Tek faz indüksiyon motoru:
Tek bir fazlı indüksiyon motoru, stator ve normal sincap rotoruna tek bir faz dağıtılmış sarma içerir, şekil 10.1’de gösterildiği gibi, rahatlık için, stator sargısının konsantre formda gösterildiği.

Bu motoru analiz etmek için iki önemli yöntem vardır:
- Enine alan teorisi ve
- Dönen alanlar teorisi.
İkincisi daha önce ilerleyen üç faz indüksiyon makinesinin teorisine benzediğinden, burada benimsenecektir.
İki dönen alan gibi titreşen alan:
Şekil 10.1, stator sargısı ve sincap kafesli bir rotor ile tek fazlı bir indüksiyon motorunun şematik şemasını vermektedir. Sargı, MMF’nin temel alanı gerçek MMF dağılımının en baskın bileşeni olacak şekilde uzaya dağıtılır.
MMF’nin mekansal harmonikleri, üç aşamadaki bir indüksiyon motorunda olduğu gibi, daha sonra göz ardı edilecektir. Sargı sinüzoidal bir akım taşıdığında, zaman içinde pulsat pulsat tepe değeri olan sinüzoidal olarak uzaya dağıtılmış bir MMF üretir. Sargı ekseni gösterildiği gibi, herhangi bir açıdaki MMF
![]()
burada θ sarma ekseninden ölçülen açıdır. ŞİMDİ
![]()
böylece MMF’nin hem bir alan dağılımına hem de ifade edilen zaman
![]()
Bu denklem formda trigonometrik manipüle edilebilir

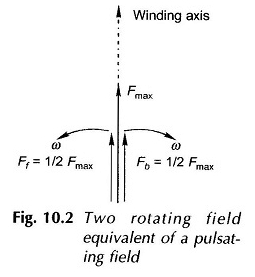
Denklem (10.4) bize, darbeli bir faz alanının, zıt yönlerde eşzamanlı bir hızda (ω = 2πf seçilmiş. Rad / s) çalışan iki döner alanın bir üst üste konumu olarak kabul edilebileceğini söyler:

Bu iki alan (1/2) fmax’a eşit bir genliğe sahiptir, burada fmax, sarma ekseni boyunca MMF darbesinin maksimum değeridir. Tek bir darbeli alanın zıt yönlerde çalışan iki döner alanda bölünmesi Şekil 10.2’de gösterilmektedir.
Bu şekil, döner alanların, sarma ekseni boyunca MMF’nin + fmax olduğu bir zamanda konumunu göstermektedir.
İki dönen alana kıyasla rotor kayma:

Şekil 10.1’de gösterilen benzersiz durum için, Şekil 10.3, ön alan yönünde N hızında çalışan rotor ile döner alanları ileri ve geri göstermektedir. Rotorun döner alan ileri ff’ye göre kayması

Rotor, dönme alanı FB’ye göre kayar

Böylece, iki döner alanla karşılaştırıldığında rotor slaytlar farklıdır ve (10.5a) ve (10.5b) denklemleri tarafından verilir.
Tek faz indüksiyon motorunun motorunun hızının karakteristiği:
Sabit bir rotor durumunda (n = 0, yani S = 1), iki döner alan, aynı kayma ile rotorun önünde kayar, (bkz. EQS (10.5a) ve (10.5b)), sincap rotorunda eşit akımlar indükler.
İki döner alanı aynı dirence sahiptir ve eşit ve zıt çiftler üretir, bu da sıfır değeri net bir başlangıç torkuna yol açar. Bu nedenle tek tek vakum tek fazlı indüksiyon motoru, uygun olmayan bir başlangıçtır.
Buna ek olarak, iki döner alanı, stator sarısının düşük bir sızıntı empedansını üstlenerek uygulanan gerginliği dengeleyen stator ile sonuçlanan bir EMF’ye neden olur.
Bununla birlikte, rotor, ön alan yönünde N Speed N’de çalışacak şekilde tasarlanmışsa, iki vardiya şimdi S ve (2 – s).
Normal çalışma (2 – s) ≫ s ve bu nedenle, arka plan tarafından indüklenen rotor akımları durdurulduğundan çok daha yüksektir ve daha düşük bir güç faktörüne sahip olur.
Karşılık gelen karşıt rotor MMF, stator empedansı varlığında, tarladan arkaya önemli ölçüde azalmaya yol açar. Öte yandan, düşük kaymaya doğru döner alan, rotorda daha yüksek bir güç faktörünün daha küçük akımlarını durdurulduğundan daha yüksek akımlara indükler.
Bu, ön akış dalgasında büyük bir gelişmeye yol açar.
Alandan arkaya yapılan bu azalma ve ön alanın güçlendirilmesi, kayma ve ön yöndeki rotorun hızı senkron hıza yakın hale geldikçe, kayma ve fark artar.
Aslında, senkron hıza yakın, ön alan birkaç kez alan olabilir. Sonuç olarak, net bir çift var. İki alan, uygulanan gerginliği dengelemek için her zaman statorun EMF sargısını indüklemelidir.
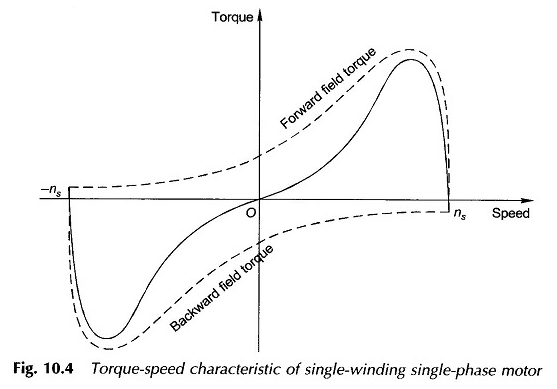
İki tork hızı özelliğinin (ön ve arka) toplamı olarak tork hızının tam özelliği Şekil 10.4’te çizilmiştir.
Bir alanın zayıflaması ve diğerinin eşzamanlı takviyesi, senkronize yakın hız bölgesindeki üç fazlı bir indüksiyon motorunun gibi tork hızının bir özelliğine yol açar. Sıfır başlangıç torku gerçeği burada hemen gözlenir.
Ön alan ve rotorun arkasına doğru reaksiyon alanı ve rotorun arka arka planı ve ön reaksiyon alanı, sıfır ortalama değere sahip ikinci bir harmonik darbeli tork üreten 2N nispi hızları ile zıt yönlerde hareket eder.
Sonuç olarak, tek fazlı bir indüksiyon motoru, böyle titreşimli torku olmayan 3 fazlı bir motordan en gürültülü bir motordur. Sabitleme torku aslında tek bir faz devresindeki titreşen gücün doğrudan bir sonucudur.
Aslında, tek bir faz indüksiyon motorunun tork hızının karakteristiğinde, tork sırası ortalama torku temsil eder.
Yarı kantitatif analiz:
Tek bir tek seferlik motorun devre modelini yarı kantitatif bir temelde geliştirmek için sezgisel argümanlar kullanılacaktır. Sabit rotorlu motor, Şekil 2’de gösterildiği gibi bir devre modeline sahip bir transformatör görevi görür.
10.5 (a), Core-Dédoute şubesi göz ardı edildi. Statordaki m eki ana sargıyı ifade eder ve EM, alternatif alan tarafından yapılandırılan stator tarafından EMF indüklenir.
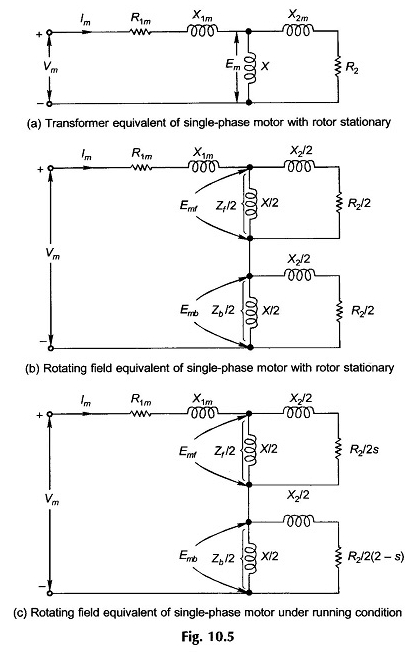
Motor şimdi döner alan teorisi açısından görülüyor. Ortaya çıkan indüklenen EMF, aynı direncin iki karşıt döner alanı tarafından indüklenen iki eşit bileşenden oluşur, yani
![]()
Mıknatıslanma ve rotor empedansları, Şekil 10.5 (b) ‘de gösterildiği gibi seri olarak bağlanan iki eşit yarıya ayrılır; Motor, her döner alana karşılık gelen A Serisine bağlı iki motor gibi davranır.
İki bileşenli motorun devreleri sabit durumla aynıdır, çünkü rotor her döner alana kıyasla aynı kaymaya sahiptir.
Rotor, ön alana kıyasla Hız N’de çalıştığında, kayma ona kıyasla S ve (2 – s) döner alana kıyasla arkaya doğru, böylece devre modeli şimdi Şekil 10.5 (c) ‘de olduğu gibi değiştirir.
Bu rakamdan ZF / 2 ≫ ZB / 2 ve dolayısıyla EMF ≫ EMB’nin, yani ön alan motor etkisinin baskın olduğunu ve devam eden bir çift oluşturduğunu kolayca görebiliriz.
Pratik ihtiyaç, iki döner alanın, kendi kendine başlayan kendi kendini başlatan sabit koşullarda eşit olmayan bir güce sahip olacak şekilde tasarlandığını belirler.
Bu, ana sargı ile mekansal kareleme içinde olan ve daha az sayıda ince dönüş içeren yardımcı sargı adı verilen motorda bir sarma daha gerektirir.
Motor başladıktan sonra bu sargı devreden kesilebilir, ancak kapasitör tarafından yönetilen ve genel güç faktörü için iyileştirme hizmetine bağlanabileceği motor olması.
Performans Analizi:
Tek fazlı bir indüksiyon motorunun performansı, üç fazda bir indüksiyon motoru için yapıldığı gibi, Şekil 10.5 (c) ‘de verilen motor devre modelinin analizi ile elde edilebilir.
Sonuçlar üç aşamada bir indüksiyon motoruna benzer, çünkü devre modeli esasen aynıdır.
Ön ve arka alanlar için hava boşluğu güçleri tarafından verilir.

IM, ana sarma akımıdır ve RF ve RB, Şekil 10.5 (c) ‘de sırasıyla Z̅f ve Z̅b karmaşık sayısının empedanslarının gerçek kısımlarıdır.
Her iki alan tarafından üretilen çiftler olarak ifade edilebilir.

burada ωs = rad / s cinsinden senkron hız.
İki alan zıt yönlerde çalıştığından, ikisi tarafından üretilen çift karşı. Bu nedenle, gelişen çiftin

Rotor bakır kayıpları genellikle hava gücünün kayma sürelerine eşittir. Bu yüzden

Brüt mekanik bir şekle dönüştürülen elektrik gücü

Denklem (10.11) ayrıca yazılabilir.

Bu, statorun bakır kaybını ihmal eden motora elektrik besleme girişinin
![]()