Eşdeğer indüksiyon motor devresi:
Eşdeğer indüksiyon Motor Devresi – İndüksiyon makinesinin davranışı alan temel fenomen açısından incelenmiştir. Buradaki girişim kasıtlı olarak indüksiyon motoru transformatörünün benzetmesine odaklandı. Şimdiye kadar kurulan bazı gerçekler aşağıda özetlenmiştir:
1 ve 1

burada E2 = EMF kararının rotoru.
Ek olarak, I’2 E1 ve I2’nin pozitif terminaline akar. E2’nin pozitif terminalinden akar. Ek olarak, I2, Stator’un gösterdiği gibi, stator F frekansının akımıdır ve stator tarafından çekilen akımın MMF F2’yi dengelemek için bileşeni olan 2 ile uyumludur.
2. Bir transformatörde olduğu gibi, stator akımının IM mıknatıslama akımı bileşeni, 90 ° ‘lik stator E1 tarafından indüklenen EMF’nin arkasında gecikiyor.
3. İndüksiyon motoru sadece voltajı ve akım seviyelerini değiştiren bir transformatör değildir. Aslında, frekansın da kayma orantısına dönüştürüldüğü genelleştirilmiş bir transformatör olarak davranır, böylece EMF rotor tarafından indüklenir ve rotorun reaktansı SX2’dir.
İndüksiyon motoruna eşdeğer devre, statorun direncinin ve sızıntı reaktanının serisinin (gruplandırılmış) elemanlarının modele dahil edildiği Şekil 9.7 (a) ‘da olduğu gibi faz tarafından çizilebilir.
Stator ve rotor devrelerini birleştiren transformatör, E2 durağının rotorunun voltajının ve rotor i2’nin akımının transformasyon oranı A ile stator miktarlarına bağlı olduğu ideal bir genel transformatördür, frekans parametresi, rotorun devresinde slissement s, bir mekanik parametre yoluyla görünür. Mekanik çıkış gücü, şekilde belirtilen ağaçta görünür.
Rotor devresi, rotor devresini değiştiren iki adımlı bir işlemle stator tarafına sevk edilebilir, böylece dönüş oranı birim olacak ve daha sonra statorun frekansına eşdeğer bir rotor devresinden kaynaklanan bir frekans dönüşümü gerçekleştirir.
Rotor voltajını A ile çarparak ve rotorun akımı 1 / a ile, rotorun empedansı için değiştirilir

Bu dönüşümde güç değişmez kalır. Rotor devresi, bu adımı gerçekleştirdikten sonra, Şekil 9.7 (b) ‘de çizilir. Bu, stator ile birim dönüş oranı ile rotoru eşdeğer bir rotora indirir.
Şekil 9.7 (b) ‘e eşdeğer rotor devresinden

Hem pay ve paydayı s tarafından bölün

Bu basit uç stator frekansındaki rotor devresini ifade eder. Değiştirilmiş rotor devresi şimdi rotor ve stator devresinin aynı frekansa sahip olduğu Şekil 9.7 (c) ‘de çizilmiştir, ideal transformatör artık sabit bir birim oranı transformatörüdür.
Rotor devresini stator frekansına yönlendirerek reaktanın sabit (x’2) ve direncin değişken (R’2 / s) haline geldiği de fark edilmektedir. Denklemin dönüşümü. (9.15b) değişmez güç değildir (akım aynı kalırken gerilim değişir).
Ortaokula aktarılan güç şimdi hem rotorun bakır kaybını hem de mekanik gücü (elektrik formunda) açıklıyor. Bu, mekanik gücün bir ağaç yoluyla çıkarıldığı Şekil 9.7 (a) ile tezat oluşturur.
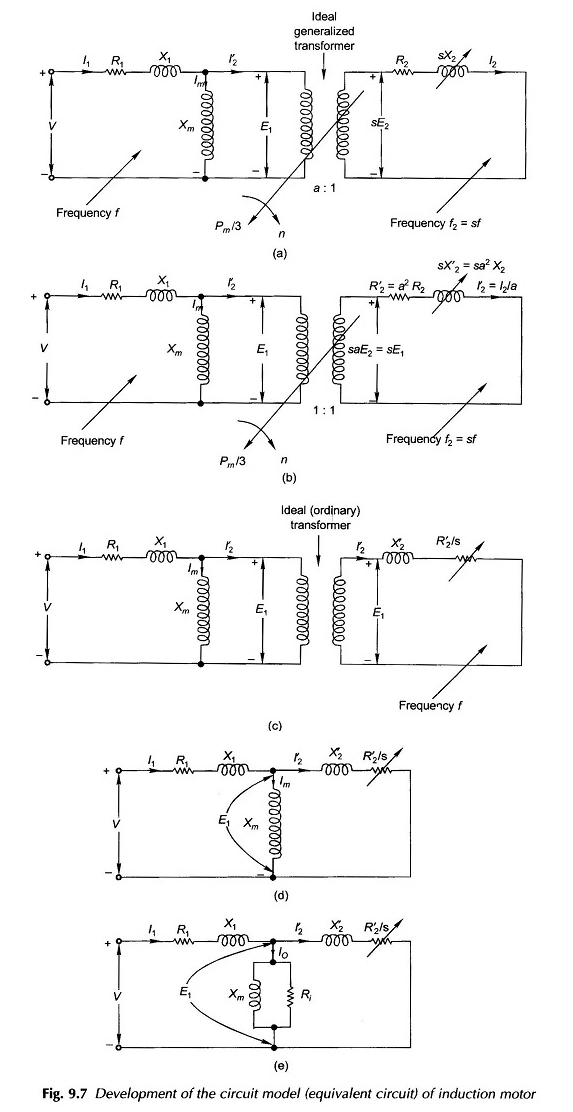
Eşdeğer indüksiyon motor devrelerinin geliştirilmesinin son aşamasında, ideal birim oranı transformatörü (sıradan) artık Şekil 9.7 (d) ‘de devre modeli ile sağlanabilir.
Demir kaybının statordaki temsili, transformatörün devre modelinde olduğu gibi XM ile paralel bir direnç RI yerleştirerek Şekil 9.7 (d) ‘nin devre modeline sezgisel olarak sokulabilir. İndüksiyon motoruna eşdeğer bu devre Şekil 9.7 (e) ‘de tasarlanmıştır.
R’2, rotorun bakır kaybını farklı bir varlık olarak temsil etmek için R’2 / s’den ayrılırsa, devre modeli, R’2 (1 / s – 1) değişken direncinin elektrik formundaki mekanik çıkışı temsil ettiği Şekil 9.8 (a) ‘da çizilebilir. Alternatif olarak, Şek.
9.8 (b) kullanılabilir (bu, demir la kaybına karşı direncin ihmal edildiği ve bu kaybın brüt mekanik çıkıştan (R’2 (1 / s – 1) emilen güç) çıkarılacağı Şekil 9.7 (d) ‘e karşılık gelir.
Bu, bir indüksiyon motorundaki normal kayma aralığında tamamen kabul edilebilir olan bazı yaklaşımlara eşdeğerdir. Ek olarak, bu devrenin parametreleri (RI değerine ihtiyaç duymayan) iki yüksüz test ile kolayca elde edilebilir.
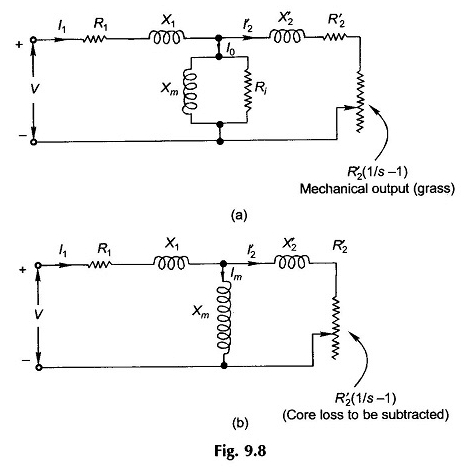
Şekil 9.8 (b) ‘deki devre modeli, aşağıdaki tartışmanın çoğu için kullanılacaktır. Burada R’2 (1 / s – 1) ‘de dağıtılan gücün, brüt mekanik gücü elde etmek için çıkarılması gereken temel kaybı içerdiğini not edebiliriz.
Açık bir mekanik güç elde etmek için rüzgar ve sürtünme kaybı daha fazla çıkarılmalıdır. Temel rüzgar kaybı ve kaybı ve sürtünme kaybı rotasyon kaybı olarak gruplanır, çünkü bu iki kayıp motor çalışırken ortaya çıkar.
Bir indüksiyon motorundaki dönüş kaybı, sabit bir voltaj için önemli ölçüde sabittir ve motorun hızı, tam yükte tam yükten çok az değişir.
Not: Net mekanik güç = ağaç gücü