İndüksiyon Motoru Odaklı Kontrol: İndüksiyon Motoru:
Önceki bölümlerde tartışılan VSI veya CSI kullanılarak kayar kontrollü disklerde, stator voltajı veya stator akımı kayma frekansı kullanılarak kontrol edilir. Sadece genlikte kontrol edilirler.
Stator akımının kontrolü, akışa kıyasla faz konumunu desteklemez. Kontrol tatmin edici dinamik davranış sağlamaz. Rotor frekansındaki değişikliklere salınımlı bir yanıt vardır.
Dinamik cevap, stator akımının akışa kıyasla hem genlikte hem de faz pozisyonunda kontrol edildiği indüksiyon motorunun zeminine yönelik kontrol prensibi kullanılarak geliştirilebilir.
İndüksiyon motorunun kontrolünde, stator akımı torkun yanı sıra akış sağlama işlevine sahiptir.
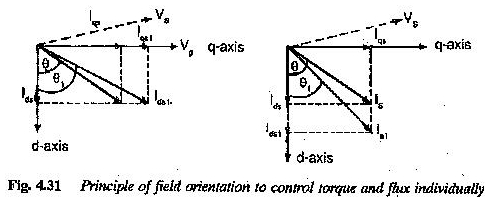
İndüksiyon motoru, stator akım bileşenlerinin, yani akış üretimi ve tork üretimi ayrı ayrı kontrol edilirse bir motora benzer bir işlem olacaktır (Şekil 4.31).
Bu aslında torkun takviye akımına ve alan akımındaki akışa bağlı olduğu sürekli bir akım motorunda geçerlidir. Aralarında bir ayrışma var, ancak çerçevenin reaksiyonunun etkileri için.
Bu etkiler sargıları telafi edilerek ortadan kaldırılabilir ve heyecanlı bir CC motorunda ayrı ayrı mükemmel bir ayrışma vardır. Bu tür bir ayrıştırma, indüksiyon motorlarının kontrol edilmesinde caziptir. Prensip, vektörün zeminde veya kontrolüne yönlendirilir.
Bu kontrol, okuyucunun dinamik performansını her hızda geliştirir. Stator akımı, biri D ekseni ve diğeri Q ekseni boyunca iki bileşene ayrılır.
Referans eksenler, rotor akışı doğrudan eksen boyunca tamamen mevcut olacak şekilde seçildi. Dörtlü bileşeni sıfırdır.
Böylece, akımın d ekseni boyunca bileşeni, akış bileşeni üreticisidir ve q ekseni boyunca torkun üretici bileşenidir. Bu bileşenleri bağımsız olarak değiştirerek, akışın bağımsız bir kontrolüne ve bir çiftin kontrolüne sahip olabiliriz. Bunlar Şek.
4.31 (a) ve (b). Birincisi, akışın değişimi akımın değişken bir doğrudan eksen bileşeni ile gösterilirken, ikincisinde statorun q ekseninin bileşeninin varyasyonu temsil edilir.
Sonuç olarak, stator akımının kontrolü sadece büyüklüğündeki varyasyona değil, aynı zamanda faz açısına da eşdeğerdir. Bu nedenle yönteme vektör kontrolü denir.
Sabit hava boşluğu akışını korumak için kullanılan vektörler kontrol teknikleri, tork gecikme ile kayar frekansı takip ettiğinden, eğitime zayıf dinamik özellikler verir. Rotor akışını sabit tutmak için teknikler geliştirilmiştir.
Bu yöntemlerde, çift gecikmeden takip eder, böylece dinamik davranışı iyileştirir. Aktüatör olarak kullanılan indüksiyon motorunun zeminine yönelik kontrol için yüksek kaliteli bir dinamik de gereklidir.
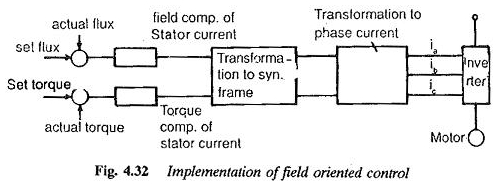
Şekil 4.32, yönde yönlendirme ilkesinin uygulanmasını göstermektedir. Rotor akışının gerçek değeri referans değeri ile karşılaştırılır ve bu şekilde elde edilen hata, akımın doğrudan eksen bileşenini kontrol etmek için kullanılır.
Normalde, bu bileşen rotor akışı sabit olacak şekilde sabit tutulur. Dörtgen ekseninin bileşeni, gerçek torkun ve referans torkunun karşılaştırılmasından elde edilen hata sinyali kullanılarak kontrol edilir. Bileşenler döner çerçevede eşzamanlı bir şekilde.
Sonuç olarak, akış üretiminin bileşenleri ve takviye torku arasındaki ayrıştırma, bir referans koordinat sistemi ve bu referans çerçevesindeki ve son olarak stator çerçevesindeki miktarların dönüşümü gerektirir,
Geçişli çift inme olmadan çok iyi dinamik davranış sağlayan bu kontrolde, ikincil bir akış gereklidir, bu da iki şekilde sunulabilir:
1. Akış algılama bobinlerini doğrudan kullanarak.
2. Gerilim ve akımlar gibi kolayca ölçülebilir terminal miktarları kullanarak bir makine modeli kullanarak akışın dolaylı tahmini.
Doğrudan ölçüm kullanan ilk yöntem iyi sonuçlar verir ve muhtemelen mevcut en kesin kontrol yöntemidir. Ölçüm, araştırma bobinleri, salon probları veya akışı ölçmek için başka bir teknikle gerçekleştirilir.
Ölçülen akış, tork üretimi bileşenleri ile stator akım akışının üretimi arasında temizlenmiş ayrıştırmayı yapmak için kullanılır. Yöntem aslında parametrelerdeki varyasyonlara duyarsızdır. Bununla birlikte, kafes motoru sağlamlığını ve inşaat sadeliğini kaybeder.
Motorun sağlamlığını ve sadeliğini korumaya çalışırsak, akış ikinci yöntem kullanılarak elde edilir. Rotor akışı stator voltaj vektöründen, akım vektöründen ve rotor hızından tahmin edilir. Bu tahmini akış tork kontrolörü ile beslenir.
Bu yaklaşım parametrelerdeki hatalara duyarlıdır. Doğrudan ölçüme eşdeğer bir performans elde etmek için rotor direnci, sızıntılar ve diğer parametreler hassasiyetle belirlenmelidir.
Ne yazık ki, hesaplamada kullanılan motor parametreleri vakum testlerinden belirlenir ve çalışma noktasında gerçekte bulunan parametrelerin değerlerini temsil etmez.
Ek olarak, bu parametreler akımın doygunluğu, sıcaklığı, frekansı ve genliği ile önemli ölçüde değişir. İkincil akış seviyesi parametrelerdeki değişim ile değiştirilebilir. Parametrelerdeki bu varyasyonlar, dinamik performansı bozan hatalı akış kontrolüne neden olur.
Parametre değerlerindeki değişimden (esas olarak rotor direnci) bağlı hataları önlemek için, yanlış bir tahmin veya motor çalışma koşulları nedeniyle otomatik parametrelerin tanımlanması veya uyarlanması kullanılmıştır.
Yöntemler, parametrelerin değişimi nedeniyle performansdaki değişiklikleri tanımlar ve parametreleri buna göre düzeltir.
Akışın tahmini değeri ile motordaki istenen akış arasındaki hata, rotor direnci veya rotorun zaman sabiti olan en etkili parametreyi düzeltmek için kullanılır, böylece makine modeli herhangi bir hata olmadan akışın gerekli değerini verir.
Son zamanlarda tartışılan bir diğer yöntem, indüksiyon motorunun rotor direncinin kesin değerini belirlemek için çevrimiçi bir tekniktir. Tanımlama, negatif sekans akımı enjekte edilerek ve negatif dizi gerginliğini tespit ederek elde edilir.
Rotor direncinin değeri bilgi kullanılarak hesaplanır. İndüksiyon motorunun zeminine yönelik kontrol, bir termal sensöre ihtiyaç duymadan rotora karşı direncin değerini düzeltir.
Devlet gözlemcilerinin geri bildirim yöntemleri de parametrelerin tanımlanması için kullanılır.
Mikroişlemcilerin (μP) ve mikrobilgisayarların ortaya çıkmasıyla, eğitim sistemi ile disklerle bağlantılı sorunları etkili bir şekilde çözmek mümkündür. Akış vektörü çok kolay belirlenebilir.
Motor modelinin eşleşmesini ve rotor parametrelerinin bir korelasyon prosedürü ile tanımlanmasını gerçekleştirmek için μP’ler, herhangi bir ek önlem olmadan çok etkili olabilir.
UP’ler ayrıca inverter çekim dizileri oluşturmak için sofistike algoritmaların uygulanmasını kolaylaştırır.
Buna ek olarak, genel eğitim sisteminin alan odaklı kontrolünde geliştirilen süreç ekonomik olarak mümkün hale gelmiştir, çünkü şimdiye kadar kullanılan pahalı donanım artık yazılımla değiştirilebilir.
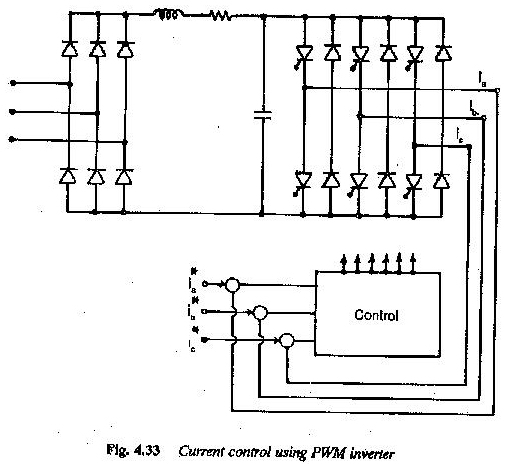
Alanın oryantasyonu, indüksiyon motorunun motoruna yönelik bir kontrolü besleyen CSI ile çok kolay uygulanabilir. PWM inverter iyi dinamik davranışa sahip olduğundan, bunlar çıktının yan tarafında bir akım kontrolü ile kullanılır.
Şekil 4.33, PWM invertörünü kullanarak akım kontrol prensibini göstermektedir. Bunun VSI ve CSI avantajları vardır.
Akışın akma modunda indüksiyon motosikletleri:
Sürekli akım motorları durumunda, saha akımının sabit bir entegrasyon voltajına indirgenerek temel hızın üzerindeki hızlar elde edilir. Çift gelişti. Bu hız aralığında sabit bir güç modu gerçekleştirilebilir ve akış akışı olarak adlandırılır.
İndüksiyon motorları durumunda benzer davranışlar gözlenebilir. Gerilim nominal frekans için nominal değerine ulaşır. Bu değerin üzerindeki frekanslar için gerginliğin gerginliği sabit tutulur. Motor hızı frekansla orantılı olarak artar.
Frekans artışı nedeniyle hava alanı akışı azalır. Belirli bir rotor frekansındaki tork, stator frekansının karesi ile ters orantılıdır ve gelişmiş güç sabit değildir. Zayıf akış koşulları altında dinamik davranış çok zayıftır. Bu, frekansla orantılı maksimum tork için değişken bir kayma frekansı ile geliştirilebilir.
Mevcut güç kaynağına sahip bir motor, invertör boyunca bir rezerv voltajı olduğunda iyi dinamik davranışlara sahiptir.
Belli bir daha yüksek frekans değerine ulaşıldığında, motorun arka EMF’si uygulanan voltaja eşittir ve akım kontrolü için rezerv voltajı yoktur.
Stator ve rotor akışının gerçek değeri istenen değerlerden uzaklaşır ve okuyucu dinamik bir kötü davranışa sahiptir. Arazi zayıflatma modundaki dinamik motor performansının iyileştirilmesi ilgi çekici bir sorundur.
Bu, rotor akısının genliğini ve dolayısıyla arka EMF’yi kontrol ederek yapılabilir, böylece temel hızın üzerindeki hız aralığında yeterli bir voltaj rezervi mevcuttur. Burada da, doğrudan ve dolaylı akış kontrol yöntemleri kullanılabilir.