İndüksiyon motoru çalışma prensibi:
Şekil 9.4’teki indüksiyon motorunun çalışma prensibi, bir indüksiyon motorunun çapraz bölüm görünümünü göstermektedir. Stator, üç fazlı bir V / faz voltajı güç kaynağı ve f frekansı F Hz’den güçlendirilmiştir. Rotor, statorun çok fazla kutup için 3 aşamada yaralanır ve kısa devre. Stator’un direncinin ve sızıntıların reaktanının her ikisinin de ihmal edilebilir olduğu varsayılmaktadır.
![]()
Veya
- E1 = Stator / faz tarafından indüklenen EMF
- KW1 = Stator sarma faktörü
- NPH1 (Seri) = Stator Tourne / Faz Serisi
- ΦR = Ortaya çıkan akış / hava kutbu
Denklemden görülür. (9.1) Rotor üzerindeki mevcut yük koşullarından bağımsız olarak, hava zammında kurulan akış / kutup sabittir, yapılan hipotez için uygulanan voltaja bağlıdır.
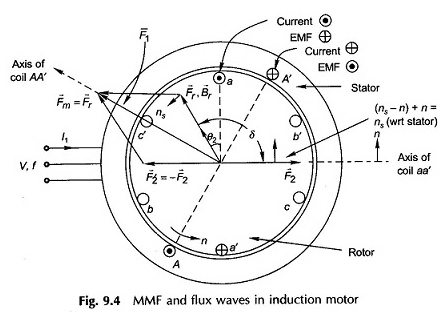
Stator tarafından çizilen 3 dengeli 3 faz akımıyla ilişkili olduğu için, φR üretiminden sorumlu olan B̅R ile ilişkili akış yoğunluk vektörü ile MMF f̅r vektörü.
B̅R ve rotor arasındaki bağıl hız, kısa devre yapılan rotorda bir akım paterninin indüklenmesine neden olur.
B̅R’nin etkileşimi ve rotorun akımları ile üretilen tork, nispi hızı azaltmak için rotoru B̅R’nin dönüş yönünde hareket ettirme eğilimindedir.
Bu nedenle motor kendinden korkutucudur ve rotor sabit bir hız kazanır
Şekil 9.4, f̅r, b̅r (hava boşluğu mmf ve akış yoğunluğu), f̅2 (rotor mmf) vektörlerinin nispi konumunu gösterir;
Bununla birlikte, θ2 açısı çok küçüktür, çünkü rotorun reaktansı rotora karşı dirençten çok daha küçüktür. MMF stator vektörü daha sonra
![]()
vektör diyagramında bulunur. Diyagram çizildiği sürece, stator ve rotor fazı A (tek bir bobin şeklinde temsil edilir) mümkündür. Okuyucu, doğru kuralı uygulayan bir akım aşamasından vektörlerin yerini kontrol edebilir.
Rotor akımlarının kayma ve sıklığı:
Şekil 9.4’e referans olarak, B̅R’nin rotor sürücülerine (B̅R yönünde) göre hızda (ns – n) hareket ettiği kolayca gözlenir. Bu kayma hızı olarak bilinir. Vardiya olarak tanımlanır

Açıkçası S = 0 için s = 1, yani sabit rotor için ve n = ns için s = 0, yani senkron bir hızda çalışan rotor için.
Rotorda indüklenen akım sıklığı
İndüksiyon motorunun çalışma prensibinin tamamen yüklenmesi ile normal bağırış, rotor akımlarının sıklığı 1 ila 4 Hz kadar düşüktür.
S = 1’de (vites rotoru) EMF fazına göre rotor,
![]()
Herhangi bir vardiyada, rotorun SF frekansı, Rotor tarafından EMF indükler SE2’ye dönüştürülür. Şimdi rotor devresinin empedansını düşünün
![]()
Veya
- X2 = Durulduğunda rotorun rotor reaktansı (rotor frekansı = stator frekansı, f)
Rotor slip s’de çalıştığında, frekansı SF’dir, empedansı
![]()
Bu nedenle, rotor akımlarının sıklığının, indüklenen FEM ve reaktansının, kayma ile doğrudan orantılı olarak değiştiği bulunmuştur. Şekil 9.5, kayma s ile rotor devresini göstermektedir. Devre faz açısı
MMF ve Rotor Tork Üretimi:
Şekil 9.4’te, B̅R’ye neden olan akış yoğunluğu vektörü rotora göre hızda (ns – n) çalıştığından, b̅r, düşüşün önünde 90 ° ‘de olduğunda rotor bobin aa’ (sürücü A’daki nokta ile gösterilir ve sürücüye geçiş) ile maksimum pozitif EMF indüklenir.
Rotordaki akım θ2 EMF’sinin gerisinde kaldığından, b cor θ2 açısıyla daha da ilerlediğinde AA ‘bobinindeki akım maksimum pozitif olacaktır. Şu anda Rotor F̅2’nin MMF vektörü AA ‘bobinin ekseni boyunca olacaktır.
Bu nedenle, B̅r (veya f̅r) ‘nin F̅2’den önce δ = (90 + θ2) açısında olduğu görülmektedir. Ek olarak, F2 = SF frekansının akımlarından kaynaklanan F̅2, rotorun sürücüsüne (NS – N) ve Hız NS’deki sürücüye kıyasla çalışır.
Stator ile ilgili olarak, rotorun kendisi Stator’a kıyasla aynı yönde hareket eder.
Bu nedenle, f̅r ve f̅2, statora kıyasla senkron bir hız ns’de hareket eder ve F̅2’nin önünde açı (90 ° + θ2) önünde bulunan diğerlerine göre sabittir.
Rotor alanının ve ortaya çıkan alanın etkileşimi, F̅r’ın dönüş yönünde bir çift oluşturur.
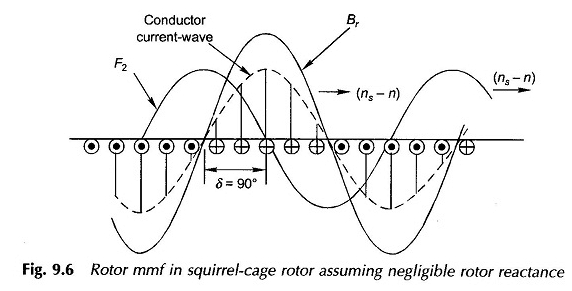
Şimdi sürücülerin rotorun çevresine eşit olarak yayılmış sincap rotorunun durumunu düşünün. Rotor MMF F2’nin reaksiyonu, Şek.
9.6 Rotorun sabit olduğu ve kahverengi dalga – kayma hızında (NS – N) karşılaştırıldığı düşünülür. Rotor reaktanının ihmal edilebilir olduğu düşünülür, böylece sürücünün akımlarının (kısa devre) EMF sürücüsü ile uyumlu olması.
Bu nedenle sürücünün akım paterni sinüzoidal olarak ortadan kaldırılır ve uzamsal fazda kısa ve senkronize olarak hareket eder. Rotor MMF dalgası, çiğ dalganın onunla hareketi ile aynı sayıda kutuplu depolanmış bir sinüzoidaldir.
Temel (F2), Şekil 9.6 BR’nin yasalarında 90 ° ‘de temsil edilmektedir. Rotorun reaktansı artık sahnelenirse, sürücünün akım dalgası ve bu nedenle rotor MMF dalgası θ2 açısıyla geç olacaktır.
Böylece, BR ve F2 dalgası arasındaki açı, yaranın rotorundaki ile aynı olan (90 ° + θ2) olacaktır.
Bu nedenle bir sincap -cake rotor, bir yara rotoru ile aynı şekilde tepki verir, ancak fazların sayısının açık olmaması – çubuklar / kutuplar kadar çok aşamaya sahip olduğu düşünülebilir. Bir sincap kafesli rotor her zaman üç fazlı eşdeğer bir yara rotoru ile değiştirilebilir.
Denklemden görülür. (9.8) düşük reaksiyon rotorundan (zayıf θ2 = Tan-1 JSX2 / R2) verilen φR, F2 ve S için daha büyük bir çift üretecektir.
Bir kafes sincap motoru, bu konuda yara rotorunun bir motoruna kıyasla daha yüksektir, çünkü kafes rotoru daha düşük bir reaktansı vardır, çünkü sarma çıkıntısı yoktur.
Burada indüksiyon motorunun çalıştırılması prensipinde yapılabilecek çok önemli bir gözlem, rotor akımlarının bir SF frekansına sahip olmasına rağmen, bunların neden olduğu MMF’nin (F2) statora kıyasla eşzamanlı bir hızda çalışmasıdır.
Başka bir deyişle, rotor akımlarının reaksiyonu, stator yerine stator yerine yerleştirilmiş sabit bir silindirik yapı üzerinde akan statorun frekans akımlarına (f) karşılık gelir.
Veya başka bir şekilde koymak için, statorun rotor akımları görünümleri f frekansına sahiptir, ancak aynı rms değerine sahiptir.
MMF Stator F̅1 vektörü, vektör denkleminin Şekil 9.4’ünde yer almaktadır.
![]()
Ayrıca, F̅1 bileşenlere bölünebilir.
![]()
F̅2’nin F̅2’ye karşı olduğu ve büyüklüğe eşit olduğu yerlerde
![]()
EQ vektörüne karşılık gelen F̅1’e neden olan stator akımı. (9.10), bileşenlere bölünmelidir
![]()
Burada, MMF FR’ye neden olan bir mıknatıslama akımı olarak tanınabilir ve sonuçta ortaya çıkan akış / kutup, rotor i2’nin akımının f2 reaksiyonunu dengeleyen stator akımının bileşeni.
Şekil 9.4 ayrıca stator Aa ‘bobininin göreceli yerini ve akımın pozitif yönünü göstermektedir. Bu anlık vektör görüntüsü, i2’nin maksimum pozitif değeri olduğunda geçerlidir.
F’2’nin F2’yi iptal etmesi için, MMF rotorunu dengeleyen stator akım bileşeni, statorda gösterildiği gibi rotorun akımıyla uyumlu olmalıdır.

Genlikler açısından, F’2, F2’nin karşısında yönlendirilir, böylece I2 ve I2 denklemin orantılılığına uymalıdır. (9.13) ve fazda olmalıdır.
Ek olarak, Şekil 9.4’e referansla, statorda EMF E1’in pozitif yönünün I1’in pozitif yönüne karşı olduğunu, rotorda I2’nin pozitif yönünün SE2’nin pozitif yönünde olduğunu kolayca görebiliriz. Bu, transformatör durumuna benzer.
Şekil 9.4’teki gibi işaretlenmiş stator Aa ‘bobininde pozitif bir akımın yönü ve kolokyumun ekseninin yönü belirtildiğinde, akıma karşı olumlu bir EMF verecek indüksiyon yasası

İndüksiyon motorunun bu çalışma prensibi, transformatör muhafazasında kullanılanla aynı işarete sahiptir, böylece φR akış fazı ve 90 ° ‘nin geç E1 oluşturur. Devre modelinde, IM bu nedenle E1 yoluyla XM mıknatıslama reaktansı ile çizilir.