İndüksiyon motor sürücüsünün değişken frekans kontrolü:
İndüksiyon motoru sürücüsünün değişken frekans kontrolü – senkron hız, bu nedenle motor hızı değişken bir güç frekansı ile kontrol edilebilir. Statorda indüklenen voltaj, besleme frekansı ve hava boşluğu akışının ürünü ile orantılıdır.
Statorun düşüşü ihmal edilirse, terminalin voltajı frekans ve akışın ürünü ile orantılı olarak kabul edilebilir.
Terminal voltajında değişiklik yapılmadan besleme frekansındaki herhangi bir azalma, hava boşluğu akışında bir artışa neden olur. İndüksiyon motorları, manyetik malzemeyi tam olarak kullanmak için mıknatıslanmanın karakteristik diz noktasında çalışacak şekilde tasarlanmıştır.
Bu nedenle, akıştaki artış motoru doyuracaktır. Bu, mıknatıslama akımını artıracak, çizginin akımını ve gerginliğini deforme edecek, çekirdek kaybını ve statorun bakır kaybını artıracak ve yüksek şömine akustik bir gürültü üretecektir.
Değerlendirilen değerin ötesinde bir akış artışı doygunluk etkilerinin göz önüne alındığında istenmeyen bir artış olsa da, motor tork kapasitesini korumak için akışta bir azalma da önlenir.
Sonuç olarak, nominal frekansın altındaki indüksiyon motoru tahrikinin değişken frekansının kontrolü, nominal hava boşluğu akışında, oran sabitini (v / f) nominal değere korumak için frekansla değişken bir terminal voltajı ile gerçekleştirilir. Denklemin. (6.13)
Burada k bir sabittir ve sırasıyla LS ve L ′, stator ve stator rotorun endüktanslarını ifade eder. Olumlu işaret, otomobilin işleyişi ve negatif işaret frenleme işlemi içindir.
Frekans düşük olmadığında, (RS / F) ≪ 2π (LS + L ′ R) ve bu nedenle (6.69)

Denklem (6.70), sabit bir oran (V / F) ile motorun düşük hız (veya frekanslar) dışında sabit bir maksimum tork geliştirdiğini göstermektedir. Bu nedenle motor sabit tork modunda çalışır. Denk.
(6.69), statorun direnç düşüşü nedeniyle düşük frekanslar (veya düşük hızlar) için [yani (RS / F) 2π (LS + L ′ R) ile karşılaştırıldığında ihmal edilemez olduğunda] maksimum tork, motor işleyişinde (işaret -eve) daha düşük bir değere ve frip (işaret -ve) işlevinde daha fazla değere sahip olacaktır.
Bu davranış, otomobilin çalışması sırasında akışın azaltılması ve frenlemenin işleyişi sırasında akıştaki artıştan kaynaklanmaktadır. Aynı maksimum torkun otomobilin çalışmasında da düşük hızda tutulması gerektiğinde, düşük frekansta oranı (v / f) arttırılır.
Bu, maksimum fren torkunda ek bir artışa ve frenlemenin işleyişinde makinenin önemli ölçüde doygunluğuna neden olur.
Temel hızda nominal değere sahip olduğunuzda veya ulaştığınızda, frekansla artırılamaz. Bu nedenle, temel hızın üstünde, frekans Denk. (6.70), V sabit tutulurken, frekanstaki (veya hız) artışla maksimum tork azalır.
Terminal voltajının frekansla değişimi bu nedenle Şekil 6.33 (a) ‘da gösterildiği gibidir. V, temel hızın üzerinde sabit tutulur. Maksimum sabit torkun korunması için oranın (v / f) arttığı düşük frekans hariç, temel hız oranı (v / f) sabit tutulur.
Karşılık gelen tork eğrileri, hem manşon hem de fren işlemleri için Şekil 6.33 (b) ‘de temsil edilmektedir. Eğriler, hız kontrolü ve frenleme operasyonunun senkron hız hızında bir hızda mevcut olduğunu göstermektedir.

Herhangi bir frekanstaki işlem, hem otomatik işlemler hem de frenleme için senkron hız ile maksimum tork noktası arasında sınırlı olduğunda, belirli bir tork daha düşük bir akım ile elde edilir.
Sonuç olarak, motorun her frekans için çalışması, Şekil 6.33 (b) ‘nin tam çizgisinde gösterildiği gibi senkron hız ile maksimum tork noktası arasında sınırlıdır.
İndüksiyon motor sürücüsünün değişken frekans kontrolü, aşağıdaki özellikler nedeniyle iyi çalışma performansı ve geçici sunar:
- Hız kontrolü ve frenleme işlemi sıfır hızdan üst temel hıza ulaşılabilir.
- Geçişler sırasında (başlatma, frenleme ve hız tersine çevirme), işlem, azaltılmış bir akım ile maksimum torkla gerçekleştirilebilir, bu da iyi bir dinamik cevap verir.
- Bakır kayıpları düşüktür ve verimlilik ve güç faktörü yüksektir, çünkü operasyon senkron hız ile tüm frekanslarda maksimum tork noktası arasında sınırlıdır.
- Tam yük eksikliği hızındaki düşüş küçüktür.
İndüksiyon motorunun değişken frekans kontrol kontrolünün en önemli avantajı, iyi bir çalışma fonksiyonu ve bir sincap kafesi indüksiyon motorundan yukarıdaki geçiş performansı olan değişken bir sürücüye izin vermesidir.
Sincap kafes motorunun bir DC motoruna kıyasla bir takım avantajları vardır. Ucuz, sağlam, güvenilir ve daha dayanıklıdır.
Bir anahtar ve fırçaların olmaması nedeniyle, neredeyse hiç bakım gerektirmez, patlayıcı ve kontamine bir ortamda kullanılabilir ve daha yüksek hızlar, gerilimler ve enerji boyutları için tasarlanabilir. Ayrıca daha düşük atalet, hacim ve ağırlığa sahiptir.
Bir sincap kafes motorunun maliyeti, aynı notanın sürekli bir akım motoruna kıyasla çok daha düşük olsa da, genel olarak motor indüksiyon motoru eğitiminin toplam maliyeti daha yüksektir.
Ancak yukarıda listelenen avantajlar nedeniyle, değişken frekans indüksiyon motoru okuyucuları çoğu uygulama için CC motor disklerine tercih edilir.
Madenlerde ve kimyasal endüstride olduğu gibi, yeraltı ve sualtı tesisleri gibi bakım gerektirmeyen çalışmayı gerektiren özel uygulamalarda ve patlayıcı ve kontamine ortamları içeren uygulamalarda, değişken frekans indüksiyonu olan motor okuyucular doğal bir seçimdir.
Çekiş, değirmen masaları, çelik işleri, pompalar, fan, üfleyiciler, kompresörler, spitter, taşıyıcılar, takım tezgahları vb.
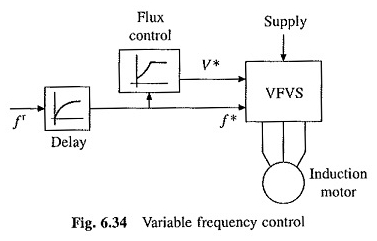
İndüksiyon motoru sürüş şemasının değişken frekans kontrolünün blok diyagramı Şekil 6.34’te gösterilmiştir. Motor değişken bir voltaj kaynağından (VFV) sağlanır. V * ve f *, VFV’ler için voltaj ve frekans kontrolleridir.
Akış kontrol bloğu, Şekil 6.33 (a) ‘nın V * ve F * arasındaki ilişkisini korumak için VFV’ler için bir voltaj komutu üretir. F * referans frekansı kontrol hızında değiştirilir.
F * ve Fr arasında bir gecikme devresi eklenir, böylece FT büyük bir miktarla değiştirildiğinde bile, F * sadece motor hızının FT değişikliklerini takip edebilmesi için yavaşça değişir, böylece eşzamanlı hız ve maksimum tork noktası arasındaki her frekans için motor işlemini kısıtlar. VFV’ler bir gerginlik kaynağı invertör veya bir cycloconverteur olabilir.
Hız Hız Kontrolü:
V ve F, makinenin nominal voltajı ve frekansı olsun. Motor, sabit bir kontrol (v / f) ile temel hızın altında kullanıldığında, bir frekans için, KF, terminal voltajı KV olacaktır, burada K 0 ≤ k ≤ 1 gibi bir faktördür. Bu nedenle, frekans 0’dan f, k geçişine 0’dan 1’e geçer.
KV gerginliğini ve KF frekansını değiştirerek ve statorun direnç düşüşünü ihmal etmek, denklemler (6.4) ve (6.10)
Denklemlerde. (6.71) ve (6.72) (KS) K değiştiği için sabit tutulursa, rotor Ir ve çift t sabit kalacaktır. Vardiya küçük olduğundan, R voltajla uyumlu olacaktır. Akış sabit olduğu için IM de sabit olacaktır. ŞİMDİ
![]()
Böylece, motorun çalışması frekans değiştikçe sabit bir KS değerinde gerçekleştirilirse, motor sabit bir akım ve bir tork üzerinde çalışacaktır. KS’nin anlamını inceleyelim.
KF frekansında
Not ωst, döner alan hızı kΩms ve rotor ωm hızındaki fark olan kayma hızıdır. Ayrıca, makine yüklendiğinde yüksüz yükünün motor hızındaki düşüştür.
Yukarıdaki tartışma gösterilmektedir. Herhangi bir t değeri için, yük hızından (kΩMs) motor hızındaki düşüşün tüm frekanslar için aynıdır. Bu nedenle, 0 için makine hız torkunun özellikleri
Makinenin sabit bir kayma hızında işleyişi, aşağıda belirtildiği gibi sabit bir rotor frekansında çalışmayı da içerir.

burada fr ve ωr sırasıyla hz ve rad / sn’deki rotorun frekansıdır.
S> (XS + X′R) için, bu nedenle denklemlerden. (6.72) ve (6.73)

EQN. (6.76) S için
Yukarıdaki tartışmaya bağlı olarak, kayan bir hız için, motor akımı ve tork tüm frekanslarda aynı değerlere sahiptir. Böylece, motor akımı ve tork, kayma hızını kontrol ederek kontrol edilebilir.
Ek olarak, motor akımı, kayma hızını sınırlandırarak bir güvenlik sınırı içinde sınırlandırılabilir. Bu davranış, akımı yetkili bir sınır içindeki akımı sınırlamak için kapalı bir döngü hız kontrolünde kullanılır.
O zaman operasyonu temel hızın üzerindeki düşünelim. Daha önce belirtildiği gibi, makine sabit bir voltaj V’de çalışır. Şimdi

Frekans k> 1 notundan daha büyük olduğundan, işlem tekrar senkron hız ve maksimum tork arasında sınırlı olduğundan, kaymanın küçük bir değeri vardır, bu nedenle

Böylece, temel hızın üzerindeki hızlar için, verilen bir ve dolayısıyla yaklaşık olarak bir bağış için, kayan hız ωSL, K (veya frekans) ile doğrusal olarak artar. Bu davranış, temel hızın üzerindeki yetkili değerdeki akımı sınırlamak için kapalı bir döngü hız kontrolünde kullanılır.
Vardiya küçük olduğu için R, V ile uyumludur. Makinenin makine kaybı ihmal edilirse, geliştirilen güç tarafından verilir
![]()
Bu nedenle, PM veriler için sabittir ve bu nedenle AS için. Bu nedenle okuyucu sabit güç modunda çalışır.
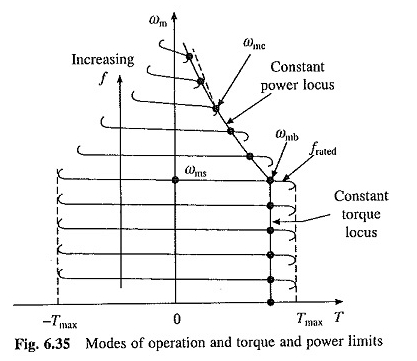
Tork ve güç sınırlamaları ve çalışma modları:
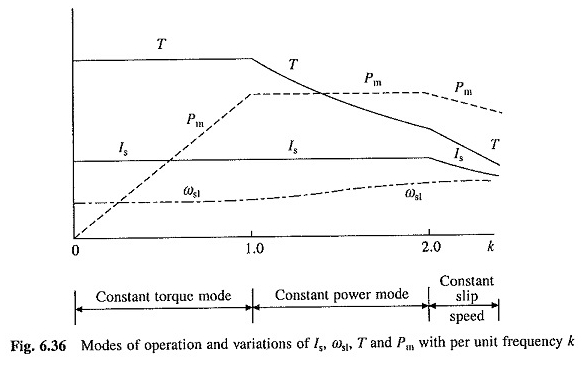
Belirli bir stator akımı ve nominal frekansın altındaki ve üzerindeki frekanslar için tork ve güçteki varyasyonlar, Şekil 6.35’teki noktalarla temsil edilmektedir.
Stator akımı maksimum yetkili değere sahip olduğunda, bunlar indüksiyon motor sürücüsünün değişken frekans kontrolündeki maksimum tork ve motor besleme kapasitelerini temsil edecektir.
Frekanslı maksimum tork ve güç kapasitelerindeki varyasyon Şekil 6.36’da temsil edilmektedir. Frekansla kayma hızındaki ωsl’deki varyasyon da bu şekilde temsil edilir.
Şekil 6.35 ve 6.36’da gösterildiği gibi, motor sıfırdan temel hıza kadar sabit bir maksimum torka sahiptir, böylece okuyucu sabit tork modunda çalışır. Bu frekans aralığında V, Şekil 2’de gösterildiği gibi frekansla modifiye edilir.
6.33 (a) ve maksimum yetkili akımın hızı sabit kalır. Temel hızdan hıza ωMC’ye kadar, maksimum güç sabit bir değere sahiptir, böylece motor sabit güç modunda çalışır. Hız ωMC’de (Şekil 6.35) arıza torkuna ulaşılır.
Motoru bu hızın ötesinde maksimum yetkili akımda çalıştırma girişimi motoru tutacaktır. Sonuç olarak, ΩMC hızının ötesinde, makine sabit bir kayma hızında çalışır ve maksimum yetkili akım ve maksimum güç azalabilir (Şekil 6.36).
Şimdi, motor akımı hızla ters düşer ve hız kare olduğu için tork ters düşer. Bu bölgedeki operasyon, geniş bir hız aralığı gerektiren, ancak yüksek hızlarda düşük bir tork gerektiren disklerde gereklidir.
Örneğin, çekiş uygulamalarında, okuyucu bu bölgede tam hızda çalıştığında çalışır, çünkü yüksek hızlı dengede gereken tork, hızlanma sırasındaki değerine kıyasla çok düşüktür.