Dinamik İndüksiyon Motor Freni (veya Reostatik Frenleme):
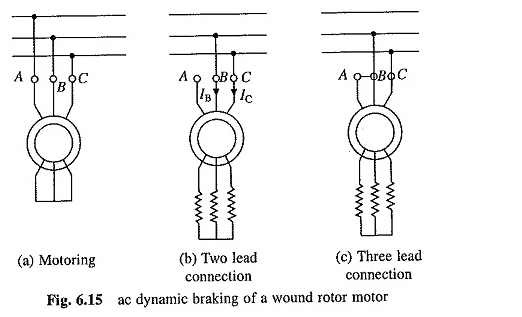
(A) AC Dinamik Fren – Endüksiyon motorunun dinamik AC freni, motor bir kaynak fazı bağlantısı keserek ve açık bırakarak (Şekil 6.15 (b)) veya başka bir makine fazıyla (Şekil 6.15 (c)) tek bir faz güç kaynağı üzerinde yürütüldüğünde elde edilir.
İki incir bağlantısı. 6.15 (b) ve (c) sırasıyla iki ve üç kurşun bağlantısı olarak adlandırılır. 1 fazlı bir güç kaynağına bağlandığında, motorun üç voltaj aşamasında pozitif ve negatif bir dizi ile güçlendirildiği düşünülebilir.
Makine tarafından üretilen net tork, pozitif ve negatif sekans gerginlikleri nedeniyle çiftlerin toplamıdır. Rotor yüksek dirence sahip olduğunda, net tork negatiftir ve frenleme işlemi elde edilir. İki ve üç kurşun bağlantısı için motor analizi aşağıdaki gibi yapılır:
İki kurşun bağlantısı: Oraya açık devrede bağlanan bir motorun A fazının olduğunu varsayalım. Sonra IA = 0 ve IC = -IB. Sonuç olarak, sırasıyla pozitif ve negatif dizinin bileşenleri ve IN,

burada α denklem tarafından verilir. (6.17).
Pozitif ve negatif dizi bileşenleri eşit ve zıt olduğundan, seri muhalefete iki eşdeğer devre bağlanabilir. Bu seri kombinasyona uygulanacak voltaj

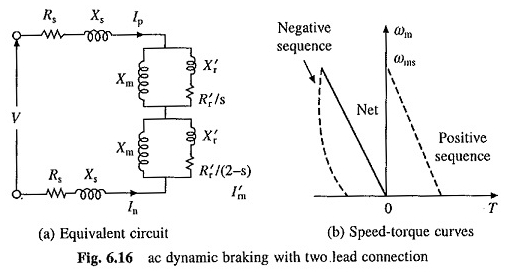
Uygulanan bir voltaj JVBC / √3 ile akım ip = – in = jib / √3 ise, yalnızca uygulanan bir faz voltajı V ile takip ederse, akım Ib / √3 olacaktır. Bu nedenle eşdeğer devre, Şekil 6.16 (a) ‘da gösterildiği gibi çizilebilir.
Akımın pozitif ve negatif dizi bileşenlerinin değerleri eşit olsa da, karşılık gelen çiftler değildir. Pozitif ve negatif dizi akımları ve net tork için hız hız eğrilerinin doğası Şekil 6.16 (b) ‘de temsil edilmektedir.
Uygun rotor direnci seçimi ile, fren torku hız aralığı boyunca elde edilebilir. Gerekli rotora karşı direnç büyük olduğundan, indüksiyon motorunun AC dinamik frenlenmesi sadece yara rotor motorlarında kullanılabilir.
Bu konuda yüksek hızlar (veya düşük kayma değerleri), pozitif bir sekans bileşeninin kısmının empedansı çok yükselir. Akımın pozitif ve negatif dizisinin bileşenleri eşit olması gerektiğinden, net fren torku küçüktür ve bu nedenle fren çok etkili değildir.
Üç peletle bağlantı: Burada, bağlı motora bağlı Y’nin makarasının iki aşaması, üçüncü faz ile seri olarak paralel olarak bağlanır (Şekil 6.15 (c)). A ve B aşamalarını bırakın

İki kurşun bağlantının aksine, gerginliğin pozitif ve negatif dizisinin bileşenlerinin büyüklüğü eşittir ve akımların pozitif ve negatif dizisinin bileşenleri değildir. Eşdeğer devre Şekil 6.17’de gösterilmiştir.
Devrenin pozitif ve negatif dizisinin parçaları bağımsızdır ve bu nedenle, akımın negatif sekans bileşenine eşdeğer devrenin pozitif bir sekans kısmı ile herhangi bir kısıtlama uygulanmaz.
Böylece, yüksek hızlarda daha yüksek fren çiftleri (iki kurşun bağlantıya kıyasla) elde edilir. Bu bağlantı ile civciv hızının özelliğinin doğası, Şekil 616 (b) ile aynıdır.
Paralel olarak iki fazın bağlantılarındaki temas dirençleri arasındaki herhangi bir eşitsizlik, fren torkunu azaltır ve hatta bir otomotiv torkuna yol açabilir, çünkü durum iki fazdan birinde artan bir dirençle iki kurşun bağlantıya daha fazla eğilimlidir (kullanılan rotora karşı direnç iki kurşun bağlantısından daha düşüktür).
Sonuç olarak, zayıf torkuna rağmen genellikle iki kurşun bağlantısı tercih edilir. Ana tek -faz CA fren uygulaması vinç yüksekliğidir.
(b) Kapasitörler kullanılarak kendini heyecanlandıran frenleme: Bu yöntemde, motor terminalleri aracılığıyla sürekli olarak üç kapasitör tutulur. Kapasitörlerin değerleri bu nedenle, hattan bağlantısı kesildiklerinde, motor kendini heyecanlandırılmış bir indüksiyon jeneratörü olarak çalışır.
Frenleme bağlantısı Şekil 6.18 (a) ‘da temsil edilir ve kendini muafiyet işlemi, şarj koşulu olmadan Şekil 6.18 (b)’ de açıklanmaktadır. Eğri A, makinenin belirli bir hızda bir makine mıknatıslama eğrisi değildir ve B Hattı, akımı kapasitörler aracılığıyla temsil eder.
![]()
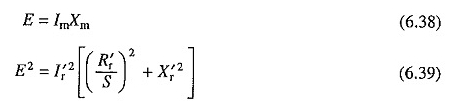
burada E, stator tarafından faz tarafından indüklenen stator’dur.
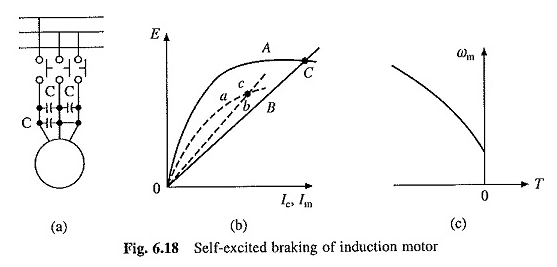
Kapasitörler heyecan için gerekli reaktif akımı sağlar. İşlem, iki özelliğin kesişimi olan C noktasında gerçekleşir. Hız düştüğünde, aynı mıknatıslanma akımı için E değeri düşer ve A mıknatıslanması A’nın yeni özelliği elde edilir.
Öte yandan, IC’ye karşı karakteristik E’nin eğimi yeni bir karakteristik B vererek artar. İki eğrinin kesişimi şimdi meydana gelir c. Böylece, mıknatıslama eğrilerini aşağı doğru hareket ettirirken hızdaki azalma, kapasitör gerginliğinin eğimi ve akım eğrisi artar.
Genellikle yüksek olan belirli bir kritik hızda, iki eğri karşılaşmaz ve makine kendini heyecanlandırmaz ve fren torku sıfıra düşer. Kendini heyecanlandıran fren hızının özelliği Şekil 6.18 (c) ‘de temsil edilmektedir.
Bazen, fren torkunu arttırmak ve makinenin dışında üretilen belirli bir enerjiyi dağıtmak için stator terminallerine dış dirençler bağlanır. Şekil 6.18 (b) ‘in yapısı yalnızca herhangi bir şarj işlemi için geçerlidir.
Daha kesin bir analiz için motor empedansının azaltılması dikkate alınmalıdır. Bu diyagram nadiren kullanılır, çünkü fren torku genellikle yüksek bir hızda sıfıra düşer.
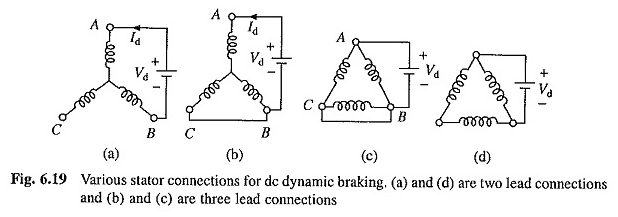
(C) Dinamik Fren CC: Bir hızda çalışan bir indüksiyon motorunun statörü doğrudan güç kaynağına bağlandığında elde edilir. Yıldız ve delta bağlantıları için iki ve üç kurşun olmak üzere yaygın olarak kullanılan iki bağlantı Şekil 6.19’da temsil edilmektedir.
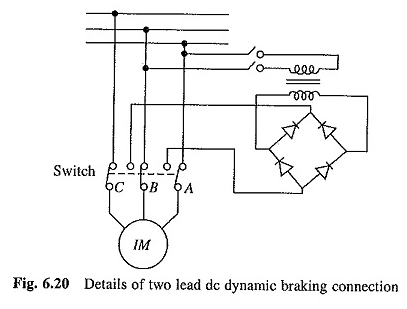
İki kurşun bağlantısı için bir diyot köprüsü kullanarak DC beslemesi elde etmek için bir yöntem Şekil 6.20’de gösterilmiştir.
Stator’u geçen CC akımı sabit bir manyetik alan üretir. Rotorun bu alandaki hareketi, rotorun rotorunda bir gerilime neden olur. Bu nedenle makine jeneratör olarak çalışır.
Üretilen enerji, rotor devresine dirençte dağıtılır, böylece indüksiyon motorunun dinamik frenlenmesini sağlar.
Alan sabit olduğundan, rotor sürücüleri ve alan arasındaki göreceli hız şimdi ωm’dir. İndüklenen voltaj frekansı, ωm = ωms olduğunda kaynak CA’nın (veya nominal motorun frekansının) voltajının frekansına eşit olacaktır.
Veya yarış sırasında rotorda senkron bir hızda indüklenen voltaj. Bir hızda çalıştığında, indüklenen voltaj ve frekansı sırasıyla SER ve SF olacaktır. BU YÜZDEN

Bu, rotor için Şekil 6.21 (a) fazında eşdeğer bir devre verir. Tüm miktarların S tarafından bölünmesi, nominal frekansa eşdeğer bir devre üretecektir.
Stator kulelerinden elde edilen çeşitli eşdeğer devre parametrelerine referans olarak, Şekil 6.21 (b) ‘de gösterilen rotor fazında eşdeğer bir devre verir. İndüksiyon motorunun dinamik DC frenlenmesi altındaki statorun eşdeğer devresi, Şekil 6.21 (c) ‘de gösterilmiştir.
Şekil 6.21 (b) ‘de eşdeğer bir rotor devresi ile birleştirmek için önce nominal frekansta stator fazı ile eşdeğer bir devre elde etmeliyiz. Eşdeğer devre Şekil 6.21 (c), stator MMF’nin sabit ve hızdan bağımsız olduğunu düşündürmektedir.
Bu nedenle, statorun bir faz akımı veren üç faz dengeli bir güç kaynağı ile güçlendirildiğini hayal ediyoruz. Mevcut CA, CC akım kimliği ile aynı genliğe sahip stator mmf üretmesi koşuluyla ID’ye eşdeğerdir.
Böylece, CC akım kimliği tarafından üretilen sabit bir MMF statorunu, aynı genlikten oluşan ancak senkron hızda dönen bir MMF (IS tarafından üretilen) ile değiştiriyoruz.
Bu iki MMF’nin farkı, hava boşluğunun üretiminden sorumlu olacak bir hava boşluğu MMF olacaktır ve bu da statorda indüklenen nominal frekansın gerginliğine neden olur. Nominal frekansta stator fazındaki eşdeğer devre, resimli formu Şekil 6.21 (d) ‘de alır.
Şekil 6.21 (6) ve (d) ‘nin eşdeğer devrelerinin birleştirilmesi ve transformatörün geri çekilmesi, fazda devre eşdeğeri ile nominal bir frekans verir (Şekil 6.21 (e)).

Küçük s için küçüktür ve bu nedenle IM yaklaşımları. Yüksek bir anlık mesajlaşma değeri nedeniyle, manyetik devre doymuşdur. Bu nedenle, XM sabit değildir, ancak IM’ye göre değişir. Kesin bir analiz için, XM’nin IM ile varyasyonu dikkate alınmalıdır.
IS ve ID arasındaki ilişki statorun bağlantısına bağlıdır. Örneğin, Şekil 6.19 (a) ‘daki iki kurşun bağlantısı için türetelim. Burada ia = id ve ib = – id.
N, her bir sargımda etkili bir dönüş sayısıysa, A fazı tarafından üretilen maksimum MMF IDN olacak ve Faz B tarafından üretilen maksimum MMF (-IDN) olacaktır. Bu MMF’lerin uzayda sinüzoidal olarak dağıtıldığı varsayılarak, ortaya çıkan MMF’nin sonucu olacaktır.
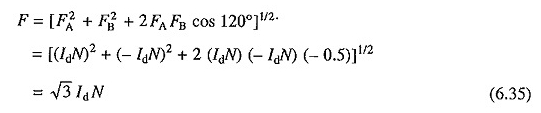
Makine dengeli üç fazlı akım kaynağı ile güçlendirildiğinde, Stator MMF zirvesi

F = f ‘olduğunda kimliğe eşdeğerdir. Bu nedenle, denklemlerden. (6.35) ve (6.36)
![]()
Değerler diğer bağlantılar içindir (Şekil 6.19 (b), (c) ve (d)):
![]()
Torca hızının özelliği aşağıdaki gibi hesaplanır.
Şekil 6.21 (e) ‘deki eşdeğer devreden
XM ve rotor tarafından oluşturulan paralel dallar arasındaki akımların dağılımını düşünün

Denklemin çıkarılması. (6.39) (6.40) verim

Denklemin (6.39)

Motor torku

XM, IM, Denklemlere bağlı olduğundan. (6.38) – (6.42) doğrusal olmayan cebirsel denklemlerdir. Aşağıdaki adımların kullanılması dijital bir çözüm ihtiyacından kaçınır. Bir IM değerini varsayalım, Mıknatıslanma karakteristiğinden karşılık gelen E’yi elde edin, denklemden XM’yi hesaplayın.
(6.38), R’yi (6.41) ‘den alın, (6.42) sonra ωm ve t’yi denklemlerden hesaplayın. (6.34) ve (6.43).
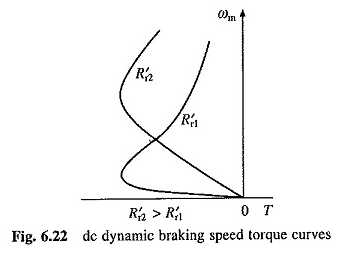
Şekil 6.22, iki rotor direnç değeri için hız torku eğrilerinin doğasını göstermektedir. Bir sincap kafes motorunda veya rotorda harici dirençsiz bir yara ağacı rotor motorunda, maksimum tork düşük hızda meydana gelir.
Maksimum tork rotor direncinden bağımsız olsa da, maksimum torkun meydana gelme hızı, rotora karşı dirençle artar. Ne zaman şek.
6.22 DC İndüksiyon Motor Hızı Çift Eğrilerinin Dinamik Frenlenmesi Hızlı Frenleme Gerekir, Rotor devresine sansasyonel direnç bağlanır ve hız düştükçe kesilir.
Aktif bir yükü korumak için kullanıldığında, maden rüzgarlarında olduğu gibi, denge durumunda stabiliteyi sağlamak için negatif eğime sahip hızlanma eğrileri elde etmek için yüksek direnç bağlanır.
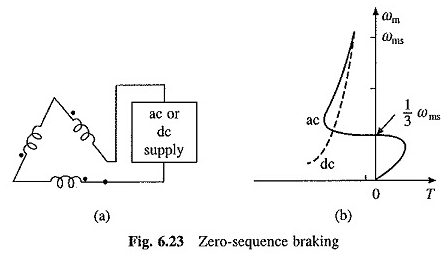
(d) Sıfır sekanssız: Bu frenlemede, üç stator fazı seri olarak tek bir faz AC veya Şekil 6.23 (a) ‘da gösterildiği gibi bir CC kaynağı ile bağlanır. Böyle bir bağlantı sıfır dizi bağlantısı olarak bilinir, çünkü statorun tüm önemli noktalarındaki akımlar birlikte platformdur.
Co-Country akımlarının (veya sıfır dizinin) neden olduğu MMF, makinenin gerçekten toplandığı kutup sayısının üç katı bir manyetik alan üretir. Bir AC güç kaynağı ile, ortaya çıkan alan uzayda sabittir ve güç kaynağının sıklığına gider.
DCE güç kaynağı ile, ortaya çıkan alan uzayda sabittir ve sabit büyüklüğündedir. Bu bağlantının önemli bir avantajı, tüm stator aşamalarının düzgün yüküdür. AC ve CC güç kaynağı için hız hız eğrilerinin doğası Şekil 6.23 (b) ‘de gösterilmiştir.
Alternatif akım arzı ile frenleme, senkron hızın sadece üçte birine kadar kullanılabilir. Bununla birlikte, bu bağlantı tarafından üretilen fren çiftleri otomobilden önemli ölçüde daha büyüktür. Motor esas olarak rejeneratif frenlemede çalışır.
Düşük dirençli motorlar için rotor için üretilen enerjinin önemli bir kısmı geri kazanılır. İndüksiyon motorunun dinamik AC frenlemesinden farklı olarak, rotora karşı yüksek direnç gerektirmez ve bu nedenle hem sincap motorları hem de roton motorları ile kullanılabilir.
Güç kaynağı ile frenleme hız aralığı boyunca mevcuttur. Esasen dinamik frenlemedir, çünkü üretilen tüm enerji rotor direncinde boşa harcanır.
Üç faz çalışmasından normal sıfıra kadar anahtarlama düzenlemesi, motorun delta bağlı bir statörü olduğunda son derece basittir.