Üç faz indüksiyon motorunun parça odaklı kontrolü:
Bir indüksiyon motorunun stator akımı, gerekli hava boşluğu akışının (mıknatıslanma) üretim fonksiyonlarına sahiptir ve yüke neden olmak için gerekli torku geliştirir.
Stator akım bileşenleri (akış üretimi ve tork üretimi) ayrı ayrı kontrol edilebiliyorsa, üç faz indüksiyon motorunun kontrollü bir kontrolü, sürekli bir akım motoruna benzer şekilde çalışacaktır.
Bu tür kontrol, tork ve akışın sırasıyla takviye ve saha akımını değiştirerek ayrı ayrı ve bağımsız olarak kontrol edilebildiği uyarılmış bir CC motorunda mümkündür.
Aralarında doğal bir ayrıştırma olurdu, ancak takviyenin reaksiyonunun etkileri için. Bu etkiler takviye tazminatı ile ortadan kaldırılabilir. Ayrı olarak ödenen heyecanlı bir CC motorunda mükemmel bir ayrışma elde edilebilir.
Bu çok yönlü kontrol, sürekli bir akım motoruna çok iyi dinamik davranış sağlar. Böylece, stator akım bileşenlerini ayırmaya çalışarak üç faz indüksiyonlu motor kontrolü kullanılarak yüksek performanslı bir sürücü elde edilir.
Bu ilkeye, alanın oryantasyonunun kontrolü veya vektörün kontrolü denir. Bu kontrol dinamik davranışı geliştirir ve çok iyi performans eğitimi düşük hızda bile elde edilebilir.
Akımın iki bileşeni tanımlanır ve akış vektörüne kıyasla dik emirlere uygun şekilde yönlendirilirler.
Mevcut bileşenler, üç akıştan birine göre, yani stator akışı, hava boşluğu akışı veya rotor akışı ile yönlendirilebilir.
Analiz, oryantasyon stator veya hava boşluğu akışına kıyasla gerçekleştirilirse okuyucunun dinamik performansının istenen seviyede olmadığını göstermektedir. Bu dinamik kötü davranış, vardiyayı takip ederek çiftin gecikmesinden kaynaklanıyor.
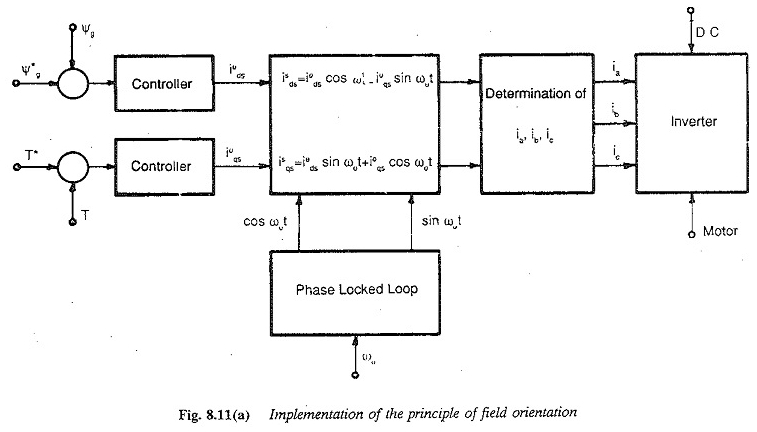
Oryantasyon rotor akışına kıyasla gerçekleştirilirse, doğal ve etkili bir ayrışma mümkündür, bu da çok hızlı bir tepki ile sürüşün yüksek performanslı bir tork kontrolüne yol açar. Yerde yönlendirme ilkesinin uygulanması Şekil 8.11’de gösterilmiştir.
 Alan yönelimi ilkesi önerildiğinde, endüstrinin dikkatini çekmedi ve karmaşık ekipman nedeniyle çok popüler değildi. LSI aracılığıyla dijital bileşenler ve mikroişlemcilerdeki gelişmeler ve bileşenlerin minyatürleştirilmesiyle, üç faz indüksiyon motorunun kontrolünün bu yüksek performans kontrolü popüler hale gelir. Ana uygulama alanı ve yüksek hızlı mikroişlemcilerin etkili kullanımı, üç faz indüksiyon motorunda kontrollü kontrolün vektör kontrolüdür. Bu kontrol gerektirir
Alan yönelimi ilkesi önerildiğinde, endüstrinin dikkatini çekmedi ve karmaşık ekipman nedeniyle çok popüler değildi. LSI aracılığıyla dijital bileşenler ve mikroişlemcilerdeki gelişmeler ve bileşenlerin minyatürleştirilmesiyle, üç faz indüksiyon motorunun kontrolünün bu yüksek performans kontrolü popüler hale gelir. Ana uygulama alanı ve yüksek hızlı mikroişlemcilerin etkili kullanımı, üç faz indüksiyon motorunda kontrollü kontrolün vektör kontrolüdür. Bu kontrol gerektirir
- Rotor akışı hakkında kesin bilgi.
- Referansın bir fonksiyonu olarak stator akım bileşenlerinin kesin ayarlanması.
İndüksiyon motorunun vektör kontrolündeki bir mikroişlemcinin işlevleri aşağıdaki gibidir:
- Rotorun hızını ve ayrıca rotorun açısını belirlemek için ağaç kodlayıcıdan elde edilen sinyallerin tedavisi. Bu rotor açısı bir çerçeveden diğerine dönüşümlerde kullanılmalıdır.
- Makine modellerinden birine bağlı olarak terminal voltajları, akımlar ve hız kullanan akış tahmini.
- Fazla ilgili hesaplamalar ve akımın iki bileşenini tanımlamak için dönüşümleri koordine eder. Gerekli kontrolden sonra, bu bileşenler gerçek faz akımlarıyla karşılaştırmak için referans değerleri sağlamak üzere dönüştürülmelidir.
- Geribildirim kontrolünde hız ve akım döngüleri. Bu döngülerde kontrolörlerin uygulanması.
- Makine tarafı dönüştürücü ve çizgi tarafı için ızgara sinyalleri üretmek için, makine tarafı dönüştürücü frekansa karar verirken, çizgi tarafı akım / voltaja karar verir. Lateral çizgi dönüştürücüye çekim sinyalleri, bir çift dönüştürücü için tarif edilenle aynı şekilde elde edilir. Makine tarafı dönüştürücüsüne atış sinyalleri frekansa karar verir. İnvertör çıkışının frekansına karar vermek için kayar kontrolörün çıkışına üç faz indüksiyon motoru alanına yönelik kontrol hızı eklenir. Ekleme kesin olmalıdır, çünkü küçük bir miktarda büyük bir miktar eklenir. Bir mikroişlemciye dijital ekleme kesindir. Bu nedenle mikroişlemci, makine yan dönüştürücüsüne atış sinyalleri sağlayabilmeli veya üretebilmelidir.
- Verilerin Alımı Mikroişlemcinin dijital biçimde geri bildirim sinyalleri alması gerekir. İşlemciye veri aktarımı gereklidir. İşlemci ve işlemciden bir veri akışı gereklidir.
- Doğrusal fonksiyonların sınırlandırılması Kontrol davranışında kullanılan kontrol değişkenlerinin yanı sıra süreksiz iletim sırasında dönüştürücünün doğrusal olmayan davranışı. Alanın süreksiz iletim modları ve zayıflama sırasında değişken kazanç telafisi.
Matematiksel operasyonlar çarpma, bölünme, toplama ve çıkarmayı içerir. Mikroişlemci aritmetik işleme ünitesi bu işlemleri gerçekleştirebilmelidir.
Akış tahmini, iyi bilinen Simpson kuralı veya trapezoidal kural kullanılarak dijital entegrasyon ile gerçekleştirilebilir. Ancak sonuçlar, sekiz Bit işlemcideki kesik hataları nedeniyle hassasiyet kaybından muzdariptir. Bu hatalar operasyonların istikrarsızlığına yol açar.
Çift hassasiyetle yüzen komutu kullanın işlemci performansını iyileştirir. Ancak, bu uzun bir hesaplama dönemi gerektirir. Mikroişlemci yükünü azaltmak için, akış tahmini işlemcinin dışındaki analog modeller tarafından taşınabilir.
Hesaplanan akış işlemcide işlenebilir. Akımların ve akışların referans değerleri işlemci tarafından geliştirilir.
İşlemcinin hızına ve yukarıdaki işlevleri yerine getirme yeteneğine bağlı olarak, işlevleri yerine getirmek için yerel ekipman ve mikroişlemci arasında bir sınır oluşturulabilir.
Bazen, çok işleyici kontrolü, gereken kontrolün hızına ve kalitesine bağlı olarak gerçekleştirilebilir.
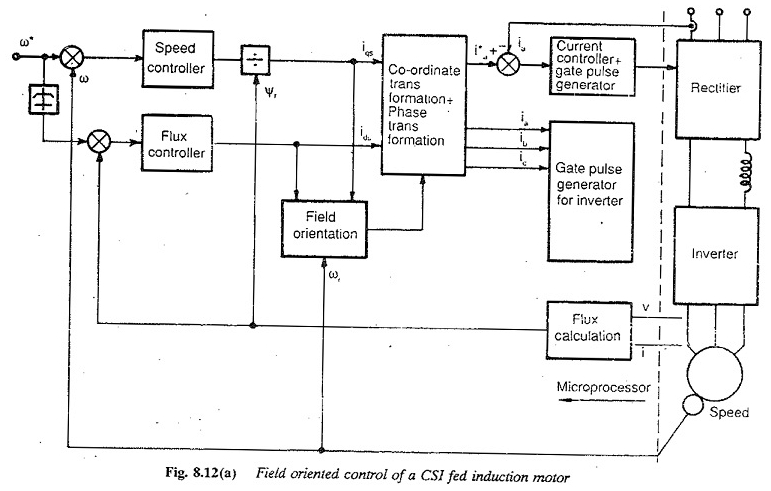
Voltaj kaynağı invertör ile birlikte, üç faz indüksiyon motorunun alanı tarafından sağlanan geçerli kaynağın mevcut kaynağının kontrolü ile yerdeki yönelim mümkündür. Mevcut kaynak invertör, güç devresinin sadeliği nedeniyle yaygın olarak kullanılmaktadır.
CSI kullanılarak kontrol odaklı kontrolün özellikleri burada tartışılmaktadır (8.12 (a)). Bazen bir PWM invertör referans akımları sağlamak için uygun şekilde kontrol edilebilir (Şekil 8.12 (b)). Bu kontrol bir mikroişlemci kullanılarak gerçekleştirilebilir.

Akış doğrudan araştırma bobinleri veya salon probları kullanılarak ölçülebilir. Analog sinyaller, sonraki tedavi için mikroişlemcide kendini beslemek için dijitale dönüştürülür.
Bu doğrudan önlem, teorik olarak kesin olsa bile, aşağıdaki sınırlamalara veya zorluklara sahiptir: hassas oda problarının veya arama bobinlerinin varlığı, indüksiyon motorunu daha hassas hale getirir, ancak doğal sağlamlığı kaybolur.
Ölçülen sinyal, filtreleme gerektiren yarık harmonikler tarafından üst üste bindirilir. Ölçme ve dönüşüm hatalarının sonuçları çok güvenilir hale getirmemesine yardımcı olur. Bu nedenle, normal olarak, makine modelleri kullanılarak FLWC hesaplaması kullanılır (dolaylı tahmin).
Akışı hesaplamak için bu makine modelleri, rotor testlerinden yük ve bloke edilmeden belirlenen üç faz indüksiyon motoru parametrelerinin zeminine yönelik kontrolü kullanın. Yanlışlık; Parametrelerin tahminindeki modeller arasında makinenin varyasyonu!
Sıcaklık ve doygunluğa bağlı parametreler tahminde tam olarak dikkate alınmalıdır. Tahmine dahil olan entegrasyon durumunda hassasiyet değiştirilir. Bu, hesaplamada voltaj ve hız kullanılırsa olur.
Düşük hızda, entegrasyon bu hatalarda önemli hatalar getirir ve durmada çok çeşitli duraklarda güvenilir performans yapılabilir.
Performansı artırmak için, modelde kullanılan makine ayarları mümkün olduğunca kesin olmalıdır. Aksi takdirde, tam bir bağlantının mümkün olması için bir düzeltme işlemi kullanılarak düzeltilebilirler. Düzeltme işlemi parametreyi geliştirir.
Dolaylı akışın tahmin edilmesi ve parametreler olarak bilinen tanımlama veya adaptasyon, mükemmel bağlantılı bir indüksiyon motoru elde etmek için kullanılır.
Akımın ve hızın parametreleriyle gerçek tespit edilen değişkenlerinden tahmini akış, referans değeri (referans miktarlarından belirlenir) ile karşılaştırılır. Fark, hesaplamalara giren makinenin parametrelerini düzeltmek için kullanılır.
En etkili parametre rotor direnci veya rotor zaman sabitidir ve akışın gerekli değeri model tarafından verilene kadar düzeltilir.
Parametrelerin uyarlanmasıyla alan odaklı kontrol için tek çözüm mikroişlemcilerin veya mikrobilgisayarların kullanılmasıdır. Parametreleri uyarlamak için literatürde çeşitli teknikler mevcuttur. Böyle bir diyagram Şekil 8.13’te gösterilmiştir.
Mikroişlemci, hem referans değerlerin hem de ölçülen değişkenlerin akışını tahmin etmek için matematiksel işlemler yapmalıdır.

Yukarıdaki uygulama için bir mikroişlemci seçmek aşağıdaki hususlara dayanabilir:
- Fazda Kontrollü Doğrultucu Ödülü’nün çözünürlüğü. Çözüm, çekimde asimetriye karar verir.
- Gerçekleştirilebilen matematiksel işlemler. Çarpma ve bölünme dahil olmak üzere ikili ve ondalık aritmetik yapabilmelidir
- Gerekli bellek kapasitesi
- Dahili saat üretimi
- Denetleyicilerin, sınırlıların vb. Uygulanması için yazılım yönetimi vb.
- Kesinti kapasitesi
İndüksiyon motorlarının kontrolünde bir mikroişlemcinin diğer bazı uygulamaları şunlardır:
- Bir voltaj denetleyicisi kullanarak hız hızını korumak için bir mikroişlemci kullanılabilir
- Kayan enerji geri kazanım şemasını kullanarak hızı kontrol etmek için kullanılabilir. Verctors kontrolü burada da kullanılabilir.
- Fed CSI eğitiminde akış ve tork kontrolü olan kontrollü kontrollü okuyucu için kullanılabilir.
- Hem VSI hem de CSI indüksiyon motorlarında gerginliği ve harmonikleri kontrol etmek için PWM tekniklerini uygulamak için kullanılabilir.
- Cycloconverteur’u kontrol etmek için kullanılabilir.