Üç faz indüksiyon motorunun yapısı:
Bir dönüştürücü oluşturma üç fazlı bir indüksiyon motoru, hatta beslenen bir hatta aşağıdaki avantajlara sahiptir:
1. Çamaşırhane başlangıcı bir alttan değişken bir frekansla garanti edilir
2. Akım ve torkun başlaması ve hızlandırılması mümkündür.
3. Ağ artık kafes üç faz indüksiyon motorlarının yapımındaki doğrudan anahtarda olduğu gibi yüksek bir aşırı gerilim akımına tabi değildir ve bu nedenle özel başlangıç ekipmanı yüksek oranlara bile atlanabilir.
4. Motor boyutuna ihtiyaç duyulmadan birçok atalet anı hızlandırılabilir.
5. Dönüştürücü bir ayrıştırma cihazı görevi görür.
Sonuç olarak, kısa devre noktasındaki motor geri bildirimi, hattın kısa çizgileri, en fazla hizmetin abartılması gereken kısa devre derecesi düşük olduğunda, bir ekonominin yapılmasına izin verdiği zaman gerçekleşmez.
Daha önce belirtildiği gibi, üç faz indüksiyon motorunun inşaat hızı, statora statik frekans dönüştürücüler kullanılarak değişken bir voltaj, değişken frekans güç kaynağı sağlayarak kontrol edilebilir.
Hız kontrolü, rotor devresindeki dönüştürücüler kullanarak güç sistemindeki kayma gücünü besleyerek de mümkündür. Temel olarak, iki farklı hız kontrol yöntemi vardır.
1. Kontrol Kontrolü Eğitimi Stator sabit gerilim, sabit frekanslı borulardan güçlendirildiğinde Slazing Freeding.
2. Değişken bir değişken frekans voltajı kullanarak motor kontrolü, motoru sabit bir rotor frekansında çalıştırın.
Kayma frekansındaki değişime göre hız kontrolü aşağıdaki gibi elde edilir:
1. Üç faz gerginlik kontrolörü kullanarak stator voltaj kontrolü.
2. Rotor devresindeki bir kıyıcı tarafından kontrol edilen bir direnç kullanarak rotor direncinin kontrolü.
3. Vardiyanın enerjisini geri kazanmak için rotor devresinde bir dönüştürücü kaskadını kullanarak.
4. Rotor devresinde bir Cycloconverteur kullanma.
Bir indüksiyon motorunun stator voltaj varyasyonu ile kontrolü (üç faz voltaj kontrolörü kullanarak)
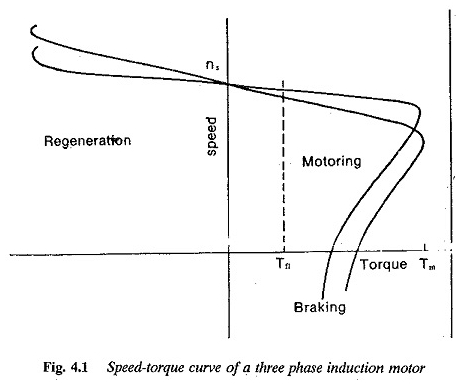
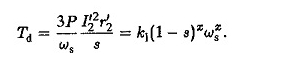
Üç faz indüksiyon motorunun bir yapısının torkunun, gerginliğin karesi ile doğrudan orantılı olarak değiştiği çok iyi bilinmektedir. Bir indüksiyon motorunun torku yaklaşık olarak verilir.

Ve tork hız eğrisi Şekil 4.1’de gösterildiği gibidir. Maksimum tork için kayma 
stator gerginliğinden bağımsızdır. Bununla birlikte, bu rotor direncindeki varyasyon ile değiştirilebilir. Maksimum tork değeri tarafından verilir

Ayrıca uygulanan gerginliğin karesi gibi değişir. Gerilim%80’e düşürülürse, maksimum tork%64’e düşer. Uygulanan voltajdaki varyasyon, bir gerilim kontrolörü vasıtasıyla elde edilir.
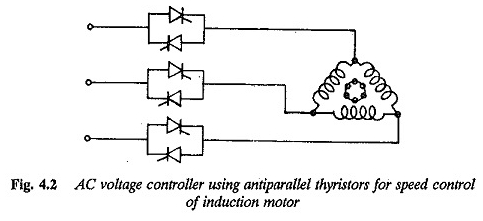
Bir indüksiyon motorunun hızını kontrol etme yöntemi basit ve ekonomiktir. Stator voltaj kontrolü, Şekil 4.2’de belirtildiği gibi bağlanan antiparalel tiristörlerin faz kontrolü vasıtasıyla elde edilir.
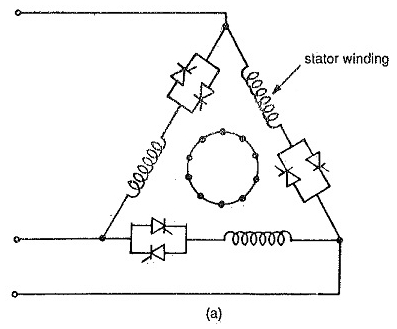
Şekil 4.3 (a) ve (b), üç faz indüksiyonu olan bir motor yapısı sağlayan bir voltaj kontrolörünün iki pratik bağlantısını göstermektedir. Şekil 4.2 ile bağlantılı olarak, tristörler sadece faz akımını yönetmelidir. Harmonik akımlar yükselir. Şekil 4.3’te harmonik ceza oldukça daha fazladır.
Stator voltajı, tetik köşesi aralığında sıfırdan tam değere değişebilir. Çizgi tarafındaki çizgi faktörü, harmonikler ve faz kontrolüne bağlı olarak reaktif güç nedeniyle çok vasattır.
Bir kafes indüksiyon motoru, hız kontrolü için değişken bir voltaj güç kaynağından güçlendirildiğinde, aşağıdaki gözlemler yapılabilir:
1. Maksimum tork noktasının ötesinde tork hızı negatif bir şekle sahiptir. Sabit bir tork yükü için bu bölgedeki kararlı bir çalışma noktası mümkün değildir.
2. Voltaj Kontrolörü, yüksek başlangıcına dayanabilmelidir, hız kontrol aralığı oldukça sınırlıdır.
3. Motor güç faktörü zayıftır.
Yukarıdaki zorlukları önlemek için, üç fazlı indüksiyon motorunun yapımı yüksek dirençli bir rotora sahip olmalıdır. Bu, maksimum tork değişikliği noktasını S = 1’e çıkarır, böylece hız hız eğrisinin kararsız bölgesini azaltır.
Rotor direncindeki artış nedeniyle, başlangıç akımı azalır, güç faktörü gelişir ve hız kontrolü aralığı artar.
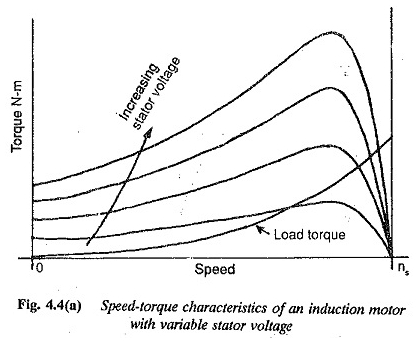
Bu nedenle hız kontrol yöntemi, yüksek dirençli bir rotor ile avantajlıdır. Bu kontrol için tork hız eğrileri Şekil 4.4 (a) ‘da temsil edilmektedir. Denetleyicinin geçerli notu, her hızda olası torku belirler.
Hıza bağlı olarak tork sınırı eğrisi türetilebilir. Şekil 4.4 (b), nominal motor akımının üç katı olan denetleyici tasarım gösterimi için bu sınır tork eğrisini göstermektedir. Statorun hızının ve voltajının bir fonksiyonu olarak akım temsil edilir.
Kontrol sırasında, geçerli değer sınır değerini aşarsa, otomatik akım sınırı kullanılmalıdır. Bununla, çekim açısının değeri, yetkili akım dolaşana kadar ayarlanır.
Yöntem basit ve ekonomik olsa bile, vardiyadaki artışla motor kayıpları artar. Kayıplardaki artış, hava boşluğu akışındaki düşüş ve rotorun yüksek direnci nedeniyle motor akımındaki artışa atfedilebilir.
R1 / R′2 oranı, bu kayıplara karar vermek için temsili olarak kabul edilebilir, çünkü dirençteki artış, çekilen mevcut sınırlamada belirleyicidir. Motor verimliliği yaklaşık olarak verilebilir.
![]()
burada s motorun kaymasıdır.
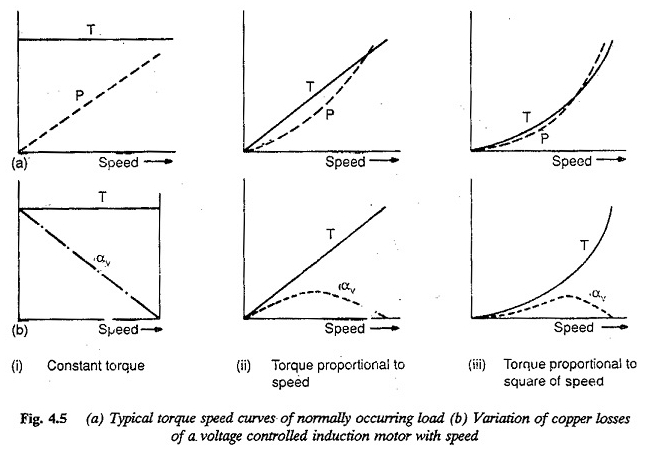
Motor tarafından yönlendirilen yük türü, vardiya değiştikçe çekilen akımı ve motorun kayıplarını etkiler. Normal performans gösteren ücretler
1. Konforlu tork yükleri
2. Torque değişkeni hızla orantılı
3. Totor değişkeni hızın karesi ile orantılı

Yükün yük hızı özelliklerinin genel bir denklemle verildiğini düşünün
![]()
X = 0 değeri ise, sabit bir tork yüküne eşdeğerdir. Değişken tork yükleri için x> 0 (Şekil 4.5a).
Rotor bakır kayıpları
![]()
burada PD1 hava boşluğunun veya rotor besleme girişinin gücüdür.

Ama motorun kayması
ve rotor güç girişi
![]()
Rotora aktarılan maksimum güç değeri
![]()
PD1max raporu olarak ifade edildiğinde bakır kayıpları
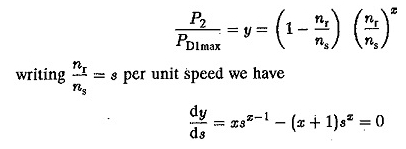
Maksimum olan SAT değeri için. Değeri

Rotor bakır kaybının maksimum değeri için. Rotor bakır kayıplarının maksimum değerleri tarafından verilir

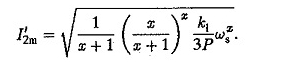
X değeri arttıkça, YM değeri azalır. Rotor akımının maksimum değeri ve meydana geldiği ünite hızı da belirlenebilir. Sahibiz
hangi rotor akımı
![]()
Rotor akımının maksimum değeri için üniter hızla da
![]()
Rotor akımının maksimum değeri,
Özel durumlar için
Kayıplardaki varyasyon, farklı yük türleri için Şekil 4.5 (b) ‘de temsil edilmektedir. Vardiya ile berbat kayıpların artması ve maksimum hale gelmesi nedeniyle sabit tork yükleri tercih edilmez.
Bu, akışın değişiminden açıktır, çünkü voltaj hız kontrolü için değişir. Sabit bir tork korumak için motor ağır bir akım çeker, bu da düşük tork / amper, zayıf verimliliğe ve düşük hızda kötü bir güç faktörüne yol açar.
Tork hızlanma ile doğrudan orantılı olarak değiştiğinde, bakır kayıpları 0,5 Ω hızda maksimum% 25 nominal güce sahiptir.
Hız karesi ile orantılı çiftler için, bakır kayıplarının maksimum olduğu birim hızı 2/3 ve bakır kayıplarının maksimum değeri nominal gücün 0.149’dur.
Hız kontrol yöntemi, torkun hızın karesi ile orantılı olduğu pompa veya fan yükleri için avantajlı bir şekilde kullanılabilir.
Yukarıdaki tartışmadan, bu hız kontrol yöntemi yalnızca aşağıdaki durumlar için uygundur:
1. Hız kontrol süresinin tanımlandığı kısa vadeli işlemler için.
2. Hızlı torkta parabolik veya kübik varyasyonlarla üfleyicilerin veya pompaların hızını kontrol etmek için. Bu, kayıplar ve ısıtma artışı nedeniyle sabit tork yükleri için uygun değildir.
3. Motor hızını normal çalışma altında zayıf verimlilikle kontrol etmek için.
Tahrik motorundaki yük türü (yük hızına bağlı olarak tork) motordaki kayıpları etkiler. İnsinüzoidal giriş dalgaları harmonik kayıpları arttıran -sinusoidal olmayan akımlara neden olur.
Sonuç olarak, toplam kayıplar özellikle düşük hızlarda artar ve bu kayıplar motorun olası daralmasına neden olur veya bu yöntem kullanıldığında aşırı boyutlu bir motor kullanılmalıdır.
T α N2’nin bulunduğu üfleme tipi yükler için, akımın maksimum değeri temel hızın 2/3’ünde gerçekleşir. Bu akım, motorun tam motor yüküne bağlıdır. Büyük kayar motorlar (yüksek dirençli rotorlar) için, nominal akıma maksimum akım azalır.
Sabit tork yükleri için, hızdaki azalma ile güç kayıpları artar ve sıfır hızda maksimum değere ulaşır. T α n yükler için, maksimum 1/2’de meydana gelir, temel hız ve kayıplar statorun gücünün% 25’ine gelir.
Motorda meydana gelen kayıplar, motor sıcaklığındaki artıştan sorumludur. Kayıplar, motorun hala yetkili bir sıcaklık artışı ile çalışması için yetkili değerde tutulmalıdır. Tartışılan farklı yük türleri motor kayıplarını artırma eğilimindedir.
Ek olarak, giriş voltajının dalga formu bozulur. Stator ve rotor akımları zengin harmonik içeriğe sahip -inusoidal değildir. Bu harmonikler ek kayıplara neden olur. Nominal bakır kayıplarının% 50’si olarak kabul edilebilirler.
Büyük vardiyalarla motor kayıplarındaki artış motorun daralmasına yol açar. Normal bir motor 5 ila 6 kez serbest bırakılabilir. Yüksek direnişli rotor kullanılırsa, havadar faktör azalır.
Toplam motor kayıpları

Veya
FV, bozulma nedeniyle kayıplardaki artışla ilgilenir ve normalde 1.5 olarak kabul edilir.
PR, motorun derecesidir
K1PR, motorun bakır kaybının toplamıdır.
Yetkili sıcaklıktaki artışı sürdürmek için, yetkilendirilen kayıplar

Veya
η Motor verimliliğidir
αV, kayıpların kayıpları not etmek için minimum hızda ilişkisidir. hız.
Motorun PTVP değerlendirmesi.
ΑV faktörü, kullanılan yük türüne bağlıdır. Makineler zorla soğutulur, 1.0 ve hızdan bağımsızdır. Makine otomatik olarak arındırılırsa, hıza bağlıdır. Hızın alt sınırı azaldıkça bu değer azalır.
İki kutuplu bir makine için tipik bir karakteristik Şekil 4.5 (c) ‘de temsil edilmektedir. Daraşma, motorun verimliliğinden de etkilenir. Verimlilik azaldıkça 1-η / η artar. Büyük rotorun bu tür hız kontrol motoru için 17 direnç kullanılır. Verimliliğe sahipler. Bu nedenle, motor daralması azalır.

Yukarıdaki tartışma, belirli bir motorun farklı yük türlerine neden olduğunda farklı şekilde çarpıtıldığını açıkça göstermektedir.
Başka bir deyişle, yükün gerektirdiği güç sabittir, tahrik motoru, yükün farklı yük hızı eğrileri için farklı boyutlar olmalıdır, örneklere bağlı olarak örnektir.