İndüksiyon motoru frenleme:
Üç tür indüksiyon motoru frenleme, yani rejeneratif, dinamik ve karşı akım frenleme de indüksiyon motorları ile gerçekleştirilebilir.
Rejeneratif frenleme
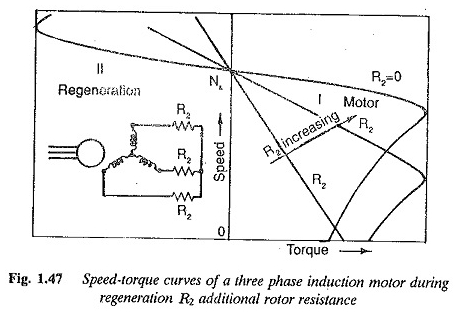
Bir indüksiyon motorunun rotoru stator alanından daha hızlı çalıştığında, kayma negatif olur ve makine güç üretir. Bu nedenle, motor döner alandan daha hızlı çalışma eğiliminde olduğunda, rejeneratif frenleme meydana gelir ve
Döner parçalar sektöre iade edilir. Tork hız eğrisi ikinci çeyreğe uzanır (Şekil 1.47). Motor hızı azalır. Fren torku, motoru sabit hızda çalıştırır ve daha hızlı dönme eğilimini durdurur.
Stator’a karşı direnç etkileri nedeniyle, rejenerasyon sırasında geliştirilen maksimum tork, manşon sırasında maksimum torktan daha yüksektir. Palans ve vinçlerde, tahrik motoru senkron hızdan daha hızlı çalışma eğilimindedir.
Bu durum, vinç boş bir kafes yükselttiğinde meydana gelir. Karşı ağırlık nedeniyle, kasa tehlikeli hızlar elde edebilir. Geçiş neredeyse otomatik olarak gerçekleşir ve hızlanma ve rejenerasyonu durdurmak için bir çift geliştirilmiştir.
Yükün yükü sırasında yük motoru revize ettiğinde bu tür çalışma da mümkündür. Otomatik rejenerasyon aşırı hızlanmayı durdurur. Daha iyi fren torku elde etmek için rotor direnç kontrolü kullanılabilir.
Hız yüksekten alçaktan geçtiğinde bir kutup değişim motoru ile rejeneratif frenleme de mümkündür. Ayrıca değişken bir frekans okuyucusunda da gerçekleştirilebilir.
Motorun frekansını geçici olarak azaltarak, senkron hız azalır ve rejenerasyona uygun koşullar gerçekleşir.
Rejeneratif frenleme sırasında, frenleme sırasında çalışma noktası özelliğin kararsız kısmına düşerse tehlikeli hızlar olasılığı vardır. Bu, yükleme torku motor arızası torkundan daha büyükse olur.
Geliştirilen tork motoru yavaşlatamaz ve aşırı hızlanma gerçekleşir. Bu olasılık, rotordaki yüksek dirençle ortadan kaldırılabilir.
Dinamik frenleme
Dinamik frenleme, tersine dönmeyen bir okuyucuyu frenlemek için kullanılır. Stator, sektörden AC’den ana yemeklere aktarılır (Şekil 1.48 (a)). Stator geçiş DC sabit bir alan kurar. Bu, rotoru hızlı bir şekilde getirmek için bir çift üreten rotor akımlarını indükler.
Tork gelişti ve frenleme sırasında gecikme DC güç miktarı ile kontrol edilebilir. Stator ve rotor devrelerindeki ek direnç R1 ve R2E sırasıyla DC uyarımı ve fren çiftlerini kontrol eder.

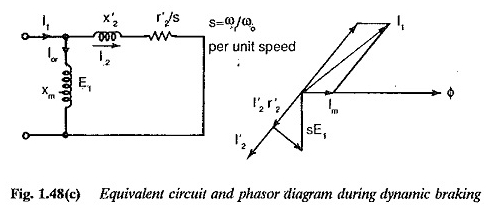
Dinamik frenleme sırasında eşdeğer devre ve motor faz diyagramı Şekil 1.48 (c) ‘de temsil edilmektedir. Stator DC’den güçlendirildiğinde, MMF ürünü sabittir. Bu MMF, DC güç kaynağı için stator bağlantılarına, tur sayısına ve akıma bağlıdır.
DC güç kaynağı için olası stator bağlantıları Şekil 1.49’da temsil edilmektedir. Eşdeğer CC akımı, bu eşdeğer akım ve CA akımı tarafından üretilen MMF’lerin asimile edilmesiyle belirlenebilir.
Eşdeğer birincil akım, torkun mıknatıslanmasından ve ikincil akımından sorumludur. Çift tarafından verildi

Vardiya nerede.
Sahip olduğumuz eşdeğer devrenin

Ayrıca, faz diyagramından
![]()
Hangi MI belirlenebilir. XM değeri tarafından verilir
![]()
Çift

Tork sürgülü eğri bu ifade kullanılarak belirlenebilir. Maksimum tork bir vardiyada meydana gelir

Ve maksimum fren torku

Karakteristik, ilişki kullanılarak da çizilebilir

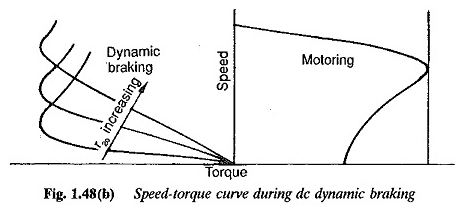
Fren torku i21 ile orantılıdır. Bununla birlikte, doygunluk kendi rolünü oynar ve bir çiftin tükenmesi vardır. R′2’nin etkisi, sürüş sırasında etkilere benzer, yani
TMB’nin değerini değiştirmez, ancak TMB’nin meydana gelme hızının değerini değiştirir. Tipik hız hız eğrileri Şekil 1.48’de temsil edilmektedir.
I1 ve R′2 değerleri istenen frenlemeyi sağlamak için kontrol edilir. Birincisi R1 ile sınırlıdır. Bu yöntem genellikle aktif yüklere neden olan motorları yavaşlatmak için uygulanır. Dinamik fren otomatik kontrol ile birlikte kullanılır. İndüksiyon motoru frenleme, bu işlevsellik nedeniyle Palans’ta DC motorundan daha popülerdir.
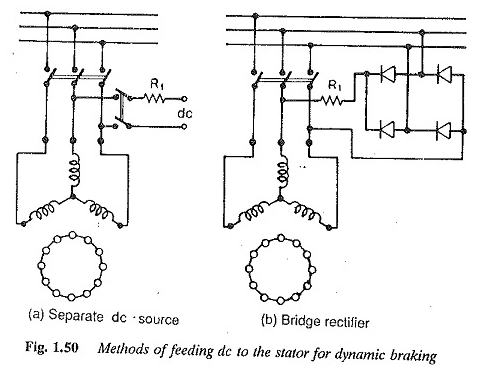
Bir stator doğrudan güç kaynağının besleme yöntemleri Şekil 1.50’de temsil edilmektedir. DC heyecanını kontrol etmek için devrede sınırlı bir direnç R1 kullanılarak bir CC güç kaynağı tarafından sağlanabilir. Tork kontrolü rotor direncindeki varyasyon ile elde edilir.
Alternatif olarak, bir güç kaynağı bir diyot doğrultucu vasıtasıyla düzeltilebilir ve elde edilen DC motora aktarılabilir.
Dinamik AC frenlemesinde, stator bir kapasite bankasına gitti. Makine heyecanlı bir otomatik indüksiyon jeneratörü olarak çalışır. Tüm mekanik enerji, rotor direncinde elektrik enerjisi şeklinde dağıtılır. Bu yöntem, kapasitörlerin maliyeti nedeniyle karlı değildir.
Akım
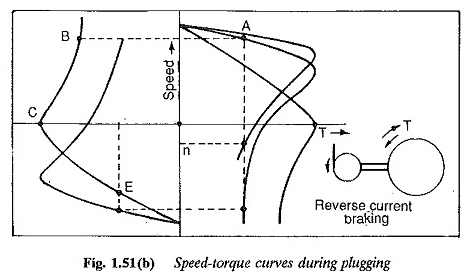
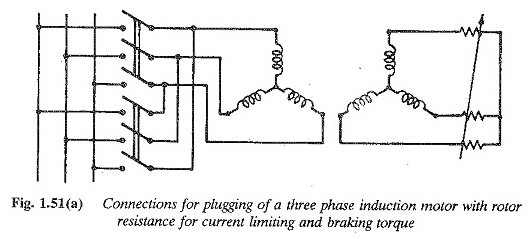
Girişin faz sırasını bir indüksiyon motoru frenlemesine değiştirerek, stator alanı direksiyonu tersine çevrilebilir. Uygulamada, bu motorun güç kaynağının değişmesi ile yapılır (Şekil 1.51 (a)).
Fren torku geliştirilir ve motor çok hızlı bir şekilde durur. Sıfır hıza yaklaşıldığında motor sektörden söndürülmelidir. Aksi takdirde, geliştirilen tork motoru ters yönde hızlandırır. Bu yönteme fişler de denir.
Motor bloke edildiğinde, çerçevede E ile indüklenen voltaj ve uygulanan voltaj V karşılıklı olarak verilebilir ve fren sırasında akıma E + V’den kaynaklanır.
Bu, rotora karşı yüksek dirençle sınırlı olan ve ayrıca fren torkunu etkili bir şekilde arttıran çok yüksek akımlara yol açabilir.
Bir indüksiyon motorunun dişli hız eğrisi, rotora karşı direnç değiştirilerek değiştirilebilir. Maksimum tork noktası, gelişmiş çiftin rotoru frenleme eğiliminde olduğu 1-2 vardiya plajında meydana gelebilir.
Bu tork, bir sebep veya diğerini hızlandırmak için rotor eğilimini durdurmak için de kullanılabilir (örneğin, motor revizyonu veya boş kafesi arttıran bir ipucu).
Rotora yüksek direnç sokulur, böylece çalışma noktası dördüncü çeyreğe geçer. Geliştirilen fren torku, rotorun herhangi bir hızlanmasını önler ve rotorun tek tip bir hızda çalışması (Şekil 1.51 (b)).
Motor fiş zamanında bir vardiyada çalışırsa, toplam fren torku, (2 – s) bağlantı torkunun toplamı ve yükleme torku

TP, fren akımını sınırlayan değişken bir rotor direnci ile kontrol edilebilir.