Üç faz indüksiyon motorunun özellikleri:
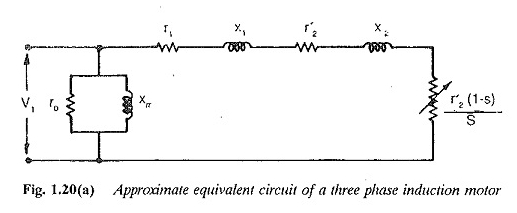
Üç faz indüksiyon motorunun performans özellikleri, Şekil 1.20 (a) ‘da gösterilen yaklaşık eşdeğer devre kullanılarak türetilebilir. Devrede

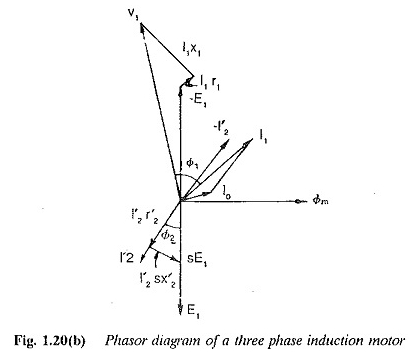
Motor faz diyagramı Şekil 1.20 (b) ‘de gösterilmiştir.
Bir indüksiyon motorunda, rotora (PD) aktarılan güç, rotorun bakır kaybı (PCU2) ve gelişmiş mekanik güç (PM) 1: s: (1 – s) oranındadır. Motor tarafından geliştirilen tork

Ancak PM ilişkileri = PD (LS) ve NR = NS (LS) kullanarak,
![]()
Daha fazla -derinlikte kullanım 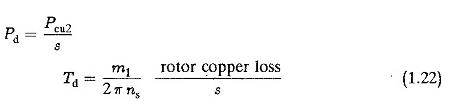
Eşdeğer devrenin

Gelişmiş çift bu nedenle

Çok küçük brifingler (motor işletim bölgesi)
ve R′2 / S≫r1

Bu, gelişmiş torkun kayma ile doğru orantılı olduğunu gösterir. Aynı şekilde, önemli değişimlerle, çift vardiya ile ters oranda değişir. Ara vardiyalarda, gelişmiş çift hesaplanmalıdır. Hız torkunun (kayma) özelliği Şekil 1.21’de temsil edilmektedir.
Karakteristik eğilimden, tork için maksimum bir değer olduğunu görebiliriz. Bu maksimum torkun gerçekleştirildiği değişim

Maksimum tork

Bazen statorun empedansı ihmal edilir veya motoru tüm slaytlara sabit bir akışa kadar çalıştırmak için stator empedans düşüşü dengelenir. Uygulanan voltaj, indüklenen gerilim olacak şekilde arttırılır. E1 / F sabittir (nominal voltajdaki değere eşit).
Uygulanan voltaj, E1 / F gibi frekansa bağlı olarak değişir. Stator’un empedansının sıfır olduğu varsayılabilir çünkü hiçbir etkisi yoktur. Böyle bir durumda ilişkiler


“Bu durum için anahtar hız eğrisi de Şekil 1.21’de temsil edilmektedir.
Tipik bir hız hız eğrisinin aşağıdaki özelliklerine dikkat edin (Şekil 1.21):
- Tam olarak senkron hızda S = 0, geliştirilen tork sıfırdır (TD = 0). Bu beklenebilir, çünkü sıfır nispi hızından dolayı indüklenmiş akımlar yoktur.
- Tam yük çift nominal kaymaya karşılık gelir.
- TDM, SM (T) slipindeki maksimum torktur
- TST, S = 1’deki başlangıç torkudur.
Maksimum tork fraksiyonunda ifade edilen herhangi bir kayarda geliştirilen çift,

burada a = r1 / r′2. Stator R1’in direnci ihmal edildiğinde

Motorun kayar aralığında 0 – SM sabittir. Motor bu plajda çalıştığında, hız veya tork değiştirerek çalışma noktasında herhangi bir rahatsızlık itfa edilir ve motor orijinal çalışma noktasına geri döner veya yeni birine ulaşır. Kararlı çalışma için, hız düştüğünde gelişmiş tork artmalıdır, yani,
Motorun SM Plajı’nda çalışması. dengesiz / kararsız. Bu plajda, eğri pozitif bir DTD / DNS’ye sahiptir, yani hız düştüğünde tork azalır.
Karakteristik, çok küçük slaytlarla (kararlı çalışma bölgesinde) neredeyse doğrusaldır. Bu doğrusallık, sabit bir akışla çalışma durumu için rüptür torku noktasına kadar devam eder. Şekil 1.21’deki resimli özellikler aynı şekilde yeniden tasarlanmıştır.
Ünite -up değişimleri için işlem dördüncü çeyrekte. Rotorun ve döner manyetik alanın dönüşü zıt yöndedir. Geliştirilen tork, motoru durdurmaya çalışan bir fren torkudur. Bu iki şekilde olabilir:
- Motor beslemesinin faz dizisi yarış sırasında tersine çevrilir.
- Ağaca negatif tork uygulanır.
Motor, yükü düşürürken yükü sabit hızda sürmesi için kayar aralığında (s> 1) bir fren gibi çalışır. Çift pozitifken, rotasyonun yönü tersine çevrilir.
Rotorun uygun bir direnci ile, çalışma noktası çalışma çeyreğine taşınır, böylece yük sabit hızda düşürülür.
Tork hız eğrisi, dönmeden önce yönde negatif bir torku temsil ederek ikinci çeyreğe uzanır. Bu, hızı

Rotor senkron hızdan daha yüksektir. Senkron hızın ötesinde hızlanma eğilimi bir nesil torkla durdurulur. Bu çalışma modunda, hız artışına bağlı tüm kinetik enerji sektöre iade edilir. Maksimum tork (ayrışma) aşağıdakilere bağlıdır:
- Uygulanan gerginliğin karesi olarak değişir.
- Stator’un empedansı ile azalır.
- Değeri rotor direncinden bağımsızdır.
- Rotor sızıntılarının reaktansındaki artışla değeri azalır.