İndüksiyon motorunun rotor direncinin kontrolü:
İndüksiyon motorunun rotor direncinin kontrolü için tork hız eğrileri Şekil 6.50’de verilmiştir. Maksimum tork rotor direncinden bağımsız olsa da, maksimum torkun üretilme hızı rotor direnci ile değişir. Aynı tork için hız, indüksiyon motorunun rotoruna karşı direncin kontrolünde bir artışla düşer.

İndüksiyon motorunun rotor direncini kontrol etmenin avantajı, motor tork kapasitesinin düşük hızda bile değişmeden kalmasıdır. Yalnızca bu avantaja sahip başka bir yöntem değişken bir frekans kontrolüdür.
Bununla birlikte, indüksiyon motorunun rotor direncini kontrol etmenin maliyeti, değişken frekans kontrolüne kıyasla çok düşüktür.
Düşük maliyet ve yüksek hızda yükseltilmiş tork kapasitesi nedeniyle, vinçlerde rotor direncinin kontrolü, Ward Leonard Ilgener oyuncularında ve diğer aralıklı yük uygulamalarında kullanılır.
Büyük bir dezavantaj, rotor devresine bağlı dirençteki ek kayıplar nedeniyle düşük verimliliktir. Kayıplar esas olarak dış dirençte gerçekleştiğinden, motordan kaçmazlar.
Geleneksel yöntemler:
Değişken direnç elde etmek için bir dizi yöntem kullanılır. Davul kontrolörlerinde, birkaç adımda döner anahtarlar ve bölünmüş direnç kullanarak direnç değişir. Değişken direnç seri kontaktörler ve dirençler kullanılarak da elde edilebilir.
Yüksek güçlü uygulamalar, bir elektrolite daldırılmış, tuzlu sudan oluşan üç elektrottan oluşan bir kayan regülatör kullanır. Direnç, elektrotlar ve dünyevi elektrot arasındaki mesafeyi değiştirerek değişir.
Güç yüksek olduğunda, elektrotlar küçük bir motor tarafından sürülür. Bu yöntemin avantajı, direncin adım atmadan değiştirilebilmesidir.
Statik Rotor Direnç Kontrolü:
Rotor direnci, Şekil 6.51’de devre kullanılarak adım atmadan da değiştirilebilir. Rotorun rotor çıkış voltajı, bir diyot köprüsü ile düzeltilir ve bir TR transistörü tarafından yapılan sabit bir direnç R ve bir yarı iletken anahtarın paralel bir kombinasyonu ile sağlanır (Şekil 6.51).
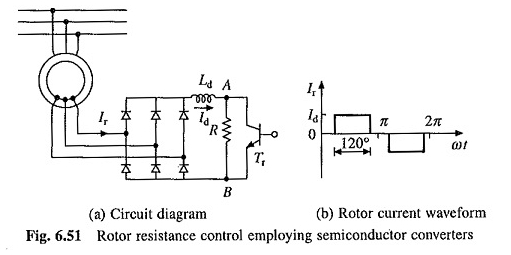
A ve B, RAB terminalleri arasındaki direncin etkili değeri, TR transistörünün değişken bir hizmet raporu ile değiştirilir ve bu da rotor devresine direnci değiştirir. Mevcut CC bağlantısında dalgalanmayı ve süreksizliği azaltmak için LD endüktansı eklenir.
Rotor akımının dalga şekli belirtilecektir. Şekil 6.5104’te dalgalanma ihmal edildiğinde. Böylece, RMS rotorunun akımı

Transistör açıkken A ve B terminalleri sıfırdır ve söndürüldüğünde R olacaktır. Sonuç olarak, terminaller arasındaki direncin ortalama değeri tarafından verilir
![]()
burada δ transistörün hizmet raporudur ve denklem tarafından verilir. (5.112).
Rab tarafından tüketilen güç
![]()
Denklemler. (6.88) ve (6.89), aşama başına RAB tarafından tüketilen güç

Denklem (6.90), faz başına rotor devresine karşı direncin 0.5R (1 – δ) arttığını düşündürmektedir. Böylece, faz başına rotor devresinin toplam direnci

RRT, RR’den (RR + 0.5R) değiştirilebilir, çünkü Δ 1’den 0’a kadar gitti.
Dahili akım kontrol döngüsüne sahip bir kapalı döngü hız kontrol diyagramı Şekil 6.52’de gösterilmiştir. Rotor IR akımı ve bu nedenle kimlik, hem motor hem de fiş sırasında maksimum tork noktasında sabit bir değere sahiptir.
Mevcut sınırlayıcı bu akıma doyurulacaksa, okuyucu maksimum torku hızlandırır ve yavaşlatır ve çok hızlı bir geçiş yanıt verir. Fişin oluşması için, faz dizisinin tersine çevrilmesi için düzenleme alınmalıdır.
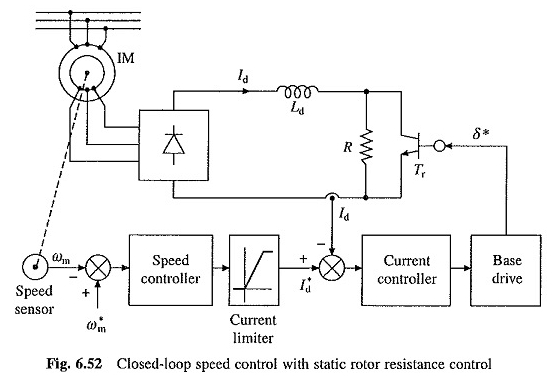
İndüksiyon motorunun geleneksel rotor direnci kontrolü ile karşılaştırıldığında, statik rotora karşı direnç kontrolü, düzgün ve adım olmadan, hızlı tepki, daha az bakım, kompakt boyut, basit kapalı döngü kontrolü ve rotor direnci gibi çeşitli avantajlara sahiptir.