İnverter inverter ile beslenen indüksiyon motoru sürücüsü:
İndüksiyon motoru okuyucu akım kaynağından beslenir – bir voltaj kaynağı invertöründe, indüksiyon ile beslenen indüksiyon motoru, statora uygulanan voltaj, sabit akışı korumak için statorun direnç düşüşü için bir düzeltme ile frekansla orantılıdır.
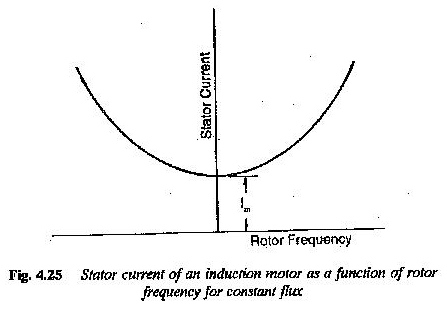
Bir indüksiyon motoru tarafından çizilen akımın, hava boşluğu akışı sabit olduğunda statorun frekansına bağlı olmadığı iyi bilinen bir gerçektir. Şek.
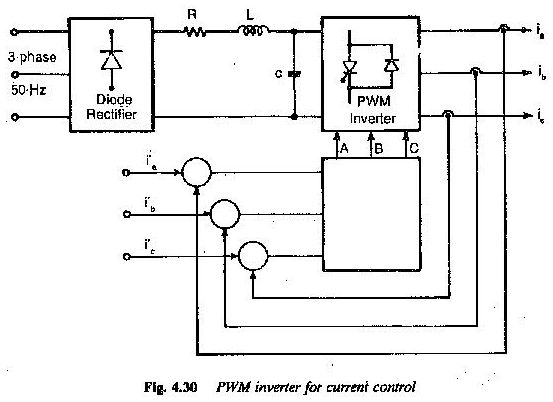
4.25. Motor kaymasını kontrol ederek stator akımı kontrol edilebilir. Bu nedenle dolaylı akış kontrolü mümkündür. Kontrol voltaj kontrolünden daha basittir. Kayma frekansı ile stator akımı arasındaki eğri eşdeğer devre kullanılarak hesaplanabilir. Motordaki istenen akımları sağlamak için bir PWM invertör kontrol edilebilir.
Bir CC Bond dönüştürücüde, CC bağlantı akımı kontrol edilirse, invertöre geçerli kaynak invertör olarak adlandırılır. CC bağlantısındaki akım yüksek bir endüktans ile sabit tutulur ve filtrenin kapasitesi dağıtılır.
Değişken CC bağlanma voltajı, endüktans vasıtasıyla akım kaynağında invertör invertörüne beslenen bir indüksiyon motoruna dönüştürülür. DC teklifi büyük empedanslıdır.
Bağlantı akımı sabit tutuldukça, çıkış akımı dalga formu, invertörün çalışması ile belirlenirken, çıkış voltajı yük empedansının doğası ile belirlenir.
Mevcut invertörde mevcut inverter ile beslenen bir indüksiyon motoru, harmonik akımlarla düşük empedansa sahip ve PF ünitesine sahip yükler için uygundur.
Mevcut invertör inverter ile beslenen bir indüksiyon motoru çok basit bir konfigürasyona sahiptir. Geri bildirim diyotları gerekmez. Akım kontrolü sağlamak için hattın yanında fazdaki kontrollü bir doğrultucu kullanılır.
CC bağlantısı sadece endüktans içerdiğinden, gerilimlerin polaritesini değiştirerek ve akımın yönünü koruyarak rejenerasyon mümkündür. Bu nedenle, dört kadrandan oluşan bir okuyucu basit ve basittir.
Besleme voltajı varyasyonlarından invertör çıkışının etkili tampon fırtınasını sağlar. Stator akımının doğrudan kontrolü, nispeten kolaylıkla kesin bir kapalı döngü kontrolünün uygulanmasını mümkün kılar.
İnvertörün değiştirilmesi yüke bağlıdır. Yük parametreleri anahtarlama devresinin bir parçasıdır. Bu nedenle invertör ve motor arasında bir yazışma gereklidir. Multimotor çalışması mümkün değildir.
İnvertör mutlaka ortak bir kuvvet olmalıdır, çünkü indüksiyon motoru invertörün reaktif gücünü sağlayamaz.
Sabit CC bağlantı akımı, invertörü kontrol ederek motor fazlarından akabilir ve bu nedenle motor akımı yarı-kare dalgasıdır. Motor voltajı, anahtarlama nedeniyle ranza noktaları ile neredeyse sinüzoidaldir.
Bu voltaj pikleri, thvristorların gerginliğinin değerlendirilmesine karar verir ve ayrıca motorun yalıtımını etkiler. Makinede küçük bir sızıntı reaktansı varsa veya iletişim kapasitörleri büyükse bu noktalar sınırlı olabilir.
Daha küçük bir sızıntı reaktansına sahip bir makine, voltaj piklerini ve harmonik kayıpları korumak için mevcut kaynağın invertör invertörünün indüksiyon motorunun çalışması için uygundur. Tork darbelerinin etkisi azalır ve çalışma frekansı arttırılabilir.
Anahtarlama kapasitesi, gerilim uçları ile en yüksek çalışma frekansı arasında uzlaşacak şekilde seçilir. Anahtarlama son minimum akım gerektirir. İnvertör, bir anahtarlama hatasından kurtulma yeteneğine sahiptir.
Bağlantı endüktansı, arıza akımında yavaş bir artışa neden olur ve yüksek değerlere ulaştığında kusur ortadan kaldırılabilir.
Okuyucu hafif yüklerde stabilite problemleri ortaya çıkar. Açık döngünün çalışması mümkün değildir. Çok geniş bir hız kontrolüne sahiptir, ancak dinamik performans zayıftır.
Tahrik motoru harmonik kayıplar ve ilişkili ısıtma nedeniyle daralma gerektirir. Rotor akışındaki ek harmonikler nedeniyle tork pulsasyonları mevcuttur ve genlikleri düşük çalışma sıklığında büyüktür. Faz kontrolü nedeniyle çizgi güç faktörü zayıftır.
Nominal frekansa kadar, okuyucu sabit tork modundadır ve okuyucunun sürekli at gücü modunda olduğu nominal frekansın üzerindedir.
Değişken bir frekansta çalışan bir indüksiyon motorunun stator akımı, değişken voltaj güç kaynağı, hava şekli akışı sabit tutulursa stator frekansından bağımsızdır. Ancak, rotorun frekansına bağlıdır.
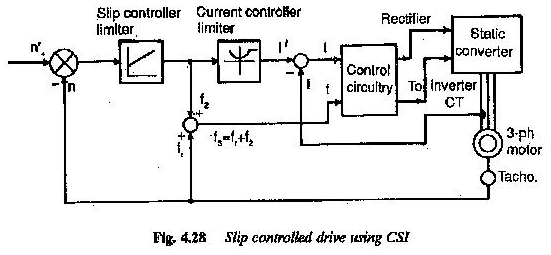
Geliştirilen tork ayrıca sadece rotorun frekansına bağlıdır. Bu özellikler kullanılarak, bir indüksiyon motoru tedarik etmek için bir akım kaynak invertör kullanılarak kayar kontrollü bir okuyucu (Şekil 4.28) geliştirilebilir.
Aerogap’taki nominal akış için rotor frekansı ile stator akımı arasındaki ilişki kontrole sokulur. Böylece dolaylı akış kontrolü mümkündür. Fonksiyon jeneratörünün çıkışı akımın referans değerini verir.
Ölçülen akım referans değeri ile karşılaştırılır ve hata, hattın yan tarafında kontrol edilen dönüştürücünün çekim açısını değiştirmek için kullanılır.
Fonksiyon jeneratörünün girişi, referans hızı ile gerçek hız arasındaki farktır ve stator frekansının değerini veren rotorun hızına karşılık gelen frekansa eklenen bir kayan frekans olarak düşünülebilir ve makine tarafındaki invertör bu frekansı vermek için kontrol edilir.
Rotor gerekli kayma frekansıyla istenen hıza ulaşana kadar kontrol çalışır.
Slide tarafından kontrol edilen okuyucu aşağıdaki avantajları sunar:
1. Kontrollü kayma okuyucu çok etkilidir.
2. Geniş bir hız aralığında hassas tork kontrolü mümkündür.
Kayan frekans, arıza torkuna karşılık gelen değer için herhangi bir değer olabilir. Operasyon çok iyi bir güç faktörüdür. Operasyon çok kararlı.
4. rotor, rotorun frekansını uygun bir değerde tutarak sabit ve bilgilendirilmiş bir torka hızlandırılabilir. Hızlı ivme.
5.com Bu, motorun rotor akımlarını bloke ettiğini ve ilişkili voltaj fişlerinin orada olmadığını görmediği yumuşak bir başlangıç yapmaya yol açar.
6 Başlangıç torkuna sahip özel rotorlar gerekli değildir. Düşük dirençli rotorlar, kayıpların sınırlı olması için kullanılabilir.
7. Rejeneratif frenleme dahil edilebilir. Sabit bir tork için fren yapmak mümkündür.
8. Okuyucu, tiristorize bir CC oynatıcı ile karşılaştırılabilir bir verimliliğe sahiptir.
Yüksek güç / ağırlık oranı, daha az bakım, düşük atalet, güç aralıkları ve hız aralıkları üzerinde sınırlama yok gibi, sincap kafesinin indüksiyon motorlarının ek avantajları, kaymayı diski DC motor okuyucularına gerçek bir rakip olarak kontrol etmesini sağlar.
Seçilen harmonik eleme yöntemleri veya PWM prensipleri, özellikle düşük hızda tork darbelerinin etkilerini azaltmak için kullanılabilir.
Bu yöntemlerde, kontrol CC bağlantı akımının kontrol edilmesiyle elde edilebilir ve PWM prensibi daha sonra sadece mevcut dalga şeklinin harmonik içeriğini kontrol etmek için kullanılabilir.
Mevcut ve harmonik kontrol fonksiyonlarının bu ayrılması, sadece motor tork titreşimlerini iyileştirecek ve harmonik kayıpları azaltacak olan PWM kontrol stratejisinin seçimine izin verir.
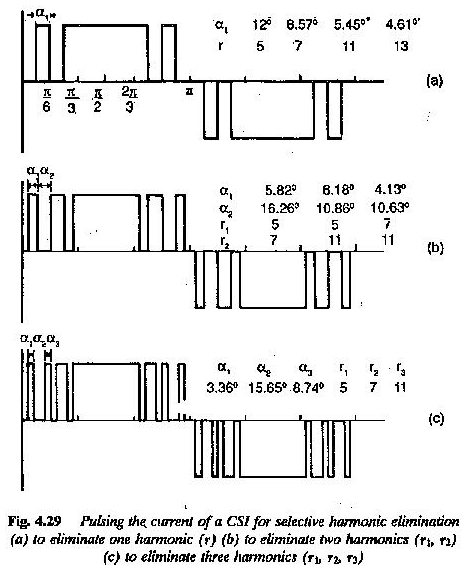
Mevcut kaynak invertördeki bir indüksiyon motoru için PWM stratejilerinin çoğu, seçilen harmonik eliminasyon tekniklerine dayanmaktadır.
Stator akımının durumunun harmoniklerini ortadan kaldırmak için kullanılırlar ve yöntemler düşük tork dalgalarının ortadan kaldırılmasına neden olur (Şekil 4.29).
Son yıllarda, PWM stratejileri, torkun titreşimi nedeniyle nehir hızı dalgalanmasını en aza indirmek için özel olarak geliştirilmiştir, düşük hızda düzgün rotasyon ile eğitime neden olmak için (Şekil 4.30).
Mevcut invertörün invertörüyle beslenen indüksiyon motorunun genel özellikleri aşağıdaki gibi özetlenebilir:
1. İndir Bağımlı Anahtarlama: Yük parametreleri anahtarlama devresinin bir parçası olduğundan, invertör ve motor görünmelidir.
2. İnvertörün basit bir konfigürasyonu vardır. FWD’ler yok.
3. Benzersiz bir motor işlemi
4. CC bağlantısı sadece endüktans içerir. Sabit bir akımı korumak için çok önemli olmalıdır. İki kadranın çalışması basittir
5. Artış, hattın kenarında fazda kontrollü bir doğrultucu gereklidir. Değişken CC bağlanma voltajı, yüksek bir bağ endüktansı vasıtasıyla sabit bir akım kaynağına dönüştürülür.
6. İnvertör, motoru güçlendirmek için değişken frekans akımları vermek için zorludur.
Kapasite değeri, voltaj pikleri ile en yüksek çalışma frekansı arasında bir uzlaşmadır. Kapasite daha büyüktür, gerilim daha küçüktür, en yüksek çalışma frekansı da sınırlıdır.
8. Motor sızıntılarının reaktansı harmonik gerilimleri etkiler. Anahtarlama sırasında voltaj piklerinden de sorumludur.
Sızıntıların anahtarlama devresinin bir parametresi olan reaktansı, anahtarlama süresini belirler ve bu nedenle daha yüksek operasyonel frekans sınırlıdır.
Bir motor, harmonik voltajları ve voltaj piklerini azaltmak ve hız kontrol aralığını arttırmak için daha küçük bir sızıntı reaktansına sahip olmalıdır. Tepeler, tristörün değerlendirilmesini etkiler ve yalıtımı etkiler. Sızıntı reaktansı küçükse motorun boyutu büyür.
9. Dönüştürücü kalitesi tristörler yeterlidir. Thiristor kullanımı iyidir
10. Landers, anahtarlamanın başarısızlığından kurtulur. Bağlantı endüktansı, arıza akımında yavaş bir artışa neden olur ve yüksek değere ulaştığında silinebilir.
11. Hafif yük stabilitesi problemidir. Anahtarlama için minimum bir akım olmalıdır.
12. Çalışma döngüsü özellikleri mümkün değildir. Dinamik cevap yavaş
13. PF hattı faz kontrolü nedeniyle vasattır.
14. Uygulamayı ortalama olarak yüksek eğitime yerleştirin
15. Nabızlar çok düşük hızlarda hız salınımlarına neden olur. PWM stratejileri, hız salınımlarını kaldırmak ve sorunsuz bir şekilde çalıştırmak için kullanılır.
16. Bu sabit tork ve sabit atların güç işlemleri mümkündür.