İndüksiyon Motoru Tork Hız Özellikleri:
Denklemin. 1.27 Maksimum torkun rotor direncinden bağımsız olduğu görülebilir. Bununla birlikte, maksimum torkun meydana geldiği kayma, rotor direnci ile değişir.
Rotor direnci arttığında, maksimum tork için kayma da maksimum torktur ve motorun kararlı çalışma aralığı artar. Farklı rotor direnç değerleri için indüksiyon motoru torkunun hızının tipik özellikleri Şekil 1.22’de temsil edilmektedir.
Şekilden, rotora karşı direnç artırarak başlangıç torkunun artırılabileceğini not ediyoruz. Rotor direnci bir değere yükseltilirse, maksimum tork başlangıçta meydana gelir.

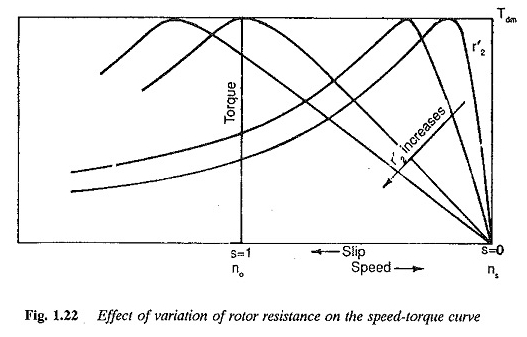
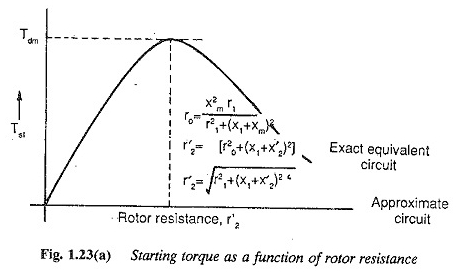
Stator’un empedansı ihmal edilirse, rotor direnci rotor sızıntılarının reaktanına eşit bir değere yükseltilmelidir. Rotor direnci bu değerin ötesine geçerse, başlangıç torku azalır.
Arıza torku birden fazla slaytlarda (fren bölgesinde) meydana gelir. Başlangıç akımı azalır ve başlangıç güç faktörü, artan rotor direnci değerleri için daha iyidir.
Tam yük kayması değişir, rotor direnci değiştiğinde sınırlı bir aralıkta hız kontrolünü kolaylaştırır. Bununla birlikte, verimlilik, kayıplardaki artış nedeniyle yüksek rotor dirençlerine değiştirilir. Rotorun ısıtılması, içsel olarak yüksek dirençli bir rotorda bulunur.
Kısacası, yarış performansı değişirken büyük rotor dirençleriyle motor başlangıç performansı geliştirilir.
Başlangıçta rotora karşı yüksek direncin avantajlarını elde etmek için, yaranın sürücü indüksiyon motorunun rotor devresine ek direnç bağlanır ve rotor hızlandıkça yavaşça kesilir. Nominal hızda, motor doğal özelliği üzerinde çalışır. Bağlantılar Şekil 1.23 (b) ‘de temsil edilmektedir.
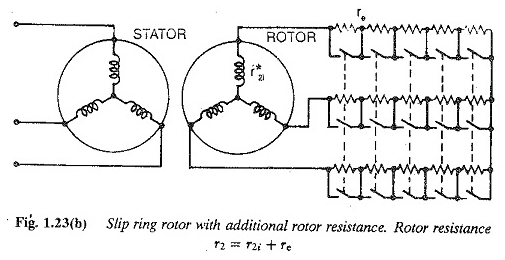
Bununla birlikte, sincap kafes motorlarında ilave direnç bağlantısı mümkün değildir. Çift kafes rotorlar ve derin çubuk gibi özel rotorların yapıları kullanılır.
Başlangıçta, yüksek rotor frekansı nedeniyle, akım bir çift kafes rutorunun dış kafesine veya bir derin çubuk rotor durumunda çubuğun üst kısmına dağıtır. Böylece yüksek dirençin etkisine ulaşılır.
Motor hızlandıkça, rotor frekansı azalır ve akım, çift kafes rotorunun iki kafesinde veya derin çubuğun rotorundaki tam çubukta dağıtılır. Etkili direnç küçük ve yarış performansı iyileştirildi. Tipik tork hız eğrileri Şekil 1.23’te temsil edilmektedir.
İndüksiyon motorundaki voltaj varyasyonunun etkisi:
Bir indüksiyon motorunun temel hız özelliği, indüksiyon motorundaki voltaj varyasyonunun etkisi ile değiştirilebilir. Nominal frekansta değişken voltajdan sağlandıklarında indüksiyon motoru torkunun hızının tipik özellikleri Şekil 1.24 (a) ‘da verilmiştir.
İndüksiyon motorunun (belirli bir slaytla) torkunun gerginliğin karesi olarak değiştiği gerçeğine dayanırlar. Maksimum tork için kayma gerginlikten bağımsızdır. Tam yük torku, voltaj değiştiğinde farklı kaymalarda oluşur.
Bu, indüksiyon motorlarının hız kontrolünü, tedarik voltajındaki değişikliklerle sınırlı bir aralıkta mümkün kılar. Bununla birlikte, hava boşluğu akışındaki azalma nedeniyle motor tork kapasitesi düşük voltajda azalır. Güç faktörü azalır.
Motor, düşük voltaj verilen tork geliştirmek için ağır akımlar çeker. Farklı voltajlara çizilen akım, Şekil 1.24 (a) ‘da ve farklı voltajlarda nominal bir akımda geliştirilen torkta gösterilmiştir.
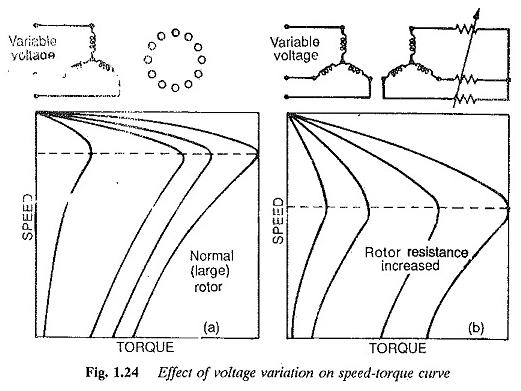
Şekil 1.24 (b), uygulanan voltaj hız hızı özelliğini değiştirmek için değiştiğinde rotordaki yüksek dirençin avantajlarını göstermektedir.
Hız kontrol aralığını artırmanın yanı sıra, düşük voltajlı motor tarafından çizilen akım, uygun bir rotor direnci seçimi ile sınırlandırılabilir.
İndüksiyon motorunda kutup değişimi:
Bir indüksiyon motorunun hız hızı eğrisi, farklı kutup setleri vermek için yeniden bağlantılı bir takviye sargısı ile değiştirilebilir. İndüksiyon motorunda direk sayısı değiştiğinde, aynı hız için de geçerlidir.
Bağlantı türü, sabit bir tork veya sabit bir güce izin verilen yüke karar verir. İndüksiyon motorundaki bu post değişim yöntemi sincap kafes motorları için uygundur çünkü rotorları belirli sayıda kutup benimseyebilir. Rotor sargısının yeniden bağlanması gerekmez.
Öte yandan, bir kayar halka rotoru kullanılırsa, farklı kutup setlerine yeniden bağlanmalıdır. Ortaya çıkan sonrası sarma yeniden bağlanma için kullanılır. Bobin adımı farklı hızlarda etkili bir şekilde değişir.
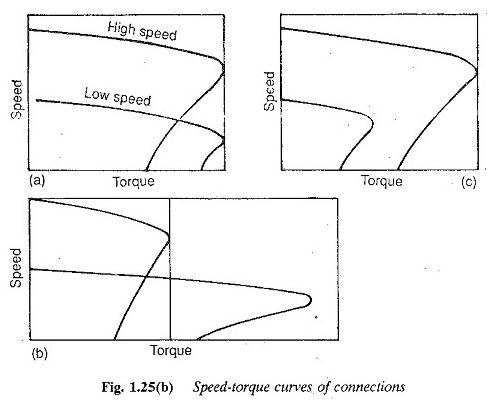
Her aşamada yarıya bölünmüş bir sargıya sahiptir. Bunlar, kutup sayısını etkili bir şekilde değiştirmek için seri veya paralel olarak bağlanır. Olası kombinasyonlar Şekil 1.25’te temsil edilmektedir.
Sabit güç çalışması, yüksek hızlar için seri-delta bağlantısı ve düşük hızlar için paralel yıldız tarafından sağlanır. Yüksek hızlarda, güç sabit olacak şekilde zayıf bir tork geliştirilir. Yarım başına voltaj yüksek hızlı bağlantıda V / 2 ve düşük hızda V / √3’tür.
Yüksek ve düşük hızlar için yüksek hızlar için paralel bağlantılar ve seriler serisi
İndüksiyon Motoru Kayma Güç Geri Kazanım:
Değişken bir rotor direnci kullanılarak hız çizgilerinin özelliğinin modifikasyonu, kötü verimliliğin ana dezavantajını sunar, bu da karlı olmaz. Rotorun aşırı ısınması nedeniyle düşük hızda çalışma mümkün değildir.
Bu düşük hızlar, kayma enerji geri kazanım modelleri kullanılarak makul verimlilikle çok etkili bir şekilde yapılabilir. Rotor devresindeki dış dirençte boşa harcanan kayma gücü, bu diyagramların sektörüne geri döner.
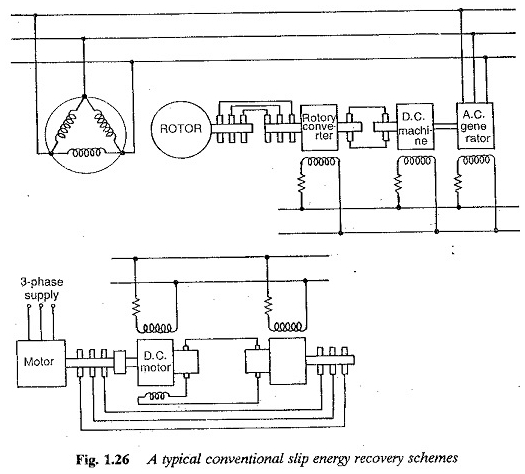
Geleneksel kayar güç geri kazanım yöntemleri, güce güç frekansına dönüştürmek için rotor devresindeki döner dönüştürücüler, alternatörler, DC makineleri vb. Gibi dönen makineler kullanır. Scherbius ve Kramer kontrolleri adı verilen bazı tipik geleneksel modeller Şekil 1.26’da temsil edilmektedir.

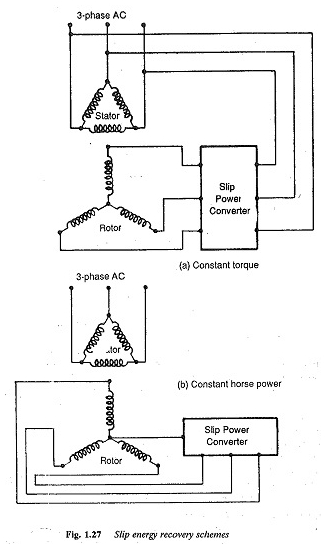
Bu yöntemler kullanıldığında, motor / no, hem sabit tork hem de sabit güç yüklerini eğitmek için çalışmalıdır. Bunlar prensip olarak Şekil 1.27 (a) ve (b) ‘de gösterilmiştir. Şekilde.
1.27 (a) Rotorun kayma frekansındaki gücü, kayar dönüştürücü vasıtasıyla çizgi frekansına dönüştürülür. Kayan güç dönüştürücü her iki yönde de güç akışına izin verirse, motor hem alt hem de süper senkron hızlarda kullanılabilir.
Bu şema sabit tork yüklerine neden olmak için kullanılır. Alt senkron operasyonda, kayan güç çizgi frekansına dönüştürülür ve sektöre verilir. Supersenkron çalışmada, hat frekansındaki güç kayar güce dönüştürülür ve motora verilir.
Bu modifikasyonun önemli bir özelliği, geliştirilen torkun, motordaki sabit bir akış hipotezi altında rotor akımı ile orantılı olmasıdır. Bu diyagram için hız tork eğrileri Şekil 1.28 (a) ‘da temsil edilmektedir.
Şekil 1.28 (a) ‘da gösterilen tork hız eğrilerinin istenen modifikasyonu, kayar güç dönüştürücüsünün motor voltajına belirli bir kaymaya karşılık gelecek şekilde kontrol edilmesiyle elde edilir. Dönüştürücü kontrolü A parametresi ile temsil edilir.
Kayan güç dönüştürücüsünün rotor tarafındaki voltajdaki artışın artması, hız düşüşüne neden olur. Mayıs ayında boş bir değere sabitlenen vakum koşulları için sabitlenen motor, düşen hız hızının bir özelliğine sahiptir.
Örneğin, A, statik kayan güç şemaları durumunda dönüştürücünün çizgi tarafında çekim açısı olabilir.
Şekil 1.27 (b) ‘deki resimli diyagram, bir yardımcı makineyi sürmek için kayan gücü kullanır. Bu durumda, kayan güç dönüştürücü indüksiyon motorunun rotoru ile birleştirilir ve gücü çeker. Burada da alt ve süper senkron hızlar mümkündür.
Alt senkron çalışmada, yardımcı makine kayma gücü mekanik güce dönüştürür. Supersenkron çalışmada, yardımcı makinenin kayar dönüştürücüsü yoluyla ek güç rotor sargıları ile beslenir. Bağlantı sabit gücü korur.
İndüksiyon motoru tork hız özellikleri Şekil 1.28 (b) ‘de temsil edilmektedir. Burada A da, belirli bir şekilde değiştiğinde yukarıda açıklandığı gibi hız kontrolüne neden olmak için seçilen kayar dönüştürücünün bir parametresidir. Kayan güç ana motor mili tarafından yönetilir. Tork, hız artışı ile azalır.
Tristör güç dönüştürücülerin mevcudiyeti ile, tork hızının karakteristiğine göre yukarıda belirtilen değişiklikleri elde etmek için indüksiyon motorları rotor devrelerinde statik dönüştürücü kaskadları (doğrultucu inverter) kullanılır. Diyagramlar Şekil 1.29 (a) ‘da temsil edilmektedir.
Kayan güç düzeltilir ve gücü sektöre doğru besleyen ortak çizgi dönüştürücüsüne verilir. Çekimin invertör açısındaki varyasyonla elde edilen hız eğrileri, Şekil 1.29’da (6) temsil edilmektedir. Rotor devresinde bir Cycloconverteur da kullanılabilir.
Rotor devresinde gerilim enjeksiyonu:
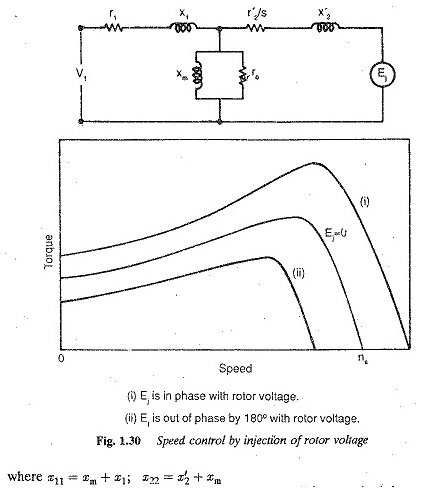
Bir indüksiyon motorunun torkunun özelliği, bir indüksiyon motorunun rotor devresine (yara rotoru) bir voltaj enjekte edilerek değiştirilebilir. Enjekte edilen gerilim kayma frekansında olmalıdır.
Enjekte edilen gerilim rotorun voltajına karşı ise, torku anında etkiler, bu da etkili rotor akımı azalır. Azaltılmış çift yükü süremez.
Rotor hızı, yeterli indüklenen rotor voltajı sağlayan bir değere ve dolayısıyla yüke neden olmak için bir rotor akımı sağlayan bir değere düşer. Öte yandan, enjekte edilen voltaj rotorun voltajına yardımcı olursa, rotor akımında bir artışa yol açar.
Geliştirilen torktaki artış, rotoru yüke neden olmak için yeterli bir rotor akımının aktığı bir hızda hızlandırır. Her iki durum için hız torku eğrileri Şekil 1.30’da temsil edilmektedir.
Karşılaştırma için, sıfır enjekte edilmiş voltajlı devrede kısa bir rotorun tork hız eğrisi de belirtilmiştir. Rakamlara göre, enjekte edilen voltajı değiştirerek motor tork kapasitesini değiştirmenin mümkün olduğu sonucuna varılabilir.
Enjekte edilen gerilim rotor akım tork kapasitesi azalırken, enjekte edilen gerilim rotor gerginliğini kolaylaştırdığında artar.
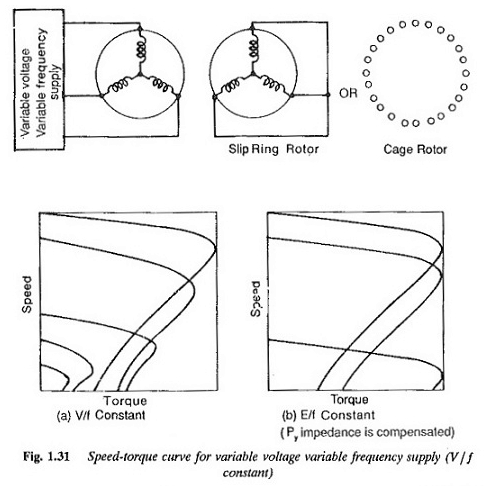
Güç frekansındaki varyasyon:
Senkron bir manyetik alanın hızı, güç frekansına bağlıdır. Sonuç olarak, güç frekansını değiştirerek, senkron hız ve dolayısıyla rotorun hızı değiştirilebilir.
Düşük frekanslı akıştaki bir artış nedeniyle doygunluktan kaçınmak için, motora uygulanan voltaj da değişir, böylece akış tüm frekanslarda nominal değerinde sabit kalır.
Bunu başarmak için basit bir yöntem, v / f’nin sabit olması için hem gerginliği hem de frekansı değiştirmektir. V / F sabitine sahip tork hız eğrileri Şekil 1.31’de temsil edilmektedir.
Düşük frekanslı bir tork tükenmesi vardır. Motor tork kapasitesini ve aşırı yük kapasitesini azalttı. Bu, statorun düşük frekanslara direncinin baskın etkisinden kaynaklanmaktadır.


Dirençteki düşüş, uygulanan voltaja kıyasla kayda değer hale gelir. Bu, tutarlılığı düşük frekansta korunamayan akış tükenmesine neden olur. V / F sabiti ile geliştirilen çift
Tüm frekanslarda aynı çift ve aynı aşırı yük kapasitesine sahip olmak için, E / F’yi sabit tutmak için statorun (direnç) düşmesini telafi etmek gerekir. V / F artık sabit değildir, çünkü frekans azaldıkça artar. Bu durumda geliştirilen çift,

Veya
L ′ 2σ, rotor sızıntılarının endüktansıdır.
E / F sabiti için tork hız eğrileri Şekil 1.31 (b) ‘de temsil edilmektedir.
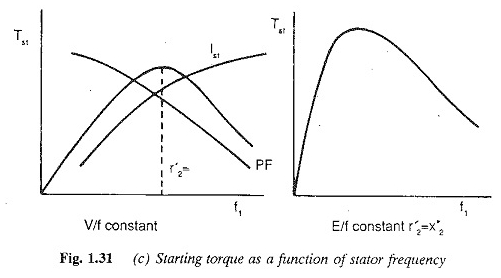
V / F (sabit) kontrol ile, başlangıç torku frekansta bir azalma ile belirli bir değere kadar artar. Bu frekans değerinin altında, başlangıç torku azalır. Bu etkinin, rotor sızıntılarının reaktansını değiştirerek gerçekleştirilene benzer olduğu düşünülmektedir.
Frekans azaldıkça, rotorun reaktansı sızar. Frekans azaldıkça, rotor sızıntılarının reaktansı azalır. Gerçekten de, rotordaki bir artış, sızıntıların reaktanına kıyasla direnç gerçekleşir.
Sonuç olarak, başlangıç torku, rotor sızıntılarının reaktanının rotora karşı dirençle eşit olduğu belirli bir frekansa kadar artar.
Frekans azalırsa, başlangıç torku azalır. Başlangıç torkunun frekansla değişimi Şekil 1.31 (c) ‘de gösterilmiştir. Bununla birlikte, sabit E / F kontrolü ile, frekans parametreler tarafından karar verilen bir değere düştükçe başlangıç torku artar.
Frekans hala azalırsa, başlangıç torku azalır. Hızlanma, E / F sabit tutarak statorun frekansını düşük bir değerden değiştirerek sabit bir tork ve bir takviye akımından elde edilebilir.
İndüksiyon motoru tork hız özellikleri, besleme frekansının nominal değerin ötesinde artırılmasıyla elde edilir. Motor akışı azalır, çünkü voltaj nominal değerin ötesinde artamaz. Motor akışın akışında çalışır.
Tork hız eğrileri tüm frekanslarda birbirine paraleldir, ikinci kadrana uzanırlar, bu da rejenerasyonun mümkün olduğunu gösterir.
Motorun çalıştırılması, değişken bir voltaj, değişken frekans güç kaynağı kullanılarak kolayca gerçekleştirilebilir. Bu, başlangıç akımını azaltır ve düşük dirençli kafes motorlarla bile iyi bir güç faktörüne makul bir şekilde hızlandırır.
İndüksiyon Motoru Hız Kontrolü:
Üç faz indüksiyonlu bir motor aslında sabit bir hızlı motordur. Geleneksel üç faz sabit voltajından, sabit frekans beslemesinden sağlandığında, motorun pürüzsüz bir hız kontrolünü geniş bir aralıkta elde etmek mümkün değildir.
Tiristör güç dönüştürücüler değişken frekans ve değişken voltaj malzemelerini mümkün kılmıştır. Bunlar, geniş bir aralıkta indüksiyon motorlarının düzgün bir hız kontrolünü elde etmek için kullanılır.
Tartışılan indüksiyon motorunun torkunun hızının özelliklerini değiştirme yöntemleri, aşağı yukarı kontrol yöntemleridir. Tiristör güç dönüştürücüler, hız kontrol yöntemlerini benimsemek için yaygın olarak kullanılır, örneğin
Rotor direncini kontrol etmek için bir kıyıcı, AC voltaj kontrolörü besleme voltajını, kayar enerji geri kazanımı için statik dönüştürücü kaskadlarını değiştirecek şekilde, vb.