İndüksiyon Motor Sürücüsünün Frenlenmesi:
İndüksiyon motor sürücüsünün frenlenmesi için aşağıdaki yöntemler kullanılır:
- Rejeneratif frenleme
- Fiş veya ters voltaj dalı
Dinamik (veya reostatik) frenleme:
- Dinamik Fren AC
- Kapasitörler kullanarak kendini heyecanlandıran frenleme
- Dinamik Fren DC
- Sıfır dizi frenleme
Rejeneratif Frenleme:
Bir indüksiyon motorunun tedarik girişi tarafından verilir
![]()
burada φs, stator V faz voltajı ile stator fazı akımı arasındaki faz açısıdır. Otomobil φs <90 ° 'nin çalışması için. Rotorun hızı senkron hızdan daha büyük hale gelirse, rotor sürücüleri ve döner hava-rotasyon alanı arasındaki göreceli hız tersine çevrilir.
Bu, rotorun, rotorun akımını ve rotorun rotorunun dönüşlerini dengeleyen stator akımının bileşenini uyarır. Sonuç olarak, φs açısı 90 ° ‘den büyük hale gelir ve güç akışı tersine çevrilir ve rejeneratif frenleme verir.
Bir hava boşluğu akışı üretmek için gereken mıknatıslama akımı kaynaktan elde edilir. Değişimin negatif olması dışında (6.1) – (6.13) denklemleri geçerlidir. Thetie’nin hızının özelliğinin doğası Şekil 6.13’te temsil edilmektedir.
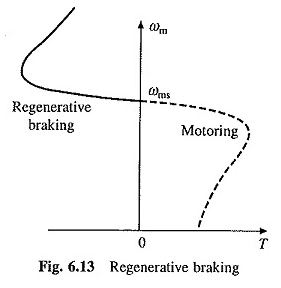
Sabit bir frekans kaynağı ile beslendiğinde, rejeneratif frenleme sadece senkron hızdan daha üstün hızlar için mümkündür. Değişken bir frekans kaynağı ile, senkron hızdan daha düşük hızlar için de elde edilebilir.
Motor hızını aktif bir yüke karşı korumak için rejeneratif fren kullanıldığında, frenleme torkunun maksimum olduğu senkron hız ve hız arasında kararlı çalışma genellikle mümkündür.
Rejeneratif frenlemenin ana avantajı, üretilen gücün faydalı bir şekilde kullanılması ve ana dezavantajların, sabit bir frekans kaynağından sağlandıklarında, senkron hızda kullanılamamasıdır.
Rejenere gücün kullanımı (veya emilimi), daha önce doğrudan akım motorlarının rejeneratif frenlenmesi için açıklananlarla aynı şekilde gerçekleşir.
Fiş veya ters gerginlik dalı:
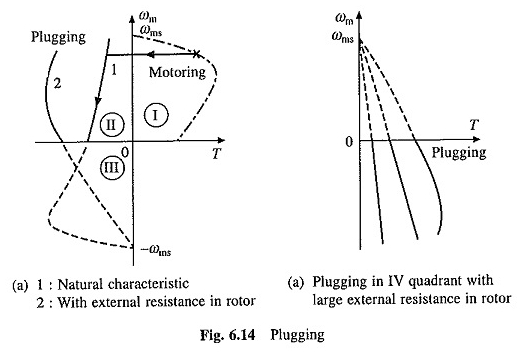
Bir hızda çalışan motor beslemesinin faz sırası tersine çevrildiğinde, statorun iki aşamasının güç terminallerine kıyasla bağlantıları değişmesi ile, işlem otomobilden Şekil 6.14’te gösterildiği gibi fişe geçer.
Bağlantı özellikleri aslında çeyrek III ila II’nin negatif faz dizisi için otomotiv özelliklerinin bir uzantısıdır. Karşı evrenin dizisinin ters çevrilmesi döner alanın yönünü. Fişin kayması SN ile gösterilirse

Motor performansı denklemlerden hesaplanabilir. (6.4) – (6.10) S, Sn veya (2 – s) ile değiştirildiğinde. Tapalardaki anahtarlama sırasında, kaymanın 2’ye kadar olabileceği göz önüne alındığında, rotorun neden olduğu voltaj sıfır hızda değerinden iki kez olabilir.
Bu nedenle, fren torku düşük olmasına rağmen motor akımı önemlidir. Rotor yara motorları durumunda, iki kez eşit bir direnç, marş alımına karşı direnç, fren akımını başlangıç değerine sınırlamak için rotora sokulur. Bu aynı zamanda eğri 2’de gösterildiği gibi fren torkunu da arttırır (Şekil 6.14).
Şekil 6.14’te gösterildiği gibi, çift sıfır hız değildir. Motoru durdurmak için kullanıldığında, motorun güç kaynağından bir hıza veya sıfıra yakın bağlantısı kesilmesi gerekir.
Bu, sıfır hızı ve güç motorunun bağlantısını tespit etmek için ek bir cihaz kullanmayı gerekli kılar. Bu indüksiyon motoru sürüş frenleme, motoru tersine çevirmek için uygundur.
Motor zaten operasyon için zıt yönde bağlandığından ve torkun sıfır veya başka bir hızda olmadığı için, motor nazikçe yavaşlar, sonra ters yönde hızlanır.
Pozitif sekans gerginliklerine bağlı bir indüksiyon motoru, ters yönde (Quadrant IV) aktif bir yük tarafından yönlendirildiğinde özel bir tıkanma durumu oluşur. Vinç bu uygulamalardan biridir.
Rotora karşı büyük bir direnç, özelliklerin negatif bir eğime sahip olacak şekilde kullanılır ve bu nedenle okuyucunun denge durumunda kararlı olması (Şekil 6.14 (b)).
Bu yöntemde, rotora aktif yükle veya motorun ataleti ve yükte depolanan kinetik enerji ile sağlanan mekanik enerji, bir rotor direncinde elektrik ve atıkla beslenen enerjiye dönüştürülür. Kaynaktan ek enerji alınır ve bir rotor direncinde boşa harcanır.
Senkron hızdan yük altında frenlendiğinde, rotor direncinde dağılan toplam enerji miktarı, (3/2) JΩ2ms (Eq. (6.63) tarafından verilir, bu da atalette depolanan enerjinin üç katıdır. Bu nedenle, JΩ2ms’ye eşit ek bir enerji kaynaktan alınır.