İndüksiyon motoru eğitiminin kapalı döngüsünde hız kontrolü:
İndüksiyon motoru eğitiminin kapalı döngü hız kontrolü Şekil 6.43’te gösterilmiştir. Kayan bir sınırlayıcı ve harici hız döngüsüne sahip bir iç hız döngüsü kullanır. Belirli bir akım için, kayma hızının sabit bir değeri olduğundan, kayar hız döngüsü de dahili akım döngüsü olarak çalışır.
Buna ek olarak, motor işleminin her zaman senkron hız ve tüm frekanslar için maksimum tork hızı arasındaki hız hızı eğrisinin her zaman meydana geldiğini garanti eder, böylece yüksek tork / akım oranı garanti eder.
Okuyucu, rejeneratif frenleme ve dört çeyreğe sahip çalışma kapasitesine sahip bir CC kaynağından beslenen bir PWM inverter kullanır. Ancak sürücü şeması, rejeneratif veya dinamik fren kapasitesine sahip herhangi bir VSI veya Cycloconverter oynatıcı için geçerlidir. Okuyucunun çalışması aşağıda açıklanmaktadır.
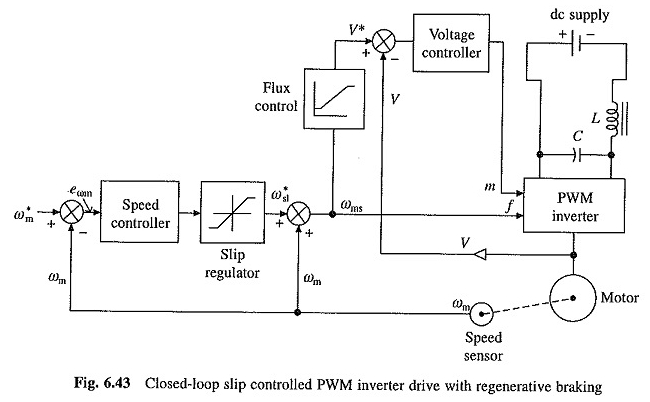
Hız hatası bir PI denetleyicisi ve kayar bir regülatör aracılığıyla işlenir. PI kontrolörü denge durumunda iyi bir hassasiyet elde etmek ve gürültüyü hafifletmek için kullanılır.
Kayan regülatör, maksimum değeri, invertörün akımını yetkili bir değerle sınırlamakla sınırlı olan kayar hız kontrolü ω * SL’yi tanımlar. Gerçek hız ωm ve kayma hızının eklenmesiyle elde edilen senkron hız, invertörün frekansını belirler.
V * makine terminalinin voltajının indüksiyon motorunun kapalı döngü hız kontrolü için referans sinyali, bir fonksiyon jeneratörü kullanılarak f frekansından üretilir.
Neredeyse temel hızda sabit bir akış işlemini ve temel hızın üzerinde sabit bir terminal voltajında işlemi garanti eder.
Hız kontrolü ω * M’nin adımlarında bir artış pozitif bir hız hatası üretir. Kayan hız kontrolü ω * SL maksimum değerde tanımlanır.
Okuyucu, hız hatası küçük bir değere düşürülene kadar, mevcut maksimum torku üreterek yetkili invertörün maksimum akımını hızlandırır. Okuyucu nihayet motor torkunun şarj torkunu dengelediği kayan bir hızda deforme olur.
Hız kontrolünde bir azalma negatif bir hız hatası üretir. Kayma hızı komutu maksimum negatif değerde tanımlanır.
Okuyucu, hız hatası küçük bir değere düşürülene kadar rejeneratif frenleme, maksimum yetkili akım ve mevcut maksimum fren torku altında kırılır.
Şimdi, işlem otomatikleştirmeye geçiyor ve okuyucu, motor torkunun yük torkuna eşit olduğu kayan hızda ayarlandı.
Mevcut maksimum tork için hız hatası düzeltildiğinden okuyucunun hızlı bir yanıtı vardır. Doğrudan kayar kontrol, tüm çalışma koşullarında kararlı çalışma sağlar.
Temel hızın ötesinde operasyon için, kayar regülatörün kayma hız sınırı, dağıtım değerine ulaşılana kadar frekansla doğrusal olarak arttırılmalıdır.
Bu, kayan regülatörün çıkışına eklenerek, frekans ve uygun bir işaretle orantılı ek bir kayma hız sinyali eklenerek gerçekleştirilir.
Arıza torkuna ulaşıldığı frekansın üzerindeki frekanslar için, kayan hız sınırı arıza değerine yakın sabit tutulur.
Hızlı bir yanıt gerektiğinde, indüksiyon motorları kısa vadeli geçiş operasyonları sırasında nominal akımı birkaç kez taşımaya yetkili olabileceğinden, maksimum kaymanın SIN’e eşit olmasına izin verilebilir.
İnvertör ve ön dönüştürücü, geçiş ve kalıcı diyet boyutları aynı olan yarı iletken cihazlar kullanılarak inşa edilmiştir. Ardından, invertör ve ön dönüştürücünün notları motorun akımının birkaç kez seçilmelidir.
Bu, varyasyon maliyetini önemli ölçüde artıracaktır. Hızlı bir geçiş yanıtı gerekmediğinde, inverter ve ön dönüştürücü akımları motorunkinden biraz daha yüksek olacak şekilde seçilebilir.