İndüksiyon Motoru Hız Kontrol Yöntemleri:
Senkron bir motorun hızını kontrol etmenin tek yolu, V / F’yi sabit tutmak gibi frekans ve giriş voltajını kontrol etmektir. İndüksiyon motoru hız kontrolü ise aşağıdaki yollarla kontrol edilebilir:
- Stator voltaj kontrolü
- Frekans kontrolü
- Kayar kontrol
1. Stator voltaj kontrolü:
Bu, küçük motorlar ve yük torkunun hızla arttığı fan yükü için geçerlidir. Daha önce de belirtildiği gibi, stator voltajının RMS değerini kontrol etmenin iki yolu vardır – faz kontrolü ve döngünün tam kontrolü.
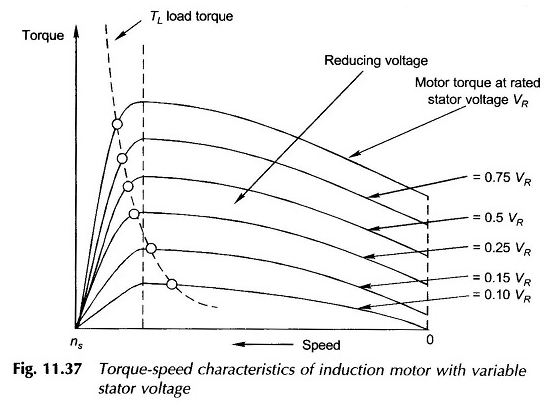
Stator voltaj kontrolüne sahip bir indüksiyon motorunun tork özellikleri Şekil 11.37’de çizilmiştir. Maksimum tork, gerginliğin karesi olarak azalır.
Şekil ayrıca, hız düzenlemesinin sadece torku hızla düşen bir yük için mümkün olduğunu göstermektedir. O zaman bile, düşük hızlar için hız düzenlemesi elde edilmez – hız keskin bir şekilde düşer.
2. Frekans Kontrolü:
Burada, giriş frekansı bir invertör vasıtasıyla değiştirilir; Normal frekans için, stator voltajı ayrıca hava zammına neden olan akış / sonrayı koruyan V / F sabitini korumak için değiştirilir.
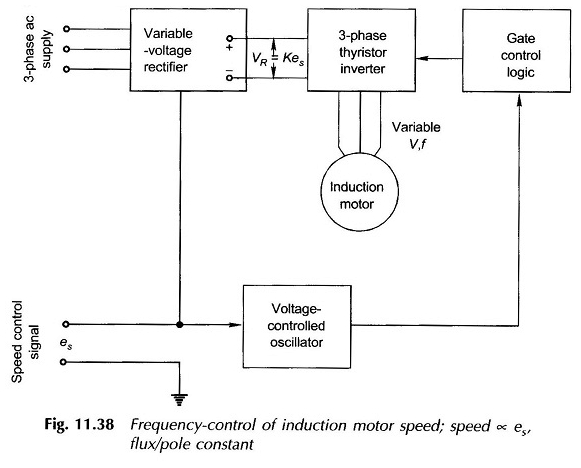
Frekans kontrolü kullanan tipik bir kontrol sistemi, Şekil 11.38’de şematik olarak gösterilmiştir. Büyük sermaye giderleri nedeniyle, bu sistem yalnızca indüksiyon motorunun sağlam ve bakım içermeyen özelliklerinin gerekli olduğu diskler için haklıdır.
Aksi takdirde, dönüştürücü kontrolüne sahip bir CC motor mantıksal ve ucuz alternatiftir. Frekans kontrol şemasının kalbi üç fazlı tiristör invertördür.

Değişken frekans kontrolü, sabit-V / F çift hızının özellikleri Şekil 11.39’da gösterilmiştir. Akış / direk sabit bir değerde tutulduğu için maksimum torkun değiştirilmediğini görebiliriz.
3. kayma kontrolü:
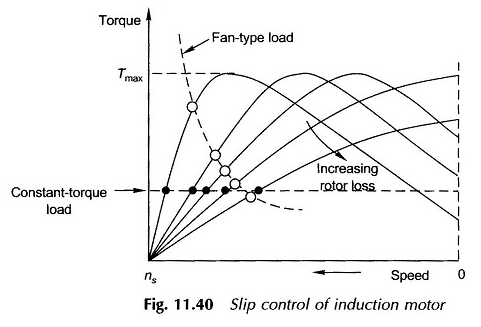
Bir yara rotor indüksiyon motorunun rotor devresine değişken bir direnç getirilerek, indüksiyon motorunun hızının alt senkron kontrolünün mümkün olduğu zaten bilinmektedir. Bu yöntem, Şekil 11.40’ta gösterildiği gibi geniş bir hız ve iyi başlangıç torku sağlar.
Bu durumda maksimum tork sabit kalır. Sabit tork ve fan tipi süreleri için iyi hız düzenlemesine ulaşılabilir.
İndüksiyon motoru hızının kontrolünün en büyük baskısı, rotorun dış direncinde boşa harcanan güç nedeniyle zayıf verimliliğidir.
Kayan kontrol yöntemi, rotor devresinde elektrik enerjisi kaybı meydana geldikçe indüksiyon motorunun kaymasının arttığı genel prensibe dayanmaktadır.
Değişken rotor devresinin kaybı, Şekil 11.41’de gösterildiği gibi sabit bir direnç sağlayan rotor devresindeki kontrollü bir dönüştürücünün giriş şeması ile elde edilebilir.
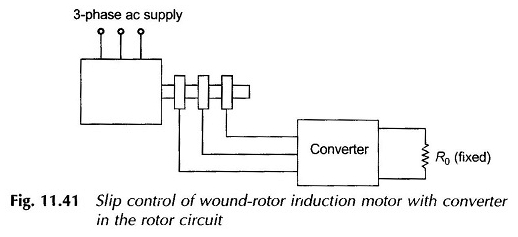
Kayma enerjisini harici bir dirençte boşa harcamak yerine, geri kazanılabilir ve arza yönlendirilebilir, böylece kayar kontrol yönteminin düşük verimliliğinin dezavantajını ortadan kaldırabilir.