İndüksiyon Motoru prensibi | Tork Sürgülü Karakterist:
İndüksiyon motoru prensibi şimdiye kadar tanıtılmamıştır. Üç faz için stator ve rotor yarası ile silindirik bir rotor makinesini ve Şekil 5.40’ta gösterildiği gibi aynı kutup sayısını düşünün.
Başlangıçta rotorun rotorunun açık devrede olduğunu ve statorun sonsuz bir veri yoluna (v, f) bağlı olduğunu varsayalım.
Stator akımları, statorun voltajını ve sızıntıların reaktanının ihmal edilebilir olduğunu varsayarak terminalin voltajını dengeleyen bir EMF’yi indükleyen eşzamanlı bir hızda çalışan bir döner manyetik alan kurdu.
Rotary alanı ayrıca rotor sargısında EMF’yi indükler, ancak rotor açık devrede olduğu için rotor akımı dolaşmaz. Rotor EMF’lerinin sıklığı elbette f’dir. Rotor MMF F2 = 0 olduğundan, çift gelişmez ve rotor sabit olmaya devam eder.
İndüksiyon motoru prensibi, stator (birincil) ve rotorun (ikincil), sıradan bir transformatörde olduğu gibi zaman içinde değişen bir akıştan ziyade döner manyetik akıştan kaynaklanan aynı frekansa sahip EMF’lere sahip olduğu bir transformatör olarak hareket eder.
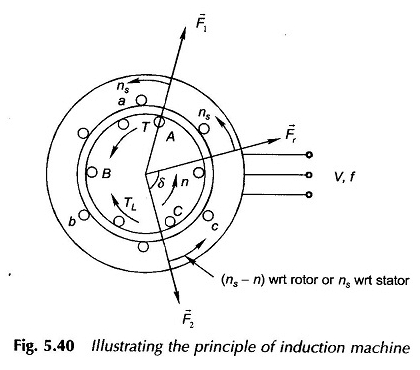 Rotorun şimdi sabit tutulması (dönüşten bloke edilir) ve rotorun sarılması kısa devre. Rotor şimdi mevcut akımları taşıyor ve MMF F2’yi aynı yönde ve stator alanıyla aynı hızda çeviriyor. F2, statordaki reaksiyon akımlarını veri yolu çubuğundan (tıpkı sıradan bir transformatörde olduğu gibi) dolaşır, böylece sonuçta ortaya çıkan akış yoğunluğunun akış / kutupu φr (senkron hızda hava yürüyüşünde dönme), bir EMF statorunu terminalin voltajını dengelemek için indükler. Açıkçası, rotor rotor açık devrede olduğu zamanla aynı olmalıdır. Aslında, φR, motor üzerindeki yük tarafından oluşturulan çalışma koşullarından bağımsız olarak sabit kalacaktır. Birbirinin sabit olan φR ve F2 etkileşimi, rotoru FR yönünde veya stator F1 alanında hareket ettirme eğiliminde olan çifti oluşturur. Bu nedenle indüksiyon motoru, senkron motordan farklı olarak kendi kendine başlayan bir cihazdır.
Rotorun şimdi sabit tutulması (dönüşten bloke edilir) ve rotorun sarılması kısa devre. Rotor şimdi mevcut akımları taşıyor ve MMF F2’yi aynı yönde ve stator alanıyla aynı hızda çeviriyor. F2, statordaki reaksiyon akımlarını veri yolu çubuğundan (tıpkı sıradan bir transformatörde olduğu gibi) dolaşır, böylece sonuçta ortaya çıkan akış yoğunluğunun akış / kutupu φr (senkron hızda hava yürüyüşünde dönme), bir EMF statorunu terminalin voltajını dengelemek için indükler. Açıkçası, rotor rotor açık devrede olduğu zamanla aynı olmalıdır. Aslında, φR, motor üzerindeki yük tarafından oluşturulan çalışma koşullarından bağımsız olarak sabit kalacaktır. Birbirinin sabit olan φR ve F2 etkileşimi, rotoru FR yönünde veya stator F1 alanında hareket ettirme eğiliminde olan çifti oluşturur. Bu nedenle indüksiyon motoru, senkron motordan farklı olarak kendi kendine başlayan bir cihazdır.
Rotor kısa devresinin şimdi dönmesine izin ver. Stator alanına doğru çalışır ve sabit bir n hız kazanır. Açıkçası, n 
Rotorun stator alanının arkasına kaydırdığı slayt s birim hızı (senkron hıza kıyasla). Rotor f2 = sf frekansına kayma frekansı denir. Denklemin. (5.66), rotorun hızı
![]()
Rotor sargısındaki taslak frekans akımları, rotorun rotorla aynı yönde statorun alanı ile aynı yönde bir rotor alanına neden olur

Rotor, aynı yöndeki rotora kıyasla (ns – n) bir hızda ve rotor alanında çalıştığından, statordan görülen rotor alanının net hızı (yere referans)
![]()
Yani, statorun alanı ile aynı. Böylece, rotorun F2 reaksiyon alanı, stator F1 veya ortaya çıkan FR alanının (kutupla φR akışı ile) alanına kıyasla her zaman sabittir. Rotor MMF F2, rotor I2’nin akımı ile orantılı olduğundan ve sonuçta ortaya çıkan akış / kutupun çalışma koşullarından bağımsız olarak terminal voltajı tarafından sabitlendiğinden, indüksiyon motorunun torku (bkz. Eq. (5.58)))))))))))
![]()
Burada torkun indüksiyon motoru tarafından senkron dışındaki herhangi bir mekanik hızda üretildiğini gözlemliyoruz; Böyle bir çift asenkron çift olarak adlandırılır.
F2’nin FR’ye geç kaldığı δ açısı, ortaya çıkan MMF’nin bilinmesi gerekir. Δ belirlemeye başlamadan önce, rotor sargısının kısa devresinin, ayrı ayrı sarılmanın tüm sürücülerini kısa devre ile eşdeğer olduğuna dikkat edilmelidir.
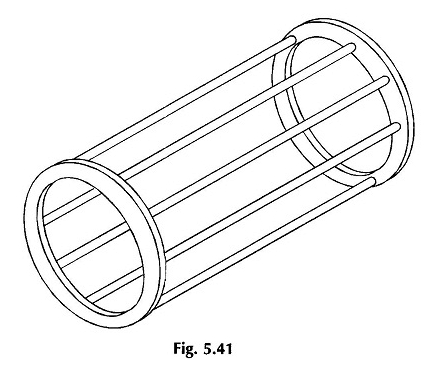
Sonuç olarak, rotor mutlaka düzgün bir şekilde yuvarlanmamalıdır; Rotorun her iki tarafında uç halkalar yaparak rotora yerleştirilmiş çubuklar ve kısa devre yuvaları yapmak için inşa edilebilir.
Böyle bir rotor, sincap kafesinin rotoru olarak adlandırılır; İletken kafes, Şekil 5.41’de ayrı ayrı gösterilmiştir. Sincap kafesinin rotoru ucuz ve sağlam bir yapıya sahiptir ve indüksiyon motoru uygulamalarının büyük bir çoğunluğunda benimsenmiştir.
Düzgün haddelenmiş bir rotorlu indüksiyon motoru prensibine, yara rotor indüksiyon motoru denir ve ortadan kaldırılmadan önce rotor sargısına harici bir direnç eklemesi için kurulum sağlayan üç kayar halkayla birlikte verilir. Bu motorlar sorumlu yükleme durumlarında kullanılır.
Normalde, sincapın bir indüksiyon motorunun tam yük kayması%3 ila 10 küçüktür. Sonuç olarak, rotorun empedansı esas olarak dirençlidir, rotor uyumlarının f2 = sf ile orantılı olması reaktansı ihmal edilebilir. Ek olarak, EMF rotor tarafından indükler rotorun kayması ile orantılıdır, çünkü φR sabitlenir ve rotora kıyasla hız ns – n = sns döner.
Sonuç olarak, rotor akımı neredeyse rotor EMF ile uyumludur ve rotorun kayması ile orantılıdır. Bu sonuç, bireysel rotor sürücüleri için de geçerli olacaktır.
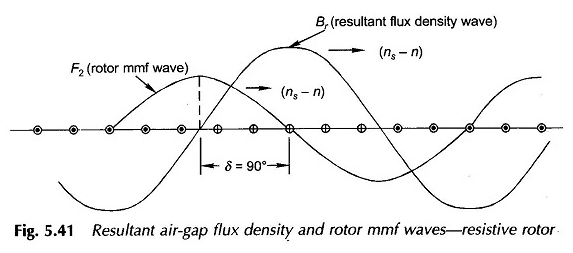
Şekil 5.42, gelişmiş bir diyagramda hız (NS – N) = SNS önündeki rotor sürücülerinin önünde yerleşik dirençli fırçalama akış yoğunluk dalgasını göstermektedir.
Kısa devre geçirilen rotor sürücülerinde indüklenen akımlar, BR ile senkronizmedeki rotora kıyasla hızda (NS-N) sinüzoidal dağıtım hareketleri dağıtılır. Dahası, rotor sürücülerinin özetlenmesi gerektiği için, yani
İçlerindeki akımlar kendi EMF’leriyle uyumludur, rotor akımının dağılımı BR dalgası ile uzay aşamasındadır. Sinüzoidal rotor akımının dağılımı, rotor akımının dağılımının 90 ° arkasında veya brüt dalganın 90 ° arkasında olan bir rotor sinüzoidal F2 rotor dalgası üretir.
Bu nedenle, küçük kayar değerler için indüksiyon motorundaki δ açısının 90 ° olduğu sonucuna varılmıştır. Bu yüzden,

EMF rotoru kayma ile doğrusal olarak orantılı olduğundan, rotorun akımı da esas olarak küçük kayar değerlere karşı bir rotor dirençlidir. Sonuç olarak, indüksiyon motorunda geliştirilen tork, küçük bir kayan değer için kaymanın giderek daha doğrusal bir fonksiyonudur, S = 0 için sıfırdır, yani eşzamanlı bir hızda.
Vardiya daha da arttıkça, rotor sızıntılarının reaktansı artık göz ardı edilemez. Kayma değeri Sx2’dir, burada X2, rotor sızıntılarının F frekansında faz ile reaktansıdır, yani rotor bir ayakta dururken. Rotor akımı artık EMF indüklediğinin arkasında gecikiyor

burada R2, faz başına rotora karşı dirençtir.
Rotor sürücülerindeki akımlar, θ açısının neden olduğu EMF’yi sürüklediğinden, sürücünün rotor akımının dağılımı ve bu nedenle rotor MMF F2, Şekil 5.40’da sola bir açı ile hareket eder, böylece
![]()
Bu sin Δ <1 anlamına gelir. Ek olarak, rotor empedansı S ile arttığından, rotorun akımı kayma ile orantılı olmaktan uzaktır. Bu iki faktör, motor torkunun maksimum değere geçmesine neden olur, daha sonra S sürekli olarak arttıkça kademeli olarak azalmaya başlar.
İndüksiyon motorundaki tork kaymasının tam özelliğinin doğası Şekil 5.43’te sunulmaktadır. Maksimum tork rüptür torku olarak bilinir. Motor, kısa bir sürenin ötesinde yüklenirse, arızanın değerinden daha büyük bir tork yükü ile dinlenirdi.
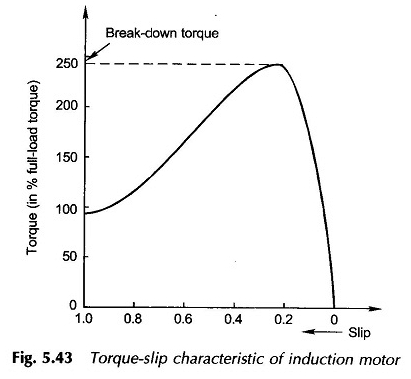
Daha önce de belirtildiği gibi, bir indüksiyon motorunun kayması tam yükte% 3 ila 10’dur. Sonuç olarak, yükten bağımsız olarak sabit bir hızda çalışan senkron motorun aksine, sabit bir hız sürüşüdür.
Bir indüksiyon motoru prensibi negatif bir vardiyada veya bir hızda, yani senkronizin üzerinde bir hızda yürütülürse, eylemin sonuçlarının oluşturulması.