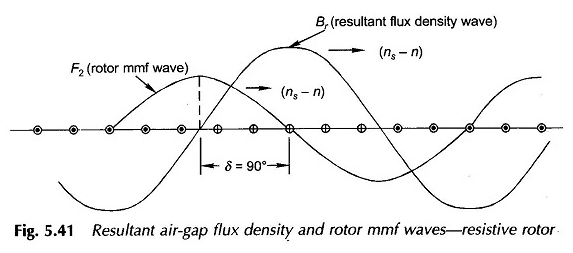
A Figura 5.42 mostra a onda de densidade de fluxo de escovação resistente ao residente na frente dos drivers do rotor em velocidade (NS – N) = SNS em um diagrama desenvolvido.
As correntes induzidas em drivers de rotor de curto-circuito são movimentos de distribuição sinusoidalmente distribuídos em velocidade (NS-N) em comparação com o rotor no sincronismo com o BR. Mais, porque os motoristas do rotor devem estar resumidos, ou seja,
As correntes estão alinhadas com seus respectivos EMFs, a distribuição da corrente do rotor está na fase espacial com a onda BR. A distribuição da corrente do rotor sinusoidal produz uma onda de rotor f2 sinusoidal do rotor que fica 90 ° atrás da distribuição da corrente do rotor ou 90 ° atrás da onda bruta.
Portanto, conclui -se que, para pequenos valores deslizantes, o ângulo δ no motor de indução é de 90 °. Então,

Como o rotor EMF é linearmente proporcional ao escorregamento, a corrente do rotor também é principalmente uma resistência ao rotor a pequenos valores deslizantes. Consequentemente, o torque desenvolvido no mecanismo de indução é uma função cada vez mais linear da mudança para um pequeno valor deslizante, sendo zero para s = 0, ou seja, a uma velocidade síncrona.
À medida que a mudança aumenta ainda mais, a reatância dos vazamentos do rotor não pode mais ser negligenciada. Seu valor de escorregamento é SX2, onde x2 é a reatância de vazamentos de rotor por fase na frequência f, ou seja, quando o rotor está em uma posição stand-sill. A corrente do rotor agora está atrasada para trás da EMF induzida

onde R2 é resistência ao rotor por fase.
Como as correntes nos drivers de rotor arrastam o EMF induzido pelo ângulo θ, a distribuição da corrente do motorista do rotor e, portanto, o rotor MMF F2 se move para a esquerda na Figura 5.40 por um ângulo θ, de modo que que
![]()
Isso significa sin Δ <1. Além disso, como a impedância do rotor aumenta com S, a corrente do rotor está longe de ser proporcional à mudança. Esses dois fatores causam a passagem do torque do motor através de um valor máximo e começam a diminuir gradualmente, à medida que S aumenta constantemente.
A natureza da característica completa da mudança de torque no mecanismo de indução é apresentada na Figura 5.43. O torque máximo é conhecido como torque de ruptura. O motor descansaria se fosse carregado além de um curto período de tempo com uma carga de torque maior que o valor da falha.
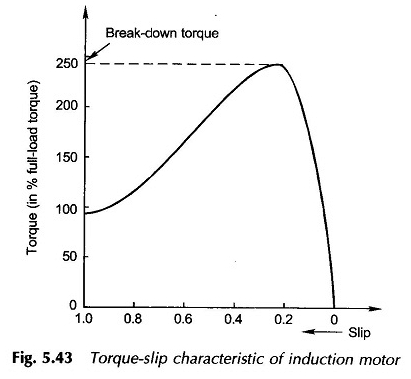
Como já mencionado, o deslizamento de um motor de indução é de 3 a 10% em carga total. Consequentemente, é significativamente uma unidade de velocidade constante, diferentemente do motor síncrono, que opera a uma velocidade constante independente da carga.
Geração dos resultados da ação Se um princípio do mecanismo de indução for executado em um turno negativo ou a uma velocidade n> ns, ou seja, a uma velocidade acima do síncrono.