Tek faz indüksiyon motorunun eşdeğer devresi:
Tek faz indüksiyon motorunun eşdeğer devresi – dengesizlik ve ana ve yardımcı sargıların aynı diyetle güçlendirilmesi, ana ve dengesiz yardımcı alanlara yol açar.
Sargı eksenleri boyunca faz, (10.17a) ve (10.17b) denklemleri ile gösterildiği gibi f̅f ve f̅b simetrik bileşenlerine bölünebilir.
F̅f ve JF̅F öne doğru yapılan bileşen ileri bir döner alan üretir; Benzer şekilde, arka bileşen f̅b ve -jf̅b’yi tanımlar.
İki döner alanla karşılaştırıldığında rotorun kaymaları, (10.5a) ve (10.5b) denklemleri ile gösterildiği gibi sırasıyla S ve (2 – S) ve sonuç olarak, ana sargıya referans olarak iki döner alan tarafından görüldüğü gibi mıknatıslama ve rotor devreleridir ve Şekil 10.22 (a) ve 10.22 (b) ‘de gösterilir.

Boş kayıpların ihmal edildiğine ve iki devrede çekirdek çekirdek iletkenliğin gösterilmediğine dikkat edilmelidir. Ana sargıdan önce alanın neden olduğu EMF, FEM tarafından görülen empedans,

ve ana sargıyı arka alan tarafından indüklenen EMF tarafından gözlemlenen empedans,

Bu yüzden
![]()
Ve
![]()
Veya
- I̅MF = Ana sargedeki ön bileşen akımı
- İ̅mb = ana sargedeki bileşen akımı
Elbette
![]()
(10.16a) ve (10.16b) denklemleri artık mevcut bir forma dönüştürülecektir.

Ayrılmak
NM = eşdeğer ana dönüş sayısı
NA = eşdeğer yardımcı sarma dönüşleri
Tanımlamak

Sonra (10.16a) ve (10.16b) denklemlerinden

(10.32a) ve (10.32b) denklemlerinin

Yardımcı sargedeki akım i̅a’dır, ancak yardımcı ve ana sargının dönüşleri farklı olduğundan, ana sargısız olarak görülen yardımcı sarma akımı eşittir.

(10.33a) ve (10.33b) denklemlerinden, min sarınımına referans olarak posta ve yardımcı sarma akımlarının simetrik bileşenleri olarak ifade edilebilir.

Ön alan 90 ° seçilen yardımcı sargıya ulaşır. Ana sargıdan önce ve dönüm arka planı için tam tersi. Böylece, iki alan tarafından indüklenen yardımcı sargıdaki EMF’ler:

Ayrıca ana ve yardımcı sarma terminal gerilimlerini bırakın, sırasıyla v̅m ve v̅a olun. Yardımcı sarma gerilimi, ana sargımda gösterildiği gibi (VA / A) ‘ya eşittir. Bu gerilim seti, simetrik bileşenlere de bölünebilir.

veya dönüşümlü olarak
Şimdi V̅M ana sarma terminal voltajını düşünün. Üç bileşen içerir: EMF, döner alandan ileri doğru indükler, EMF döner alan tarafından arkaya doğru indükler ve onu geçen IM akımı nedeniyle iyileşme empedansındaki voltaj düşüşü. Bu yüzden

E̅MF ve E̅MB des EQ (10.29a) ve (10.29b)

Şekil 10.23 (a) ‘da tek faz indüksiyon motorunun eşdeğer devresi ile temsil edilir.

Benzer şekilde, V̅A yardımcı sarma terminal gerilimi üç bileşen içerir,
Demek

burada Z̅1a, genel olarak kapsayıcı bir kapasitöre (başlangıç / yarış kapasitörü) sahip olan yardımcı sargının makara empedansıdır. (10.36a) ve (10.36b) denklemlerini kullanarak,

Tek faz indüksiyon motorunun eşdeğer temsili devresi dahil, Şekilde (10.23b) verilmiştir.
AM’nin denklemin yerine geçmesi. (10.33a) denklemde. (10.39b),
![]()
Ayrıca denklemin AI’sını değiştirir. (10.33b) denklemde. (10.40c),

EQS (10.41a) ve (10.41b) ‘de ifade edildiği gibi V̅M ve V̅a ile EQ (10.38a) ve (10.38b) elde ediyoruz.

Kararlı

(10.42a) ve (10.42b) denklemleri olarak yazılabilir.

(10.44a), (10.44b) ve (10.37a) denklemleri, Şekil 10.24’teki tek faz indüksiyon motorunun eşdeğer devresiyle temsil edilir.
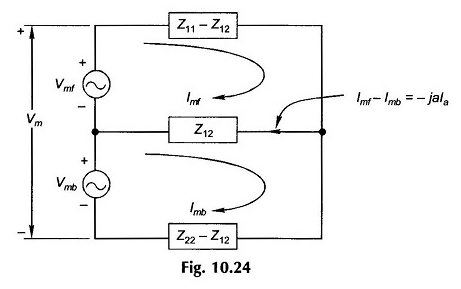
Ayrıca not ediliyor

Bunlardan, Şekil 10.24’teki tek fazlı indüksiyon motorunun eşdeğer devresi, Şekil 10.25 biçiminde çizilebilir. Şekil 10.25’te, çalışma durumundaki yardımcı sargının ayrılması, S anahtarı.
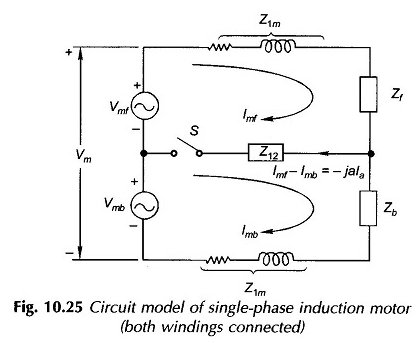
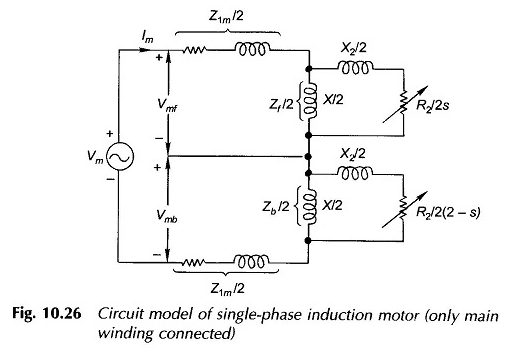
Yardımcı sarma bağlantısı kesildikten sonra.

Akımı ikiye katlayarak ve empedansı Şekil 10.26’daki devre modelinin yarısına düşürerek elde edilir. Sezgisel olarak Şekil 10.5 (c) ‘de sunulanla aynı devre modeli olduğunu görebiliriz.
Denklemler. (10.42a) ve (10.42b),
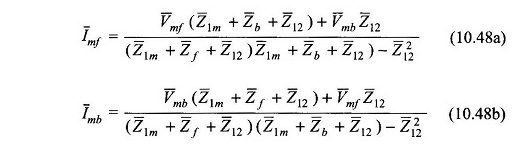
Sarma akımları daha sonra tarafından verilir
Geliştirilen tork ve mekanik güç

Belirli bir hızda dengeli çalışma için kapasitör empedansı:
Dengeli tek bir faz işlemi için

veya denklem. (10.48b)
Denklemin. (10.38b)

Tek faz işlemi için

Denklemin yerine geçme. (10.54) denklemde. (10.53)

Denklemde tanımlanmış Z̅12 ile. (10.43b)