İndüksiyon Motoru Vektör Kontrolü:
İndüksiyon motorunun vektör kontrolünün arkasındaki tek fikir, CC motorunun sektörde ayrı ayrı kullanıldığı daha yüksek performans sunması gereken bir elektrikli okuyucuya sahip olmaktır.
Buna ek olarak, böyle bir okuyucu, CC oynatıcısının bakımı ve daha ucuz olmadan sağlam, güvenilir bir alternatif olarak ortaya çıkmalıdır. Birkaç yıl önce, DC motoru ayrı ayrı heyecanlı bir şekilde sektörde ana bir işgücü olarak kabul edildi.
Bunun nedeni, indüksiyon motoruna kıyasla daha hızlı dinamik performansından kaynaklanmaktadır. CC motorunun daha hızlı dinamik tepkisi, iki kat beslenmiş motorunda, motordaki bir tork ve akış kontrolünün doğasında bulunan bir kurulumla yatmaktadır.
İndüksiyon motorunun vektör kontrolünün piyasaya sürülmesinden önce, kafes indüksiyon motorunun sürüşünde geniş kabul edilebilirliğe sahip yöntemlere voltaj kontrolü, frekans kontrolü, rotor direnç kontrolü, v / f kontrolü, akış kontrolü, kayma gücünün kayma kontrolü, geri kazanım kontrolü denir.
Tüm bu kontrol yöntemleri, bir indüksiyon motorunun skaler kontrolü olarak nitelendirilir ve bunlarla, kafes motoru ayrı ayrı uyarılmış motora kıyasla daha düşük dinamik performansa sahiptir.
Araştırmacı, bakımsız, sağlam ve yüksek performanslı bir AC okuyucuya sahip olma çabalarında, bir kafes rotoru olan bir indüksiyon motoru ile performans elde etmek ve CC motor özelliklerini ayrı ayrı geliştirmek istedi.
Bu anlamda Blaschke, indüksiyon motorunun vektör kontrolü kavramını tanıttı. Blaschke, 1972’de, bir indüksiyon motor sürücüsünde DC motorunun özelliklerini gerçekleştirmek için zemine yönelim prensibini tanıttı.
Aynı şey için, torkun ayrıştırılmış kontrolünü ve motordaki akışı kullandı ve ismini transvektörün kontrolü olarak verdi.
Kontrol veya alan odaklı kontrollü kafes indüksiyon motoru okuyucu, yüksek düzeyde dinamik performans ve bu okuyucu ile ilişkili kapalı döngü kontrolü sunar.
Skaler ve vektör kontrolleri arasında büyük bir fark olmamasına rağmen, ikincisi, yüksek dinamik performansa sahip bir kontrol sistemi olarak uygun hale getiren belirli özelliklere sahiptir.
Vektör kontrolüne, tork ve akış akım vektörlerinin kontrol edildiği bağımsız veya ayrıştırılmış kontrol olarak da adlandırılır.
Vektör kontrol modunda, kafes motor okuyucusunun doğrusallaştırıldığı ve takviye akımının kontrolünün okuyucu tarafından geliştirilen elektromanyetik torku doğrudan etkilediği tamamen telafi edilmiş bir sürekli akım motoru olarak davrandığı iyi kurulmuş bir gerçektir.
Benzer şekilde, kafes motorunda, sırasıyla akış üretimi ve torktan sorumlu iki dörtlü akım olan vektör kontrol yöntemi bağımsız olarak kontrol edilir ve mevcut tork üreticisi bileşeninin yanıtı çok hızlıdır, bu nedenle daha hızlı tork kontrolü sağlar ve bu nedenle okuyucu yüksek düzeyde dinamik performansa sahiptir.
Geniş anlamda, tamamen telafi edilmiş bir sürekli akım motoru olarak davrandığı için kafesin indüksiyon motorunun kontrolü vektörü olarak bilinir.
Bu durumda, stator akımları stator veya rotor MMF vektörü ile senkronizmede çalışan bir koordinat çerçevesine referans olarak ifade edilir.
Bu koordinatlarda ifade edilen stator akımları, motordaki akışı ve torku üreten iki dikey bileşende çözülür. Bunlar, tork ve akışın takviye ve alan çerçevelerini bağımsız olarak kontrol edilerek kontrol edildiği sürekli akım motoruna benzer.
Torku ve akışı (böylece hız) indüksiyon motorunda kontrol etmek için, hızlı bir invertör aracılığıyla üç stator akımının (IAS, IBS, ICS) genliğini ve fazını kontrol etmek gerekir.
Bu amaçla, normalde bir CC-TVSI (akım voltaj kaynağı inverter) kullanılır. Böyle bir kontrol algoritması çok dahil olacaktır.
Kullanım, üç ila iki fazın (iyi bilinen bir matris işlemi) dönüşümünden yapılmıştır. İki fazlı akım, ID’ler ve IQ’lar faz karelerinde olmak üzere, iki genliğin kontrolünü ve vektörün kontrolü ile gerçekleştirilen bir fazı gerektirir.
İndüksiyon motoru yönteminin vektör kontrolü, blok diyagramının şekli Şekil 11.63’te gösterilmiştir. Bazı önemli aşamalar aşağıdaki gibidir.
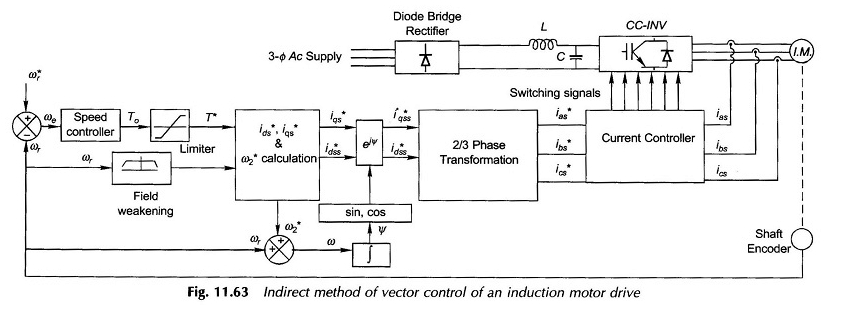
Motor hız sinyali (ωr) ve istenen hızdan (ω * r) ωe hatası belirlenir. Hız denetleyicisi, t *tork sinyalini belirlemek için bir sınırlayıcıdan geçen hızı düzeltmek için gerekli motor torkunu (TO) hesaplar.
Paralel bir alan bloğunda, zayıflayan bir blokta, motor hızı ωR başka bir sinyal üretir.
Bu iki sinyal, i * ds ve i * qs (ideal dörtlü akımlar) ve bir hız düzeltmesi ω * 2 hesaplamak için kullanılır.
Ω = ΩR + ω * r entegre edilmiştir ve daha sonra EJψ dönüşümünü bulmak için kullanılan entegre edilir. (I * ds, i * qs) üzerinde yapılan bu dönüşüm son ideal seti (i * dss, i * qss) verir.
(İ * dss, i * qss) üzerindeki faz 2/3 dönüşümü ideal stator akımını verir (i * as, i * bs, i * cs).
Ölçülen stator akımları (IAS, IBS, ICS) mevcut kontrolör tarafından (i * as, i * bs, i * cs) ile karşılaştırılır ve üretilen altı sinyal indüksiyon motoru tarafından desteklenen akımları kontrol eder.
Yukarıdakiler, indüksiyon motorunun kontrolü için vektör kontrol algoritmasının basitleştirilmiş bir açıklamasıdır.
İndüksiyon motoru vektörünün kontrolünde, rotor akışı stator sarma akımını kontrol ederek düzenlenir. Rotor akışını düzenlemek için konumunun bilgisi de istenir. Rotor akışının konumu tespit edilir veya tahmin edilir.
Sonuç olarak, rotor akış vektörünün konumunu değerlendirmek için benimsenen metodolojilere göre, vektör kontrolüne doğrudan vektör kontrolü veya dolaylı vektör kontrolü denir.