Elektriksiz çok fazlı indüksiyon motorları:
Farklı tiplerden oluşan, yani çoklu aktarma motorlarının elektrik frenlenmesi, yani,
- Branchage (veya karşı akım frenleme)
- Dinamik (veya reostatik) frenleme
- Rejeneratif frenleme
1. Branchage (veya gelgite karşı frenleme)
Tapa, döner manyetik alanın yönüne neden olan üç fazdan ikisini tersine çevirerek bir indüksiyon motorunda yapılabilir.
Motoru fiş konumuna değiştirirken, motor alanınkine karşı yönde çalışır ve göreceli hız senkron hızın yaklaşık iki katı [(2 – s) kez], yani kayma (2 – s) ‘ye eşit olmak üzere çok eşittir.
Bu nedenle rotorda indüklenen voltaj, durmadan normalde indüklenen gerginliğin iki katı olacak ve sargı bu büyük voltaja dayanmak için ek yalıtım sağlanmalıdır.
Bağlantı döneminde, motor bir fren görevi görür ve her zaman dönen yükün kinetik enerjisini emer ve hızında düşüşe neden olur. İlişkili PMECH gücü, motordaki ısı şeklinde dağılır.
Aynı zamanda, rotor ayrıca gücü de ısı şeklinde dağılan statordan almaya devam eder. Rotor frekansındaki artış nedeniyle, rotorda ek demir kayıpları vardır.
Böylece, frenleme süresi boyunca rotorda geliştirilen ısı, başlangıç döneminde (veya bloke edilmiş bir rotor durumunda) geliştirilen ısının yaklaşık üç katıdır.
Bu nedenle fişin uygulanması gereken indüksiyon motorunun boyutuna, sadece koşulların yüklenmesiyle değil, aynı zamanda fren koşulu ile karar verilir.
Bir sincap kafes motoru durumunda, enerji tamamen makinede dağıtılır; Bir yara rotor motoru durumunda, bu enerji bu amaçla rotor devresine eklenen dış dirençte de dağılır.
Çok fazlı indüksiyon motorlarının elektrik frenleme koşulları, Şekil 1.103 (a) ‘da gösterildiği gibi, motorun motorun bağırma eğrileri%100 noktanın ötesine uzatıldıklarında incelenerek incelenebilir.
B noktasındaki koordinat, fiş zamanındaki torku temsil eder ve motor durağa yaklaştıkça torkun kademeli olarak arttığını görebiliriz, bundan sonra elbette, güç hattı bağlantısı kesilmezse, A’dan O’dan tork eğrilerinin normal hızına uygun olarak tekrar ters yönde yeniden bağlanır.
Böylece, motoru geri getirmek için, güç kaynağını motora sıfır hızda ayırmanın gerekli olduğunu görüyoruz.

Şekil 1.103 (a) ‘da gösterilen tork sürgülü eğrilerinden, fren torkunun kapsamının motor tarafından uygulanan maksimum torka kıyasla çok düşük olduğu gözlenmektedir. Bu özellikle rotorun düşük direnci içindir.
Rotor devresine giderek daha fazla direnç yerleştirildikçe, artan değerlerde maksimum tork meydana gelir.
Bu, esas olarak maksimum verimlilik için tasarlanan ve bu nedenle düşük direnç için böyle bir frenleme için uygun olmayan sincap kafesinin indüksiyon motorlarının nedeni budur.
Yaraların rotor sürücüleri durumunda, rotor devresinde direnç eklenmesi gittikçe daha fazla fren torkuna yol açar ve bu nedenle yaraların rotorunun sürücüleri fiş için daha uygundur.
Rotor direncindeki değişiklik, maksimum fren torkunun her yerde egzersiz yapıldığını ayarlayacak şekilde ayarlanırsa, en azından optimal frenlemeye ulaşılacaktır.

Statorun empedansını ve mıknatıslama reaktansını ihmal eden fren torkunun ifadesi çıkarılabilir ve

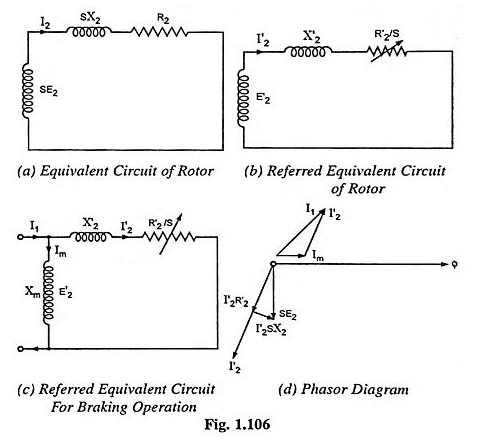
Rotorun akımı, frenleme süresi boyunca aşağıdaki ilişkiden belirlenebilir ve Şekil 1.103 (b) ‘de gösterildiği gibi izlenir.

Veya
- E2, bir durakta rotorun her aşamasında EMF indükler,
- R2, faz ve rotora karşı dirençtir ve
- X2, faz başına rotor durağının reaktansıdır ve
- S vardiyadır.
Mutluluk döneminde, Rotordaki EMF indüklediğinden, yukarıda belirtildiği gibi, rotorun akımı ve statorun akımı bu nedenle çok yüksektir. Bununla birlikte, fren akımı rotor devresine harici bir direnç yerleştirilerek azaltılabilir.
Bu noktadan sonra, yaraların rotorunun sürücüleri, sincap kafesinin rotorunun motorlarına kıyasla faydalıdır.
Yaklaşık 20 kW’lık bir çıkışın kafes motorları, bir yıldız-delta anahtarı sağlanırsa yıldız bağlantısı kullanılarak doğrudan bağlanır. Daha büyük motorlar stator direncine ihtiyaç duyar. Yara rotor motorları, akımın sınırlandırılması ve daha yüksek fren çiftlerinin geliştirilmesi için rotor dirençleri kullanır.
Yukarıda açıklandığı gibi sık frenleme hakları için termal derecelendirme problemleri meydana gelebilir ve kontaktörlerin sık bakıma ihtiyacı olabilir.
Stator bağlantılarının eşzamanlı tersine çevrilmesi ve yaraların kök motorlarına rotor direncinin dahil edilmesi oldukça mümkündür, ancak aynı etki rotor sargılarına doyurucular eklenerek elde edilebilir.
Alternatif olarak, derin bir çubuk rotor kafesi, fişin çalışmasından sonra rotorun etkili direncinde bir artış sağlayabilir, çünkü kayma frekansı aniden SF’den (2 – s) F’ye yükseltilir, burada f besleme frekansıdır.
Uygulamada, indüksiyon motorunu ters yönde başlattığı diskleri tersine çevirmek için aynı sürekli işlemin adımlarını içerir, fiş avantajlı olarak kullanılır.
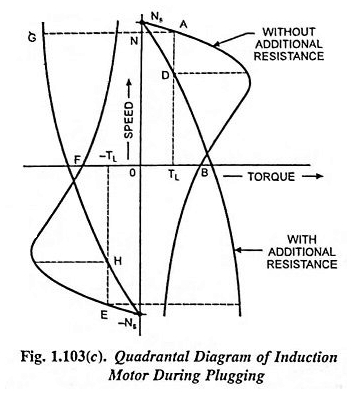
Fiş -in çalışması, Şekil 1.103 (c) ‘de gösterilen bir çeyrek diyagram kullanılarak da açıklanabilir. Şekil 1.103 (c) ‘de gösterilen hızlandırmanın özellikleri aslında motorun ikinci ve dördüncü çeyreğinde özelliklerinin bir uzantısıdır. Şekil 1.103 (c) ‘nin açıklaması, Şekil 1.94 (a) veya 1.94 (b) için biriyle tam olarak aynıdır.
2. Dinamik (veya reostatik) frenleme
Çok fazlı indüksiyon motorlarının bu elektrik frenlemesinde, reostatik frenleme, AC güç statorunun sarılmasının bağlantısı kesilerek ve sabit bir DC alanı üretmek için bir CC kaynağını heyecanlandırarak elde edilebilir.
Reostatik frenlemede, stator sargısı bir DC alanı sargısı olarak kullanılır ve rotor sargısı çerçevenin sarılması olarak kullanılır. Bir yara rotor makinesiyle, bir yük sağlamak için rotor devresine harici dirençler yerleştirilebilir. Bununla birlikte, sincap kafes makineleri ile, rotorun rotorunun kendisinin yükü oluşturması gerekir.
Heyecan kaynağı, bağımsız bir CC kaynağı tarafından veya AC sektöründen, Şekil 1.105’te gösterildiği gibi bir dizi transformatör doğrultucu aracılığıyla sağlanabilir.
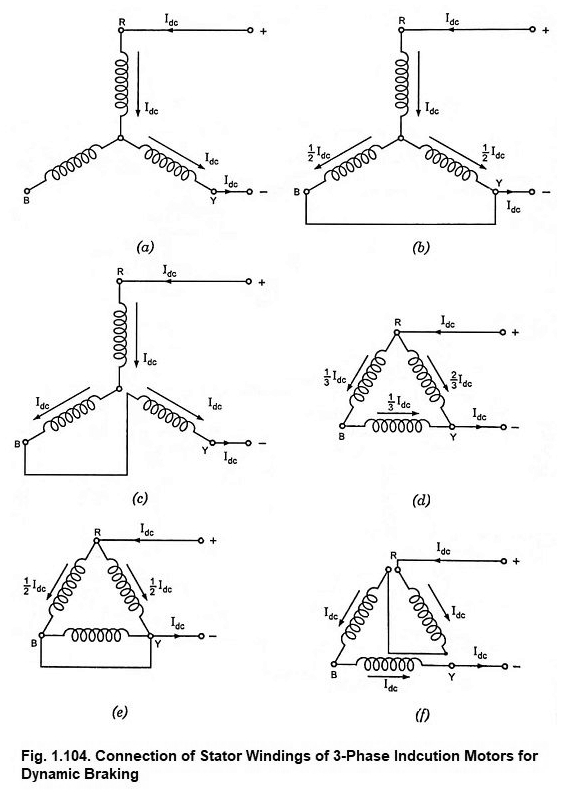
Statörü bir CC kaynağına bağlamanın çeşitli yöntemleri Şekil 1.104’te temsil edilmektedir. Her ne kadar Şekil 1.104 (c) ve 1.104 (f) ‘de gösterilen bağlantılar üç fazın düzgün bir akımını verir, ancak anahtarlama işleminde karmaşıktır.
Bu konuda daha basit olan, Şekil 1.104’te gösterilen bağlantılar. (a) ve (b) genellikle kullanılır.

Tipik bir bağlantı diyagramı Şekil 1.105’te verilmiştir; Makine, kapalı kontaktörlere sahip bir motor gibi çalışırken, Open ve B kapalı ile, üçüncüsü açık devrede bırakılan iki stator fazı tarafından doğrudan bir akım sağlanır.
R ‘direnci akımını sınırlamak için stator devresine yerleştirilir. Yara rotor motorları durumunda, frenleme etkisini kontrol etmek için rotor devresine ek direnç yerleştirilir.
Makine normal olarak bir motor şeklinde çalışırken, manyetik alan statörü, rotorunkiyle aynı yönde, ancak rotor iletkenlerinden biraz daha hızlı senkron bir hızda çalışır.
Stator sargıları AC gücünden kesildiğinde ve DC ile uyarıldığında, üretilen manyetik alan uzayda hareketsiz olacaktır, bu da rotor iletkenlerinin bir hız (1 – s) NS veya SNS ile aşan olacağını sağlar.
Rotor sürücülerinde indüklenen akımlar, bir fren torku üreterek otomotiv işlemine karşılık gelen yönde karşı çıkacaktır.
Hava boşluğu akışı sabit olmasına rağmen, makine AC ile heyecanlandığında ve bu nedenle rotor akımları, başlangıçta (yani NS demek için) karşılık gelen, ancak rotorun hızı ile azalan ve beklemeden sıfıra dönüşen frekansa yakın olan bir frekansa sahip olacağı gibi aynı sayıda kutup olacaktır.
Benzer şekilde, rotorda indüklenen EMF, rotor yürütüldüğünde sıfırda durmaya maksimum azalır.
Başka bir deyişle, rotorda indüklenen EMF, SE2 tarafından verilecektir; burada E2, ns hızında alanın önünde çalıştığında rotorda indüklenen EMF’nin genliğidir.
Bu nedenle, reostatik DC frenleme sırasında rotor koşullarının, senkronize durmadan düşen hızla, motorun normal hızlandığı zamanla aynı olduğu görülmektedir.
Sonuç olarak, rotorun eşdeğer devresi, Şekil 1.106 (a) ‘da belirtildiği gibi temsil edilebilir. Gerginliği ve empedansı s tarafından bölünerek, aynı akım i2’yi taşıyan Şekil 1.106 (b) ‘de resimli devreye sahibiz.
Stator sargısı sadece doğrudan akımı taşıdığından, statorun endüktansının kalıcı rejimde operasyon altında bir etkisi yoktur. Stator sargısı yoluyla uygulanan CC gerginliği sadece stator sargısına dirençle sabitlenir. Stator çekirdeğinde demir kaybı olmayacaktır.
Ancak rotorun çekirdeğinin kaybı önemli büyüklükte olacaktır ve bu nedenle, frenleme sırasında geliştirilen çifti belirleyen statora geri dönen rotora direnç değeri, onu dikkate almak için düzeltilmelidir, EMF rotorda indüklenir, E’2, IMXM tarafından verilecektir, burada IMXM tarafından verilecektir.
Şekil 1.106 (b) ‘deki resimli devre, Şekil 1.106 (c)’ de resimli bir devrede modifiye edilebilir. Bu değiştirilmiş devreye karşılık gelen faz diyagramı, Şekil 1.106 (d) ‘de gösterilmiştir,
Rotor akımının, uzayda sabit kalan bir mıknatıslama MMF IMN1’in neden olduğu sabit bir akış tarafından üretildiği gibi alternatif olduğu belirtilebilir.
Bununla birlikte, rotordan görüldüğünde, MMF manyetikleyici ve statordaki ortaya çıkan akış değişiyor gibi görünecektir.
Ek olarak, rotor ampère-kontrasyonları i2n2 (= i′2n1), IMN1 mıknatıslanma kulelerini korumak için stator ampère Tortors tarafından dengelenmelidir, stator i1n1’in rotor olarak kuleleri, IMN1 ve I′2n1’in değişir toplamını temsil eder.
Mevcut alternatif akım i1, yukarıda açıklandığı gibi stator tarafından taşınan doğrudan akımın genliğine ve stator sarma bağlantılarının doğasına bağlıdır.
Yukarıdaki tartışmadan, reostatik DC frenleme sırasında motorun çalışmasının, Şekil 1.106 (c) ‘de gösterilen eşdeğer devre (zaten tanıdık olduğumuz türler) kullanılarak analiz edilebileceği sonucuna varılabilir.
Fren torku ilişkiden belirlenebilir
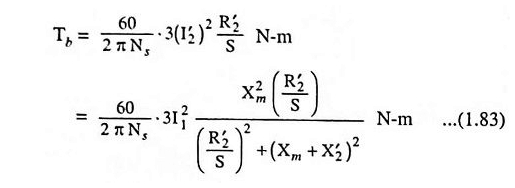
Yukarıdaki denklem, belirli bir indüksiyon motorunun herhangi bir hızında fren torkunu belirlememizi sağlar, doğrudan akım tarafından uyarıldığında, stator sargıları tarafından taşınan gerçek doğrudan akımla aynı MMF’yi üretecek eşdeğer bir AC’ye karşılık gelir.
Denklemin farklılaşması. (1.83) Wrt s ve maksimum için sıfıra asimile edin, maksimum fren torkuna karşılık gelen bir kaymaya sahibiz

ve maksimum çift,

Bir indüksiyon motorunun tipik performans özellikleri Şekil 1.107’de gösterilmektedir.
Motor tarafından geliştirilen fren torkunun genliği, uyarmaya (statorun silindiri tarafından geliştirilen alanın direncine), rotor devresinin direncine ve motorun hızına bağlıdır.
I1 heyecanının ve rotor R2 direncinin varyasyonunun etkisi de Şekil 1.107 (a) ‘da gösterilmiştir. Tasarım amacıyla, Şekil 1.107 (b) ‘de gösterilen tork rotoruna karşı direnç eğrileri bazen kullanılır.
RO2 rotor direncindeki artışla birlikte, maksimum fren torkunun da artması. Bununla birlikte, maksimum tork, denklemle belirtildiği gibi, mevcut kare (I21) ile orantılı olarak artmaz.
(1.85), çünkü XM mıknatıslama reaktansı, akım I1’deki bir artıştan kaynaklanan doygunluk nedeniyle azalır.
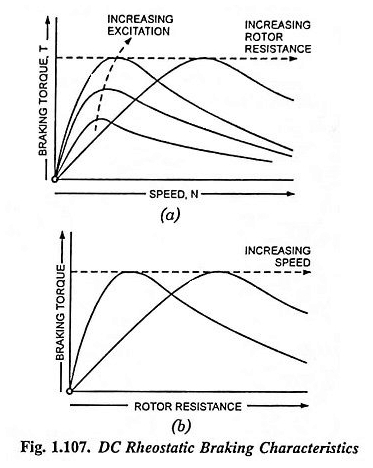
Kararlı frenleme işlemi, tork hız eğrisinin [yani Şekil 1.107 (a) ‘deki maksimum tork konumunun sol tarafında] steway kısmındadır.
Yanlışlıkla, torkun maksimum olduğu hızın üzerinde yükselirse, hızda yeni bir artış, fren torkunda bir azalmadan kaynaklanır, bu da bir refürasyon durumunda hızda yeni bir artışa yol açabilir.
Fren uygulamasının başlangıcında, rotor devresinde hızda bir azalma ile kademeli olarak azaltılması gereken yüksek dirence ihtiyacımız var.
Fren torku, aşağıdaki iki yöntemle veya aşağıdaki iki yöntemle kontrol edilebilir: (i) rotora karşı direnç değiştirerek du du du du du du duc (II) ‘yi kontrol ederek.
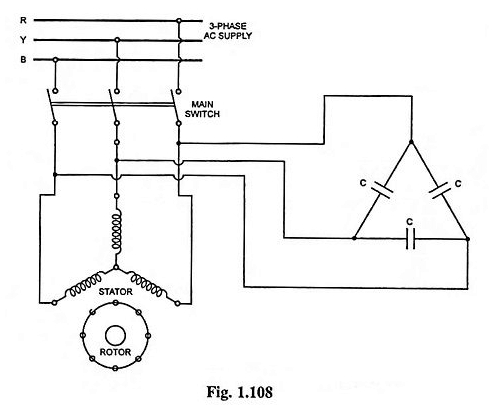
Dinamik AC freni, stator sargılarını Şekil 1.108’de gösterildiği gibi bir statik kapasitör bankasına bağlayarak kendini muafiyetle elde edilebilir. Bu durumda, indüksiyon makinesi AC heyecanını statik kapasitörlerden alan bir indüksiyon jeneratörü olarak çalışır.
Üretilen elektrik enerjisi, rotor devresindeki ısı şeklinde dağılır. Kondansatör bankalarının nispeten yüksek maliyeti nedeniyle dinamik AC frenleme popüler değildir.
Dinamik DC frenleme, güç kaynağının çok az gücünü alır ve madencilik sargıları ve yüksek atalet yükleri için yararlı olan pürüzsüz bir fren torku sağlar.
Fişe kıyasla avantajları, rotasyonun tersine dönme alanının olmamasıdır [ve bu nedenle, makinenin geri koşma eğilimi yok] ve daha düşük rotor kaybıdır. Rotor direncini artırarak, fren torku daha yüksek hızlarda daha etkili hale getirilebilir.
Bu nedenle bu yöntem geç inceleme ücretleri için çok uygundur. Bir sincap kafes motoru durumunda, rotora karşı direnç küçük olduğu için, fren torkunu çok düşük hızlarda uygulayacak ve bu nedenle sadece yükü getirmek için yararlı olacaktır.
Kapalı döngü sistemleri kullanan çok fazlı indüksiyon motorlarının elektrik frenlemesinde dinamik frenlemenin otomatik kontrolünün ortaya çıkması, indüksiyon motorlarını özellikle madencilik palanlarında disk kullanmak için DC motorlardan daha popüler hale getirdi.
Şekil 1.109, indüksiyon motorunun dinamik frenleme durumunda kadranal özelliklerini göstermektedir.

3. Rejeneratif frenleme
Rejeneratif frenleme, bir indüksiyon motorunun doğal bir özelliğidir, çünkü eşzamanlı bir hızda uzandığında bir indüksiyon jeneratörü olarak çalışır ve güç hattına güç döndürür.
Üç faz indüksiyon motoru, aşağıdaki işlemlerden birini kullanarak yüksek hızda senkron hızda çalışacak şekilde tasarlanabilir.
- Okuyucunun çalışma hızını azaltmak için frekans kontrollü indüksiyon motorlarında düşük frekans kaynağına gidin.
- Vinç, palans, ekskavatörler vb. Gibi yüklü bir kaldırma mekanizmasının aşağı hareketi
- Çok hızlı sincap kafes motorlarından daha küçük bir kutup operasyonuna gidin.
Yukarıdaki tüm işlemlerde, geliştirilen kayma ve tork, Şekil 1.110’da gösterildiği gibi negatif hale gelir ve bu nedenle makine bir jeneratör olarak hareket eder, mekanik enerji alır ve güç kaynağı sistemine elektrik enerjisi şeklinde geri yükler.
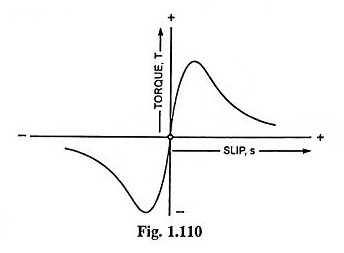
Yük motorun eşzamanlı hızın üzerinde neden olması durumunda, anahtarlama işlemi gerekmez. Makine senkron hızın üzerine sürüldükten sonra, frenleme işlemi otomatik olarak başlar.
Çalışma noktası, yük torkunun genliğine ve üretim işlemi sırasında makinenin tork hızının özelliğinin doğasına bağlı olacaktır.
Rotor devresindeki direnci değiştirerek, frenleme sırasında senkron hızın üzerinde herhangi bir hızda çalışmak mümkündür.
Yükün yükleme torkunun, makinesinin yetenekli olan maksimum fren torkunu aşması durumunda, sistem kararsız hale gelir ve hız daha da artar, muhtemelen makine hızlı çalışırsa, en azından fren torku geliştirilir.
Sincap kafesinin bir indüksiyon motoru durumunda, senkron hızdan önemli ölçüde daha yüksek bir hızda sabit bir hız elde edilir ve rejeneratif fren ancak motor ancak aşırı hıza direnecek şekilde tasarlanmışsa uygulanabilir.
Rejeneratif frenleme, sadece süper senkron hızlarda frenleme olasılığının dezavantajına sahiptir ve sonuç olarak Seldome fren için kullanılır.
Çok fazlı indüksiyon motorlarının bu elektrik frenleme yöntemi sadece kaldırma mekanizması tipinde veya çok hızlı bir sincap kafes motoru ile kullanılabilir. Dağ demiryollarında da avantajlıdır.
Toplam enerjinin yaklaşık% 20’sini belirli demiryolu yarışlarına geri döndürür ve çok fazla fren ayakkabı giysisi tasarrufu sağlar.