Üç faz indüksiyon motoru:
Üç faz indüksiyon motoru iki tiptir: sincap kutusu ve yaraların rotoru.
Sincap kafesinde, rotor, her iki uçta dairesel konektörler tarafından kısa devre döndürülen uzunlamasına sürücü çubuklarından oluşurken, yara rotorunun motorunda, rotor ayrıca stator sargısı ile aynı direkle dengeli bir üç fazlı sargıya sahiptir. Bununla birlikte, her ikisinde de, stator üç faz dağıtılmış bir sargı giyer.
Analiz ve Performans:
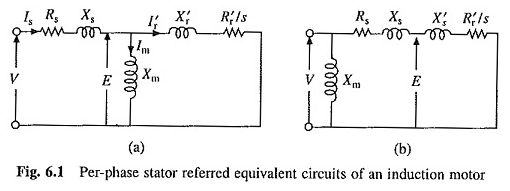
Üç faz indüksiyon motorunun fazı ile eşdeğer devre, Şekil 6.1 (a) ‘da temsil edilmektedir. RR ve X′R, RR rotorunun direncinin statorunun ve rotor XR’nin reaktanının atıfta bulunulan değerleridir. Vardiya tarafından tanımlanır

burada ωm ve ωm’ler sırasıyla rotor ve senkron hızlardır. Daha öte

burada F ve P, sırasıyla gıda sıklığı ve kutup sayısıdır.
Stator’un empedanstaki düşüşü, terminal V voltajı V’ye kıyasla genellikle ihmal edilebilir olduğundan, eşdeğer devre Şekil 6.1 (b) ‘de gösterilene basitleştirilebilir.
Ayrıca denklem. (6.1)
![]()
Şekil 6.1 (b) ‘de,

Rotora (veya hava gücüne) aktarılan güç
![]()
Rotorun bakır kaybı
![]()
Mekanik güce dönüştürülmüş elektrik gücü

Motor tarafından geliştirilen tork
![]()
İkame denklemleri. (6.3) ve (6.7)

Denklemin yerine geçme. (6.4) verir
Denklemlerin karşılaştırılması. (6.5) ve (6.9)

Ağaçtaki motor çıkış torku, geliştirilen torktan sürtünme ve çekirdek çekirdek çiftlerinin düşülmesiyle elde edilir.
Gelişmiş tork sadece kaymaya bağlıdır (Denk. (6.10)). T’nin (6.10) ‘daki farklılaşması ve sıfıra asimile edilmesi, maksimum tork için kayma sağlar 
Denklemin yerine geçme. (6.12) ‘de (6.10) maksimum tork için bir ifade verir

Maksimum tork da hata torku olarak da bilinir. Rotor direncinden bağımsız olmasına rağmen, SM rotora karşı dirençle doğru orantılıdır.
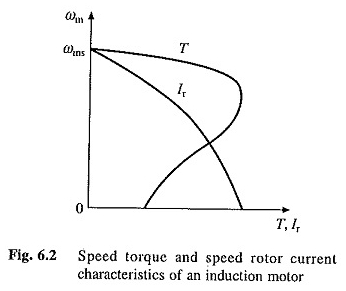
Hız ve hız hızı özelliklerinin doğaları Şekil 6.2’de temsil edilmektedir. Rotor akımı ve tork, senkron hızda sıfırdır. Hızda bir azalma ile her ikisi de artar.
Çift arıza değerine ulaştıktan sonra azalırken, rotor akımı artmaya devam ederek sıfır hızda maksimum değere ulaşır. Tam yük hızındaki düşüş rotor direncine bağlıdır.
Rotor direnci düşük olduğunda, düşüş oldukça küçüktür ve bu nedenle motor esas olarak sabit bir hızda çalışır. Arıza torku, motorun kısa vadeli tork aşırı yük kapasitesinin bir ölçüsüdür.
Motor döner alan yönünde çalışır. Döner alanın yönü ve bu nedenle, motor dizisini tersine çevirerek motor hızı tersine çevrilebilir. Faz dizisi, iki motor terminali değiştirilerek tersine çevrilebilir.
Bazen tork, sadece hesaplamaları kolaylaştırmakla kalmayıp aynı zamanda hız hızı özelliklerinin doğasının hızlı bir şekilde takdir edilmesine izin veren SM ve Tmax açısından ifade edilir. Denklemi bölün. (6.10) (6.13) ile verimleri (6.12) değiştirin
Hız hızı özelliklerinin doğası (Şekil 6.2) artık denklem ile kolayca açıklanabilir. (6.14).
SM’den çok daha küçük vardiyalar için, payda ikinci terimi hakimdir. Bu nedenle, 0’ın nominal torkla hız hızı ilişkisi yaklaşık olarak düz bir çizgi ile temsil edilir.
SM’den çok daha büyük slaytlar için, payda ilk terimi hakimdir ve hız arsa ilişkisi bu bölgede hiperbolik bir form alır.
Motor çalışmasının motoru boyunca, (RSSM / RSR) terimi 1’e kıyasla küçüktür ve sonuçta payda baskındır. Bu nedenle, denklemden silinebilir. (6.14). Bu yüzden

Özel tasarımlara sahip indüksiyon motorları:
Genel kullanım için bir indüksiyon motoru, iyi çalışma performansına sahip olmak için düşük yüklü slaytla çalışmak üzere tasarlanmıştır. Nota göre, tam yük%2 ila 7 arasında değişir.
Böyle bir motor yüksek başlangıç akımına (5-8 kez) ve düşük başlangıç torkuna (biletlerin tam yükleme şarj torkunda tam yük) sahiptir. Bazı uygulamalar motorun farklı tasarlanmasını gerektirir. Bazıları:
Yüksek -kayma indüksiyon motorları:
Aralıklı şarj uygulamaları için, uzun süreler boyunca düşük hızda sık sık sık sık ve / veya çalıştırma ve / veya çalıştırma için indüksiyon motorları rotora karşı yüksek dirençle tasarlanmıştır.
Bu motorlar düşük bir başlangıç akımına ve yüksek başlangıç torkuna sahiptir, ancak yüksek rotor bakır kaybı nedeniyle düşük tam yük verimliliğine sahiptir. Bu motorlar büyük bir değişimde çalıştığından (tam yükte% 10 ila 40 arasında), bunlara yüksek kayar motorlar denir.
Yüksek kayar motorlar, stator voltajını kontrol ederek ve iki kare -cake ve yaranın rotoru arasındadır. Bu motorların atış hızı özelliklerinin doğası Şekil 6.3 (c) ‘de temsil edilmektedir.
Sincap vakalarının indüksiyon motorlarında, iyi başlangıç performansı (düşük başlangıç akımı ve yüksek başlangıç torku), derin çubuk veya çift kafes rotor rotor motorları kullanarak tam yük performansını önemli ölçüde etkilemeden yapılır.
Hız tam yükte durmadan geçerken rotorun frekansı 50 Hz’den 1-3 Hz’ye gider: rotor frekansındaki değişim, bu motorlarda tam hızda çok küçük bir değerde yüksek değerde rotora karşı direnci değiştirmek için kullanılır.
Bu nedenle, başlangıç ve düşük hız performansı iyileştirilmesine rağmen, tam yük performansı önemli ölçüde gerçekleştirilmez.
Sincap Yardımcısı İndüksiyon İndüksiyon Motoru:
Makine statörü, genel kullanım için bir indüksiyon motoru ile aynıdır. Rotor, Şekil 6.3 (a) ‘da gösterildiği gibi derin ve dar sürücü çubuklarına sahiptir.
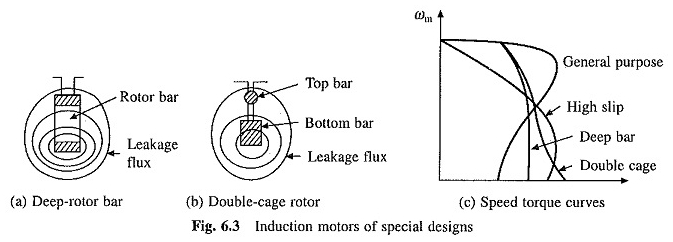
Çubukta akım tarafından üretilen yuva sızıntısı akışları da şekilde gösterilmiştir. Çubuğun paralel bağlı belirli sayıda dar katmandan yapıldığı düşünülebilir. Üst ve alt katmanların davranışını karşılaştıralım.
Alt katmanla üst katmandan daha fazla sızıntı akışı bağlantısı. Sonuç olarak, alt tabaka üst tabakadan çok daha yüksek bir sızıntı endüktansına sahiptir. Rotorun frekansı düşük hızda yüksek olduğundan, alt tabakanın reaktansı ve empedansı üst tabakadan çok daha yüksektir.
Sonuç olarak, düşük hızlarda, en yüksek akım miktarı alttaki en yüksek ve en düşük tabaka tarafından taşınır. Akımın çubuğun enine kesitinden eşit olmayan dağılımı nedeniyle, rotorun etkili bir direnci yüksektir ve başlangıç performansı ve düşük hızda iyileştirilir.
Neredeyse tam yük hızında, rotor akımının frekansı ve sızıntı reaktansı düşüktür. Sonuç olarak, akım çubuğun enine kesitinden de dağıtılır ve rotorun etkili direnci düşük bir değere sahiptir. Bu nedenle, tam yük performansı önemli ölçüde etkilenmez. Motor hız eğrisinin doğası Şekil 6.3 (c) ‘de temsil edilmektedir.
Çift sincap rotor indüksiyon motoru:
Rotor, uç halkalar tarafından kısa devre geçirilen her yarıkta (Şekil 6.3 (b)) iki katlı sürücü çubuğu tabakasından oluşur. Üst çubuk, alttan daha küçük bir enine bölüme sahiptir. Bu nedenle, daha yüksek bir dirence sahiptir.
Alt çubuk, üst çubuktan daha yüksek miktarda sızıntı akışına bağlıdır ve bu nedenle daha yüksek bir endüktansa sahiptir. Rotor frekansının yüksek olduğu düşük hızda, alt çubuk daha yüksek bir empedansa sahiptir. Bu nedenle, üst çubuğu daha fazla geçer.
Üst çubuğun direnci iyi başlangıç performansından elde edildiğinden. Rotor frekansının düşük olduğu yüksek hızlarda, alt çubuk o üstten çok daha küçük bir empedansa sahiptir.
Sonuç olarak, rotor akımı esas olarak alt çubuk tarafından taşınır ve düşük dirençli olduğu için tam yük performansı iyi kalır. Dişli hızı özelliklerinin doğası Şekil 6.3 (c) ‘de temsil edilmektedir.
Tork Motoru:
Uzun süreler boyunca durma veya düşük hızda bir durumda çalışacak şekilde tasarlanmış motorlara tork motorları denir. Düşük hızda düşük hızda istenen torku geliştirmek için tasarlanmıştır.
Hızlı özellikleri, en düşük hızlı yüklerle kararlı çalışma sağlayacak şekilde negatif bir eğime sahip olacak şekilde şekillendirilir. Bir tür sincap veya rotor tipi yara olabilirler. Piphanted indüksiyon motorları ve tek faz motorları mevcuttur.