İndüksiyon motorunda kullanılan Taslak Güç Kurtarma Şeması:
İndüksiyon motorunda kullanılan kayar güç geri kazanım diyagramı – Şekil 6.53, rotoruna enjekte edilen bir voltaj VR ile yara rotorunun bir indüksiyon motorunun eşdeğer bir devresini, dönüşlerin stator -rotor oranının olduğu varsayılarak gösterir. Rotor bakır kaybı ihmal edildiğinde
![]()
burada PR, VR kaynağı tarafından emilen güçtür. Genlik ve PR işareti, büyüklük ve VR fazı kontrol edilerek kontrol edilebilir. PR sıfır olduğunda, motor doğal hız torku özelliği üzerinde çalışır.
Pozitif bir PR PMS’yi azaltacak ve bu nedenle motor aynı tork için daha düşük bir hızda çalışacaktır. PR PG, PM’ye eşit olduğunda ve bu nedenle hız sıfır olacaktır. Böylece, PR’nin 0’dan PG’ye değişimi, senkron hızın hızının sıfır hızda izin verecektir. Bu işlem için VR’nin polaritesi, Şekil 6.53’te sürekli bir çizgi ile temsil edilmektedir.
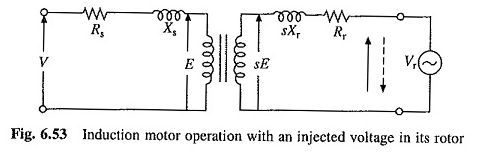
PR negatif olduğunda, IE VR bir güç kaynağı görevi görür, PM PG’den daha büyük olur ve motor senkron hızdan daha yüksek bir hızda çalışır. Senkron hızın üzerindeki hız kontrolü için VR’nin polaritesi, Şekil 6.53’teki noktalı bir çizgi ile temsil edilmektedir.
Rotor bakır kaybı ihmal edildiğinde, PR indüksiyon motorunda kullanılan kayar güç geri kazanım şemasına eşittir, SPG. Senkron hızın altındaki hız kontrolü, kayan güç kontrol edilerek elde edilir. Aynı yaklaşım rotor direncinin kontrolünde de benimsenmiştir.
Bununla birlikte, harici dirençlerde gücü boşa harcamak yerine, burada faydalı bir şekilde kullanılır. Sonuç olarak, bu hız kontrol yöntemleri, indüksiyon motoru geri kazanım modellerinde kullanılan bir kayan güç geri kazanım şeması olarak sınıflandırılır. Bu kalıplardan ikisi, statik Sherbius ve Kramer’in statik eğitimi burada açıklanmaktadır.
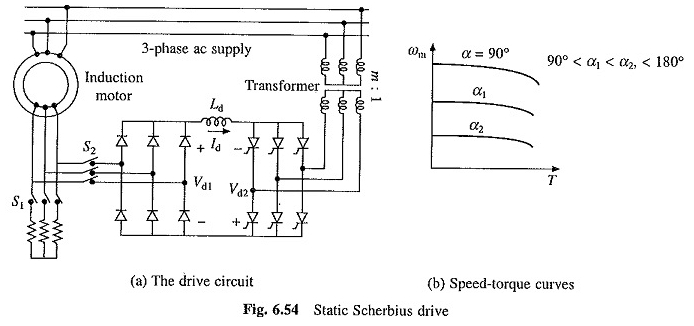
Drive de Scherbius statik (Şekil 6.54 (a)):
Senkron hız altında bir yara rotor motorunun hız kontrolünü sağlar. Rotorun AC gücünün bir kısmı bir diyot köprüsü ile CC’ye dönüştürülür. Bir invertör olarak çalışan kontrollü doğrultucu onu AC’ye dönüştürür ve AC kaynağına döndürür. Güç iade edildi (yani
PR), EMF VD2 inverter sayacı kontrol edilerek kontrol edilebilir, bu da gerginlik açısını kontrol ederek kontrolördür. Mevcut CC bağlantısındaki dalgalanmayı azaltmak için CC bağ endüktansı sağlanır.
İndüksiyon motorunda kullanılan kayan gücün kurtarma şeması kaynağa verildiğinden, dirençte boşa harcandığı rotor direncinin kontrolünden farklı olarak, sürüş yüksek verimliliğe sahiptir.
Okuyucu, aynı nedenlerle AC voltaj kontrolörleri tarafından stator voltaj kontrolünden daha yüksek verimliliğe sahiptir.
Sürüş giriş gücü kaynağı, motor giriş gücü ile döndürülen güç arasındaki farktır. Reaktif giriş gücü, motorun ve invertörün reaktif güçlerinin toplamıdır. Bu nedenle, disk operasyonunun plajı boyunca kötü bir güç faktörü vardır.
Şekil 6.54 (a) ‘da, statoru ve rotor damlalarını ihmal etmek

Burada α, invertörün ve n ve m’nin çekim açısıdır, sırasıyla, transformatörün dönüşünün dönüştürücü ile motor oranının ve kaynağın tarafının dönüşünün stator / rotor oranıdır. İndüktörden düşmeyi ihmal et
![]()
İkame denklemleri. (6.93) ve (6.94)

burada a = n / m.
İnvertör tiristörlerinin güvenli bir şekilde değiştirilmesi için maksimum α değeri 165 ° ile sınırlıdır. Α 90’dan 165 ° ‘ye gittiğinde vardiya 0’dan 0.966a’ya kontrol edilebilir. Uygun A seçeneği ile gerekli hız aralığı elde edilebilir.
Transformatör, VD1 ve VD2 voltajlarına karşılık gelmek için kullanılır. Okuyucunun en düşük hızında, VD1 tarafından verilen maksimum VD1M değerine sahip olacak
![]()
burada Smax en düşük hızda kaymanın değeridir. Α 165 ° ile sınırlıysa, m, α 165 ° olduğunda, invertör gerginliğinin VD1M değerine sahip olacak şekilde seçilir

Böyle bir M seçeneği, invertörün en düşük motor hızında en yüksek atış açısında işleyişini sağlar, en yüksek güç faktörünü (Eqn. (5.109)) ve en düşük hızda en düşük reaktif gücü sağlar.
Bu, borudaki güç faktörünü geliştirir ve reaktif gücü okuyucunun hız aralığının tüm hızlarına düşürür.
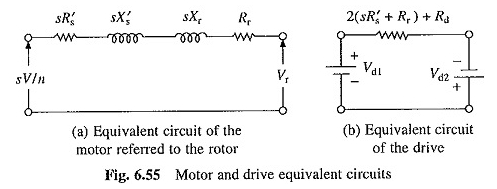
Şekil 6.55 (a), mıknatıslanma dalını ihmal eden rotora atıfta bulunan eşdeğer bir motor devresini göstermektedir. Denklem türetimi. (6.90), DC bağlantısına atıfta bulunduğunda direnci (SR’nin + RR) 2 (SR + RR) olacağını gösterir. Bu, okuyucunun eşdeğer bir devresi CC yaklaşık verir (Şek.
6.55 (b)), burada denklemlerde VD1 ve VD2 verilir. (6.93) ve (6.94). RD, DC bağlantı endüktansının direncidir. Eşdeğer devre, diyot köprüsünün üzerinden geçmeyi yok sayar. ŞİMDİ

Rotorun bakır kaybı ihmal edilirse
Hız torku eğrilerinin doğası Şekil 6.54 (6) ‘da temsil edilmektedir.
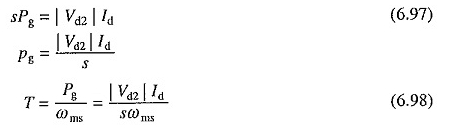
Okuyucunun fan disklerinde ve pompada yalnızca dar bir aralıkta hız kontrolü gerektiren uygulamaları vardır. Maksimum kayma Smax ile gösterilirse, diyot köprüsünün güç değerlendirmeleri, invertör ve transformatör motorun gücünün sadece Smax katı olabilir (Denk. 6.97).
Örneğin, hız senkron hızın sadece% 20 oranında azaltılması gerektiğinde, diyot köprüsünün, invertörün ve transformatörün güç değerlendirmeleri motorun gücünün sadece% 20’si olacaktır. Bu nedenle, sürücünün düşük bir maliyeti vardır.
Okuyucu, S1 kapalı ve S2 açık ile direnci kontrol edilerek başlatılır (Şekil 6.54). Hız okuyucunun kontrol aralığına ulaştığında, diyot köprüsünü bağlamak için S2 kapatılır ve invertör etkinleştirilir. Şimdi S1 direnci ortadan kaldırmaya açık.
Fanlarda ve pompa eğitiminde frenleme gerekli değildir, çünkü sıvı basıncı yeterli fren torku sağlar. Basınç kafasındaki varyasyonlar ve pompalanan sıvının doğası ile sabit bir sıvı akışı korumak için okuyucu kapalı döngü hız kontrolü ile kullanılır.
Dahili akımın kontrolü ile kapanış döngü hızının bir kontrol şeması Şekil 6.56’da gösterilmiştir. Şekil 3.5’in diyagramıyla aynı şekilde çalışır.
Bu disk, yüksek verimlilik ve düşük maliyet nedeniyle orta ve yüksek fan ve pompa eğitiminde (yaklaşık 10 MW’a kadar) yaygın olarak kullanılmaktadır.
Bu disk sabit tork kontrolü sağlar (eqn. (6.98)). Sabit güç kontrolü, aşağıda açıklanan statik Kramer oynatıcı tarafından elde edilir.
Kramer Statik Drive:
Rotorun kayma gücü bir diyot köprüsü ile CC’ye dönüştürülür (Şekil 6.57 (a)). CC gücü artık indüksiyon motoru ile mekanik olarak birleştirilmiş bir CC motoruna dönüştürülüyor. Masraf olarak sağlanan çift, indüksiyon ve doğrudan akım motorları tarafından üretilen bir tork toplamıdır. Hız kontrolü, sürekli akım motorunun alanı kontrol edilerek elde edilir.

Şekil 6.57 (b), VD1 ve VD2’deki iki DC motor güç akımı değeri için bir hız ile varyasyonları göstermektedir. Kalıcı çalışma, IF1 ve IF2 alanları için VD1 = VD2, yani à A ve B olduğunda elde edilir.
Hız kontrolü, senkron hızın yarısının yaklaşık yarısının senkron hızında mümkündür. Daha büyük bir hız aralığı gerektiğinde, diyot köprüsü bir tristör köprü ile değiştirilir.
Şimdi, VD1 ve hız arasındaki ilişki, tristör doğrultucuunun doğrultucu öfkesini kontrol ederek değiştirilebilir (bkz. Şekil 6.57 (c)). Hız artık durana kadar kontrol edilebilir.