İndüksiyon motorunun voltaj kaynağının invertörünün kontrolü:
İndüksiyon motor kontrolü için değişken frekans ve değişken voltaj güç kaynağı, bir SID voltajı (VSI) veya siklokonveratör invertörden elde edilebilir. İndüksiyon motorunun voltaj kaynağının invertörünün kontrolü burada ve siklokonvertörler tarafından beslenen eğitim.
VSI İndüksiyon Motor Sürücüleri:
İndüksiyon motoru voltaj kaynağı kaynağının kontrolü, bir DC güç kaynağından değişken bir frekans güç kaynağı elde etmeyi mümkün kılar. Şekil 6.37 (a) transistörleri kullanarak bir VSI gösterir. Bir transistör yerine başka herhangi bir öz-demotik cihaz kullanılabilir.
Genel olarak, MOSFET düşük voltaj ve düşük güçlü invertörlerde, IGET (izole kapı ile bipolar transistör) kullanılır ve güç transistörleri ortalama güç seviyelerine kadar kullanılır ve GTO (kapı tiristörü çevirir) ve IGCT (izole kapıdaki tiristör) yüksek güç seviyeleri için kullanılır.

İndüksiyon motoru voltaj invertörünün kontrolü raf dalgası inverter veya darbe genişliği (PWM) olarak kullanılabilir.
Bir yayılma dalga inverter olarak çalıştıklarında, transistörler bir T / 6 zaman farkı ile sayılarının dizisine geçirilir ve her transistör T / 2 süresi boyunca korunur, burada t bir döngü süresidir. Ortaya çıkan çizgi gerilim dalgası Şek.
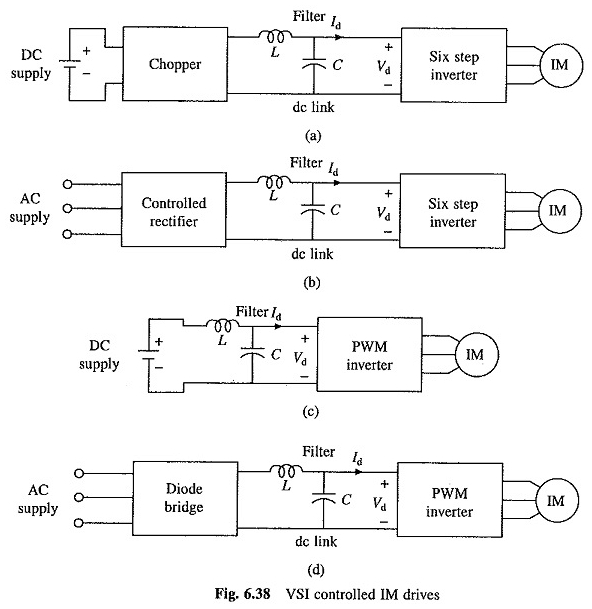
6.37 (b). İnvertörün çalışmasının frekansı, değişen T ile değiştirilir ve invertörün çıkış voltajı, değişken CC giriş voltajının değiştirilmesiyle değiştirilir. Güç kaynağı DC olduğunda, değişken CC giriş voltajı, bir kıyıcı sürekli güç ve invertör arasında bağlanarak elde edilir (Şekil 6.38 (a)).
Güç kaynağı AC olduğunda, değişken CC giriş voltajı, AC gücü ve invertör arasında kontrollü bir doğrultucu bağlanarak elde edilir (Şekil 6.38 (b)).
Doğrultucu veya kıyıcı invertörün çalışmasını sağlamak ve DC bağlantı gerginliğindeki harmonikleri filtrelemek için DC bağlantısına büyük bir elektrolitik filtre kapasitörü C bağlanır.
İnvertör çıkışı ve faz gerilimleri aşağıdaki Fourier serisi tarafından verilmiştir:


Temel faz gerginliğinin RMS değeri

Belirli bir hız için tork, sadece temel bileşen dikkate alınarak hesaplanabilir. Su geçirmez dalga invertörünün ana dezavantajı, çıkış gerginliğindeki büyük düşük frekanslı harmoniklerdir.
Sonuç olarak, bir yayılma dalga invertöründen bir indüksiyon motoru sürücüsü aşağıdaki dezavantajlardan muzdariptir:
- Düşük frekans harmonikleri nedeniyle, motor kayıpları her hızda artar, bu da motorun daralmasına neden olur.
- Motor, rotorun düşük hızda sarsıntılı bir hareketine neden olan beşinci, yedinci, on birinci ve on üçüncü harmonikler nedeniyle titreşen çiftler geliştirir.
- Motor akımındaki harmonik içerik düşük hızda artar. Yüksek oran (VLF) nedeniyle düşük hızda ışık yükleri ile doymuş makine. Bu iki etki, düşük hız makinesini aşırı ısınır, böylece en düşük hızı temel hızın yaklaşık% 40’ıyla sınırlar.
Harmonikler azalır, düşük frekanslı harmonikler ortadan kaldırılır, ilişkili kayıplar azalır ve invertör nabız genişliği tarafından modüle edilmiş bir invertör olarak çalıştığında düşük hızda düzgün hareket elde edilir. İncir.
6.37 (c), darbe genişliğinin sinüzoidal modülasyonu için çıkış gerginliği dalgası şeklini gösterir.
Çıkış voltajı artık darbe genişliğinin modülasyonu ile kontrol edilebildiğinden, giriş CC voltajındaki değişim için herhangi bir hüküm gerekmez, bu nedenle invertör doğrudan bağlanabilir DC [Şek. 6.38 (c)] ve güç kaynağı AC olduğunda bir diyot doğrultucu aracılığıyla. [İncir. 6.38 (d)].
PWM sinüzoidal ile çalışan bir PWM invertörünün çıkış fazı gerginliğinin temel bileşeni,

Modülasyon endeksi nerede.
Motor akımı harmonikleri tork nabzını üretir ve motoru gerektirir. Motor terminalinin kontrolünde verilen harmonik bir içerik için, motor daha yüksek bir sızıntı endüktansına sahip olduğunda, büzülme ve tork darbelerini azaltır.
Sonuç olarak, önemli sızıntı endüktansına (sinüzoidal güç kaynağındaki güç kaynağına kıyasla) indüksiyon motorunun voltaj kaynağının invertörünün invertöründen kullanıldığında kullanılır.
Motor -indüksiyon motoru eğitiminin frenleme ve multiquadrant çalışması:
Motordaki güç kaynağı tarafından verilir
![]()
Veya
V = motor faz gerginliğinin temel bileşeni
East = motor faz akımının temel bileşeni
Φ = V ve IS arasındaki faz açısı.
Otomobil φ <90 ° 'nin işleyişinde, pim bu nedenle pozitiftir, yani invertörün gücünün makineye akmasıdır. Frekansta bir azalma, senkron hızı rotorun hızından ve rotor sürücüleri ile döner hava alanı arasındaki bağıl hızdan daha düşük hale getirir.
Bu, rotorun, rotorun akımını ve rotorun rotorunun dönüşlerini dengeleyen stator akımının bileşenini uyarır. Sonuç olarak, φ açısı 90 ° ‘den büyük hale gelir ve güç akışı tersine çevrilir.
Makine, invertörde jeneratör güç kaynağı olarak çalışır, bu da CC bağlantısının mevcut kimliğini tersine çevirerek CC’deki güç kaynağını besler.
Regeneratif frenleme, invertörden CC bağlantısına akan güç yararlı kullanıldığında ve bir dirençte boşa harcandığında dinamik fren elde edildiğinde elde edilir.
Dinamik Frenleme:
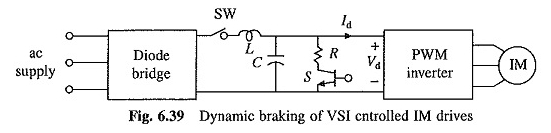
Önce Şekil 6.38 (d) ‘nin darbe genişliği ile modüle edilmiş invertörün dinamik frenlenmesini ele alalım. Dinamik frenleme ile okuyucu Şekil 6.39’da gösterildiği gibi olacaktır.
Dinamik frenleme için, SW anahtarı ve CC bağlantısına bağlı bir RB frenleme direncine sahip seri olarak bir otomatik ticari anahtar (burada transistör) Şekil 6.38 (d) ‘de okuyucuya eklenir. Motor işlemi otoyoldan fren anahtarına gittiğinde SW açıktır.
CC bağlantısında akan enerji kapasitörü yükler ve gerginlikleri artar. Tanımlanmış bir değeri geçtiğinde, anahtar kapandı ve direnci bağlantı üzerinden bağladı.
Üretilen güç ve kapasitörde depolanan enerjinin bir kısmı dirence akar ve CC bağ voltajı azalır. Nominal değerine düştüğünde açıktır.
Böylece, anahtarları CC bağ voltajının değerinin bir fonksiyonu olarak kapatıp açarak, üretilen enerji dirençte dağılır ve dinamik frenleme sağlar. İncir disklerinin dinamik frenleme işlemi. 6.38 (a) ila (c) benzer şekilde elde edilebilir.
Rejeneratif Frenleme:
Önce Şekil 6.38 (c) ve (d) nin nabız genişliği (PWM) tarafından modüle edilmiş dalgalı eğitimin rejeneratif frenlemesini ele alalım. Şek. 6.38 (c), Makinenin çalışması otomobilden frenlemeye geçtiğinde, ID tersine döner ve kaynaktaki enerji kaynağına akar.
Böylece, Şekil 6.38 (c) ‘deki okuyucu zaten rejeneratif bir fren kapasitesine sahiptir. Şekil 6.38 (d) ‘de eğitim durumunda, rejeneratif frenleme için, CC bağlantısına güç kaynağı AC gücüne aktarılmalıdır.
İşlem otomobilden fren kimliğine geçtiğinde, ancak VD aynı yönde kalır. Böylece, rejeneratif frenleme kapasitesi için, bir polaritenin sürekli akım voltajını ve bir veya diğer yönün CC akımını yönetebilen bir dönüştürücü gereklidir.
Bir çift dönüştürücü bu kapasiteye sahiptir ve geçmişte kullanılmıştır. Son diskler, hem sürüş hem de fren işlemleri sırasında CA kaynağının kaynak güç faktörüne sinüzoidal bir akım alır çünkü senkron irtibat dönüştürücüsünü (SLC) kullanır.
Bu nedenle, performansı daha yüksek olmasına rağmen, bir çift dönüştürücüden daha az cihaz gerektirir. Operasyonu ilkesi burada açıklanmaktadır.
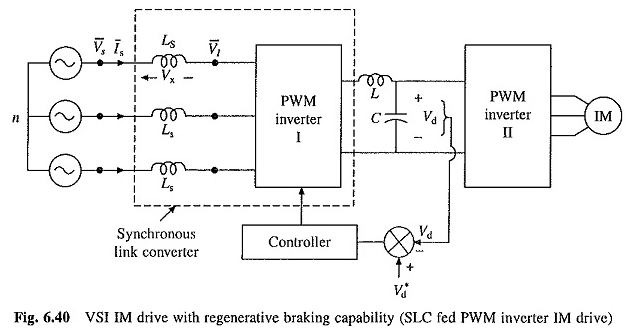
SLC ve PWM invertörlü bir rejeneratif okuyucu, Şekil 6.40’ta gösterilmiştir. LS ve PWM intucts I bir SLC oluşturur.
PWM inverter, genlik ve gerekli fazın bir voltaj VI üretmek için ve düşük harmonik içeriğe sahip, böylece kaynak akımı neredeyse sinüzoidal ve yetkilendirme için VS ile fazda ve frenleme için 180 ° hariç, böylece birimin bir güç faktörünü verir.
Faz diyagramları Şek. 6.41 (a) ve (b). Her biri için değer, verilen fazın V1 ve büyüklük gereklidir. Bu, darbe genişliğinin (PWM) sinüzoidal modülasyonunda kolayca yapılabilir.
PWM sinüzoidal ve V1 fazında, modülasyon sinyalinin genliğine ve fazına bağlıdır [1]. Sonuç olarak, verilen faz ve büyüklüğün V1, genliğin ve gerekli fazın bir modifikasyon sinyali üretilerek üretilebilir.
VI, PWM inverter tarafından üretildiğinden, düşük frekanslı harmonikler içermez. Endüktans LS, neredeyse sinüzoidal bir kaynak akımı üretmek için yüksek frekanslı harmonikleri filtreler. Şekil 6.41’deki faz diyagramları senkron bir makinenin diyagramlarına benzer.
Böylece, senkron bağlantı dönüştürücüsünün davranışı senkron bir makinenin davranışı benzerdir, bu nedenle senkron bağlantı dönüştürücü olarak adlandırılır.

Şekil 6.40’daki okuyucu dengede çalıştığında, SLC tarafından sağlanan arz (soket) PWM II inverter tarafından alınan (sağlanan) elektriğe eşit olmalıdır. İkisi birbirinden bağımsız olarak çalıştığından, bu, CC bağlantı gerginliğinin kapalı bir döngü kontrolünü sağlayarak gerçekleştirilir.
SLC tarafından CC bağlantısına sağlanan besleme, PWM inverter II tarafından alınan güce eşit olduğunda, kapasitörden herhangi bir enerji sağlanmayacak veya alınmayacak ve voltajı sabit ve referans değeri VD *’ye eşit olacaktır.
Şimdi IM üzerindeki yük artarsa, PWM II inverter tarafından DC bağlantısından alınan güç, SLC tarafından sağlanan güçten daha yüksek olacaktır. Bu nedenle, VD kapasitör gerilimi VD *referans değerinin altına düşecektir.
Kapalı döngü voltaj kontrolü IS değerini ve dolayısıyla DC bağlantısına güç kaynağını artıracaktır. Sonuç olarak, CC bağlantı voltajı referans değerine indirgenecektir.
SLC bir destek dönüştürücü olarak çalıştığından, CC bağlantı voltajının kapalı döngü kontrolü, okuyucuya gerilime karşı ve gerginlik sarkmasına karşı bir sürüş kapasitesi sunar.
AC kaynağının voltajı düştüğünde, kapalı döngü voltaj kontrolü, CC bağlanma voltaj sabitini arttırarak korur ve bu nedenle motor sabit bir voltaj sağlanmaya devam eder ve bu nedenle aynı güç ve maksimum torku üretir.
Şekil 6.38 (b) ‘deki okuyucu, bir çift dönüştürücü tarafından kontrol edilen doğrultucuları değiştirerek rejeneratif bir fren kapasitesine sahip olabilir. SLC kullanılamaz, çünkü sabit bir CC bağlanma voltajı gerektirirken, altı aşamalı CC irtibat voltajı değiştirilmelidir.
Şekil 6.38 (a) ‘daki okuyucu, Şekil 5.44’teki iki quadrant kıyıcı (her iki yönde bir polarite ve akım gerilimi sağlayabilen) kullanılırsa rejeneratif bir fren kapasitesine sahip olacaktır.
Dört Çeyrek Operasyon:
Dört çeyrek çalışma, fren kapasitesine sahip herhangi bir sürücü ile elde edilebilir (rejeneratif veya dinamik). Senkron hızı motorun hızından daha düşük hale getirmek için invertör frekansında bir azalma, çeyrek I’in (otomobil ileri) II’ye (ön fren) çalışmasını aktarır.
Makineyi sıfır hıza yavaşlatmak için hız düştüğü için invertörün sıklığı ve gerginliği yavaş yavaş azalır.
Şimdi, invertör çıkış gerginliğinin faz dizisi, yorgun impulsların, örneğin Şekil 6.37 (a) ‘daki çiftler (TRL, TR4) ve (TR3 ve TR6) arasında, invertörün iki ayaklı anahtarları arasındaki değiştirilerek tersine çevrilir.
Bu, Hi Çeyrek İşlemini (Ters Motor) aktarır. Ters yönde gereken hızı elde etmek için invertörün sıklığı ve gerilimi arttırılır.