Üçlü İndüksiyon Motor Hızı Kontrolü:
Özellikle üç faz indüksiyonlu motor hızını kontrol etme sorunu büyük pratik öneme sahiptir.
Bir dizi endüstride, motorlar hem kontrolün aralığı hem de tatlılığı ve ayrıca ekonomik işlevsellik açısından çok katı karakteristik gereksinimleri karşılamalıdır.
Bakış açısından, üç faz indüksiyon motorunun özelliklerinin hızına bakıldığında, indüksiyon motorları DC motorlarından daha düşüktür.
Bir şönt CC motorunun hızı, iyi verimlilik ve iyi hız düzenlemesi ile geniş bir aralık arasında ayarlanabilir, ancak indüksiyon motorlarında, verimlilik ve iyi hız düzenlemesini kaybetmeden hız değiştirilemez.
Bir indüksiyon motorunun hızı ifade ile verilir

Dolayısıyla, üç faktör vardır: f güç frekansı f, ple pôles p sayısı ve bir indüksiyon motorunun hızının bağlı olduğu slissement s. Bu nedenle, bir indüksiyon motorunun hızını değiştirmek için, yukarıdaki üç faktörden en az birini değiştirmek önemlidir.
Üç faz indüksiyon motoru hız kontrol yöntemleri, motordaki ana etkiye bağlı olarak ayırt edilir: (i) stator tarafında ve (ii) rotorun yan tarafında.
Stator tarafındaki üç faz indüksiyon motorunun hızını kontrol etmek için çeşitli yöntemler (a) besleme frekansındaki değişim (b) uygulanan voltajın değişimi ve (c) kutup sayısını değiştirerek.
Rotorun yanında, hız (a) rotor devresindeki direnci değiştirerek ve (b) rotor devresine rotorun temel EMF’si ile aynı frekanslı ek bir EMF ekleyerek kontrol edilebilir.
Bu en son üç faz indüksiyon motor kontrol yöntemi için, bu makinelerin ek bir elektrik makinesi veya daha fazlası gereklidir.
Düzenlenmiş bir indüksiyon motorundan ve elektrik veya mekanik olarak kendisine bağlanan bir veya daha fazla ek elektrik makinesinden oluşan bir set, kaskad olarak adlandırılır. Anahtar makineleri genellikle ek makineler olarak kullanılır.
1. Arz frekansındaki değişime göre hız kontrolü
Bu üç faz indüksiyon motor kontrol yöntemi, bu plaj boyunca hızda aşamalı bir varyasyon içeren geniş bir hız kontrol aralığı sağlar. Bu yöntemin ana zorluğu, diyetin değişken frekansta nasıl elde edileceğidir.
Bu amaç için gerekli olan yardımcı ekipman, yüksek bir ilk maliyete, artan bakım ve genel verimliliğe düşmeye yol açar. Bu nedenle, bu yöntem genel kullanım için hız kontrol uygulamaları için kullanılmaz.
Bu diyagramın karmaşık olmasına rağmen, geniş hız aralığının ve iyi hız düzenlemesinin kalıcı olarak çok arzu edildiği bazı uygulamalar vardır.
Bir indüksiyon motoru, pratik olarak sabit verimlilik, güç faktörü, aşırı yük kapasitesi ve sabit bir mutlak kayma değerleri ile farklı frekanslarda çalışmalısa, doymamış demir ile, besleme voltajının güç kaynağı frekansı ile orantılı olarak değişmesi esastır.
Bu tür bir varyasyon, örneğin, güç jeneratörü, anlık aşırı yükler veya önemli hız düzenlemesi nedeniyle hız varyasyonlarına tabi ise ortaya çıkabilir. Voltaj ve çıkış frekansı, otomatik düzeltme yapılmadıysa her ikisi de hız olarak değişir.
Bazı büyük deniz eğitiminde, pervanenin motorları indüksiyon tipindedir ve değişken hızda türbinlerle birleştirilmiş senkron jeneratörler tarafından sağlanan bu tür yerel bir güç kaynağından hızla kontrol edilir.
Bu gibi durumlarda bile, hız varyasyonu aralığı sınırlıdır, çünkü ana motorların etkinliği, tasarlandıklarına kıyasla hız değişimiyle hızlı bir şekilde düşer.
Dört farklı frekans için tipik hız hız eğrileri Şekil 1.25’te temsil edilmektedir.

2. Besleme voltajındaki değişime göre hız kontrolü
Değişken sabit frekans besleme voltajına sahip kayan bir kontrol yöntemidir. İndüksiyon motorlarının hızını kontrol etme yönteminde, statora uygulanan voltaj, hızı değiştirecek şekilde değişir.
Üç faz indüksiyon motorunun bu hız kontrolü yöntemi basittir, birinci maliyet olarak düşüktür ve uzun bakım maliyetine sahiptir, çünkü nominal voltajı aşan voltajlardaki işlem manyetik doygunluk, (iii) büyük bir voltaj (iii), geliştirilen torkta büyük bir değişiklik, besleme voltajındaki azalma ve motorun çekilmesine indirgenmesi durumunda azalır ve motoru aşırıya geçerse, motorun çekilmesi, motoru aşırıya geçerse, motoru aşırıya geçerse, motorun çekilmesi, motorun çekilmesi ile azalır. (İv) Hız kontrol aralığı aşağı yönde çok sınırlıdır, yani düşük hızlarda nominal hız.
Genel olarak, bu üç faz indüksiyon motor kontrol yöntemi, fanlara liderlik eden küçük sincap kafes motorlarında olduğu gibi, sadece gerekli torkun hız azaldıkça önemli ölçüde düştüğü yüklerde kullanılır.
Değişken voltaj, kayma değişimi olan doymuş reaktörler, varyaklar veya transformatörler aracılığıyla elde edilebilir.
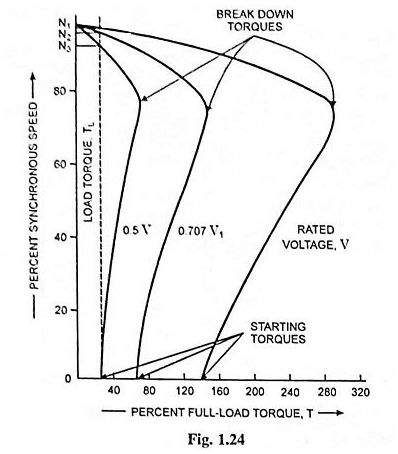
Azaltılmış voltajlarla hızlanmanın özellikleri Şekil 1.24’te gösterilmiştir.
3. Kutup sayısını değiştirerek hız kontrolü
Bu yöntem sincap kafes motorları için kolayca uygulanabilir, çünkü bir kafes sargısı stator ile aynı sayıda kutup oluşturmak için otomatik olarak reaksiyona girer.
Bu üç faz indüksiyon motor kontrol yöntemi, bu makinelerde olduğu gibi yaraların kök motorları ile genellikle mümkün değildir, bu yöntem önemli tasarım ve anahtarlama komplikasyonlarını içerecektir, çünkü birincil ve ikincil bağlantılar aynı anda iki sargıda aynı sayıda kutup üretecek şekilde değiştirilmelidir. Aksi takdirde, bazı rotor sürücü kayışları tarafından negatif bir çift geliştirilecektir.
Statordaki kutup çiftlerinin sayısı aşağıdaki gibi değiştirilebilir:
(a) Birkaç stator sargısı kullanılarak: Bu üç faz indüksiyon motor kontrol yönteminde, farklı sayıda kutup için her yaralanma olan iki veya daha fazla bağımsız sargı aynı slot makinelerine yerleştirilir. Stator sarma direklerinin sayısı şu
Hiçbir durumda birbirine bağımlı olarak bağlantılı olarak bağlantılıdır ve bu motorun çalışma koşullarına göre keyfi olarak seçilemez.
Örneğin, iki hızlı bir motor iki stator sargısı, 4 direk yaralanması ve 6 kutup için bir diğeri ise 1.500 rpm ve 50 Hz güç frekansına sahip 1000 rpm senkron hızlar verecek.
Dört bağımsız stator sargısı olan motorlar da bazen kullanılır ve dört senkron hız verir (ve dolayısıyla çalışır). Tabii ki, bir sarma aynı anda kullanılır, diğerleri tamamen etkisizdir.
Bir hızdan diğerine geçiş mekanik bir anahtar veya kontaktörler tarafından gerçekleştirilebilir. Böyle bir düzenleme ile, kullanmayan / kullanılmayan sarma veya sargılar anahtar tarafından açık tutulmalı veya en azından bir yıldızda bırakılmalıdır.
Aksi takdirde, transformatörün etkisi nedeniyle, gıdaya bağlanan sarma aktif olmayan sargedeki gerilimleri indükleyecek ve aşağıdaki dolaşım akımları nedeniyle aşırı ısınmaya neden olacaktır.
Düzenlemenin kendisi, motorun hızının adımlarla değiştirilmesine eşdeğerdir, çünkü statorun bir veya diğer sargısı güç sektörüne bağlanır.
Her değişiklikle, motor esasen kalkış koşullarına benzer koşullar altında, yani önemli bir akım ve azaltılmış bir tork. Etkin olmayan sürücüler nedeniyle, bu yazı değişimi yöntemi, aynı nota tek bir hızda bir motorun büyük bir stator gerektirir.
Bu yöntem asansör motorları, çekiş motorları ve ayrıca küçük motorların takım tezgahlarını tahrik etmek için kullanıldı.
(b) Önemli kutup yöntemi: Yukarıda (a) yani, çoklu statörü sarma yöntemi sadece küçük motorlarda kullanılır.
Büyük motorlarda, stator merkezlerinin sayısını değiştirmek için birkaç stator sargısına sahip olma ihtiyacını ortadan kaldıran önemli bir kutup tekniği kullanmak daha uygundur.
Bu üç faz indüksiyon motor kontrol yöntemi, her hız için tüm sargıyı kullanır. Normalde, tek hızlı bir motor için, ardışık bobin grupları art arda zıt polarite merkezleri oluşturmak için toparlar. Bu, dört kişilik bir sargının fazının geliştirildiği Şekil 1.83’te gösterilmiştir.
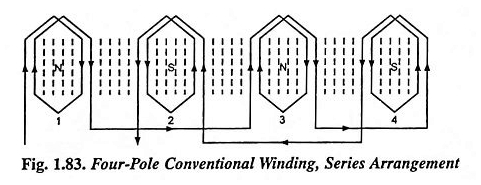
Tüm bobinlerin seri olduğu, ancak son bağlantıların alternatif gruplara, yani Grup 3’teki Grup 1 ve Grup 2’de Grup 4’e kurulduğuna dikkat edilmelidir.
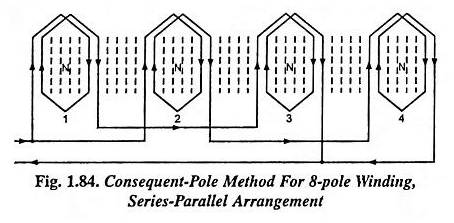
Şimdi, aynı bobinlere sahip grupların son bağlantıları, Şekil 1.84’te gösterildiği gibi, aynı polaritede ardışık bobinlere sahip olacak şekilde değiştirilebilir.
Bu grup 1-3 ile 2-4 gruplarının seri bağlantılarına paralel olarak, grup 2 ve 4’ün polaritesi değişti, böylece şimdi birbirini izleyen dört kuzey kutupları var.
Bu güney kutuplarının bir sonucu olarak her bir kuzey kutupları arasında oluşturulur ve motor artık 8 tabanlı bir sargıya sahiptir.
Böylece, 50 Hz güç kaynağı için, serinin düzenlenmesi 1.500 rpm’lik bir senkron hız verirken, Parral Serisinin düzenlenmesi 750 rpm’lik bir senkron hız verir.
Ayrıca 4 tabanlı sarma için bir seri paralel düzenleme kullanmak, daha sonra 8 -tabanlı sarma için seride hareket etmek de mümkündür. Post 2 ila 4’lük sargının üç fazlı sargısını değiştirmek için bir devre Şekil 1.85’te gösterilmiştir.
Stator, tüm bobin gruplarını aynı polarite için yeniden bağlayarak, kutup gruplarından iki kat daha fazla kutup varmış gibi davranır. Bu şekilde oluşturulan ek kutuplara önemli kutuplar denir ve sarma ardışık bir sarma sonrası olarak bilinir.
Tek bir anahtarlama düzenlemesi ile, bir çift lansman anahtarının bir tarafında standart (veya geleneksel) bağlantıya ve anahtarın diğer tarafındaki önemli yazının bağlantısına sahip olmak mümkündür.
Böylece, iki hız elde edilebilir, geleneksel bağlantı ile daha yüksek hız ve kutupla önemli bir bağlantı ile yarım baskı.

Hız kontrolü için önemli kutup tekniği kullanan motorlarda, mümkün olan en iyi tasarım genellikle her iki hızda da elde edilmez.
Başka bir deyişle, yüksek güç faktörü gibi arzu edilen özellikler bir hızda feda edilir, böylece diğer hızda makul derecede iyi bir güç faktörü elde edilir.
Bazen stator bağlantıları Delta’dan Star’a gitti ve post bağlantıları değiştirildiğinde. Bu voltajı değiştirir ve her hızda daha iyi bir motoru mümkün kılar.
İki hız motoru genellikle stator üzerinde bir sargı ile üretilir, kutup sayısı 1: 2 oranında değiştirilir. Üç ve dört hızlı motorlara istatistiklerde iki sargı sağlanır, bir veya her ikisi de kutup sayısı değiştirilerek üretilir.
Örneğin, dört senkron hız için bir motor elde etmek istenirse; 1500, 1.000, 750 ve 500 rpm, Stator’a iki sarma yerleştirilmelidir, bunlardan biri 4 ve 8 direk verir, diğeri 6 ve 12 kutup veren.
Bireysel faz grubunda bir dizi paralel bağlantı kullanarak, fazlar yıldız / delta’ya bağlanabilir, bu da üç tip tork hızı özelliği, yani sabit tork, sabit güç ve değişken torkla iki vitesli çalışmaya yol açar.
Stator sargısının tasarımındaki ve değiştirilmesindeki komplikasyonlar nedeniyle, bu hız kontrol yöntemi sayesinde herhangi bir motor için dörtten fazla hız elde etmek mümkün değildir. Bu yöntem aynı zamanda ilerici hız kontrolü sağlamaz.
Bu nedenle, bu yöntem genel kullanım için hız kontrol uygulamaları için kullanılmaz.
Bununla birlikte, bu yöntem havalandırma fanları, konveyörler, araç tezgahları veya sağlayacağı yaklaşık iki veya dört sabit çalışma gerektiren diğer uygulamalar gibi uygulamalar için çok tatmin edicidir.
Bu yöntem, sadelik, her ayar için iyi hız düzenlemesi, yüksek verimlilik ve ılımlı başlangıç maliyeti ve bakım avantajına sahiptir.
Stator üzerindeki kutup çiftlerinin sayısı, kutupların genlik modülasyon tekniği kullanılarak da değiştirilebilir – çıkarılan portik tutucuların modülasyonu tekniği.
Post değişim yöntemi, mevcut iki hızın oranının, önemli kutup yönteminde olduğu gibi mutlaka 2: 1 olması gerekmemesi avantajına sahiptir.
4. Stator empedans kontrolü
Makine terminallerinde azaltılmış bir voltaj, her bir stator teline seri olarak dengeli direnç veya endüktans yerleştirilerek elde edilebilir. Bu koşullar altında, motor terminal voltajı motor akımına bağlı hale gelir ve voltaj motorun hızlanmasıyla değişir. Tipik hızda torkun özellikleri Şekil 1.86’da gösterilmektedir.
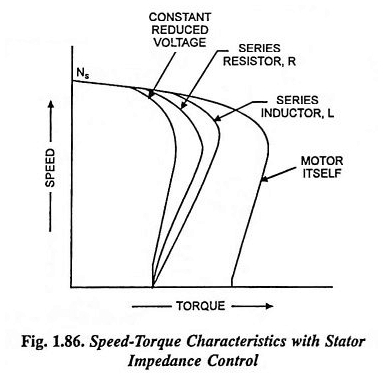
Empedans (R veya X) aynı başlangıç torkunu sağlayacak şekilde ayarlanırsa, endüktans ilavesi durumunda civciv hızının özelliği ek dirençten daha büyük bir tork olacaktır.
Buna ek olarak, bu iki özellik, aynı başlangıç torku için, uygulanan voltaj azaltılmış bir karakteristik ile elde edilenlerden daha büyük çiftlere sahip olmamızı sağlar.
Stator devresine direnç eklenmesi güç faktörünü iyileştirir, ancak daha fazla enerji kayıpları fiyatına göre.
5. Rotor direncinde (veya rotor direnç kontrolünde) değişime göre hız kontrolü
Yaraların kök motorları, genellikle motor hızlandıkça aşamalarda kısa devre olan ikincil devredeki başlangıç dirençlerinin bağlantısı ile başlatılır.
Bu dirençlerin ohmik değerleri uygun şekilde seçilirse ve bu dirençler sürekli çalışma için tasarlanmışsa, hızı başlatmak ve kontrol etmek için çift hedef için kullanılabilir. Ayrıca, bu yöntem tek başına sarılmış rotor motorlara uygulanabilir.
Hız kontrolünün yumuşaklığı, mevcut dirençlerin aşamalarının sayısına bağlıdır. Kontrol, temel hızda aşağı yönde sağlanır. Hız kontrol aralığı sabit değildir ve yükün değerine bağlıdır.
Bu hız kontrol yöntemi, çerçeve ile seri direnç vasıtasıyla Shunt DC motor hızına benzer özelliklere sahiptir. Ana dezavantajları, düşük hız ayarlarına karşı rotor direncindeki artış nedeniyle daha düşük verimlilik ve düşük hız düzenlemesidir.
Örneğin, senkron hızın% 50’sinde, rotorun etkinliği sadece% 50’dir ve motorun verimliliği biraz daha az olacaktır. Hız varyasyonu sadece% 50 ila 100 aralığıyla sınırlıdır.
Sıvı reostatlar metalik reostatlara tercih edilir, çünkü endüktansları yoktur ve dirençler tek tip bir tork vererek hafifçe kesilebilir.
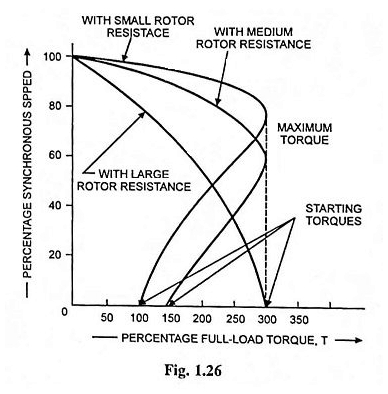
Bir indüksiyon motorunun rotor devresinde dış dirençlerin kayar halkaya sokulması, Şekil 1.26’da gösterildiği gibi hız arsa özelliklerini değiştirecektir.
Bu nedenle, bu üç faz indüksiyon motor kontrol yöntemi, bu nedenle sabit bir torkun hızını kontrol etmek için uygun değildir.
Ancak bu yöntem, gerekli çiftin hız azaldıkça önemli ölçüde düştüğü yükler için yaygın olarak kullanılmaktadır, örneğin, hız azaldığında beslenme girişinin önemli ölçüde düştüğü fan yükleri gibi, bu da rotorun bakır kayıplarını azaltır.
Ek olarak, bu yöntem sürekli hız kontrolü için kabul edilmez, ancak aralıklı çalışma (kısa süre) için tercih edilir. Böyle bir hız kontrol yöntemi pratikte, düşük güçlü motorlarda ve hava vinçlerinde yaygın olarak kullanılmaktadır.
Bununla birlikte, bazen silindirlerin hızının düzenlenmesi için, özellikle de devredeki şarj tepe noktalarını azaltmak için fırfırlar ile birlikte kullanılır.
Burada, seyir kontrolü olarak adlandırılan reostat, yük arttığında otomatik olarak açıktır ve bu nedenle hız azalır ve yükün bir kısmı direksiyon simidinin kinetik enerjisinin zararına dengelenir.
Tersine, yük azaldığında, rotor devresine direnç azalır; Hız artar ve direksiyon kinetik enerjiyi depolamaya başlar.
6. İkincil yabancı gerilim kontrolü
Bu yöntemde, bir indüksiyon motorunun hızı, ikincil devrede bir kayar frekans voltajı enjekte edilerek kontrol edilir.
Enjekte edilen voltaj, EMF’nin ikincil devrede indüklenmesi ile uyumlusa, ikincil devredeki dirençteki bir azalmaya eşdeğerdir, bu nedenle kayma azalır veya hız artar.
Rotor devresinde indüklenen CMF ile fazda kayar frekans gerginliği enjekte ederek süper senkron hızlara ulaşmak mümkündür.
Enjekte edilen voltaj, EMF’nin ikincil devrede indüklenmesi muhalefet fazında ise, ikincil devredeki direnci arttırmaya eşdeğerdir, bu nedenle kayarda bir artış veya hızda bir azalma ile sonuçlanır.
Bu nedenle, rotor devresine frekans dönüşüm ekipmanı ekleyerek bu yöntemle çok çeşitli hız kontrolü mümkündür.
Bu yöntemde, daha düşük verimlilik ve zayıf hız düzenlemesinin dezavantajları aşılır, ancak ikincil devreye kayar bir frekans EMF enjekte etmek için bir ve genellikle daha yardımcı makineler gerektirir, bu nedenle, çelik fabrikalardaki motorlarda olduğu gibi daha pahalıdır ve çok büyük not motorlarıyla kullanılır.
İkincil devrede kayan bir frekans gerginliği enjekte ederek indüksiyon motorlarının hızını kontrol etmek için çeşitli yöntemler geliştirilmiştir.
Farklı yöntemler yardımcı ekipman için gereksinimlerinde farklılık gösterir; İndüksiyon motorunun tasarımına yardımcı ekipmanın kendisinin dahil edilmesinden, oldukça karmaşık bir yardımcı döner makineler ve ayarlanabilir oran transformatörleri sistemine.
Böyle bir sistemin doldurması gereken temel kriter: (i) değişken yabancı gerginliğin kayma frekansına sahip olması, yani SF’ye eşit bir frekans ve (ii) yabancı gerilim ile ilişkili enerjinin geri kazanılabilir olduğu.
Bu prensibe dayanan en yaygın sistemler Kramer sistemi, leblanc sistemi ve çoklu indüksiyon motorlarının Scherbius hız kontrol sistemidir.
7. Birleştirme ile hız kontrolü
Bu yöntemde, en azından birinin yara rotoruna sahip olması gereken iki motor gereklidir. İki motor ortak bir yüke neden olmak için mekanik olarak birleştirilebilir.
Bunlardan birinin statorunun sarılması, bir yara rotor motoru, üç faz AC güç kaynağına bağlanırsa ve rotor sargısı ikinci motor statorunun sarısına bağlanırsa, kombinasyonun hızı toplam veya iki makinedeki kutup sayısındaki farkla belirlenir.
Uygulamada, birinci makinenin rotor çıkışını ikinci makineden stator’a, ikisinin dönüş alanlarının aynı yönde olacak şekilde bağlamak olağandır; Bu durumda, ortaya çıkan hız aşağıdaki ifade ile belirlenecektir.

Veya
- F gıda frekansıdır,
- P1 ve P2, sırasıyla I ve II makinelerindeki kutup sayısıdır.
Bir hız elde etmek için, normalin üstünde, ikinci motorun torku, ikinci motorun ipliklerinden ikisini değiştirerek tersine çevrilir. Buna diferansiyel şelale denir ve bu koşul altında ifade ile verilecektir.

İsterseniz ek bir hız kontrolü, ikinci bir makine tipi makineye sahip olarak ve ikinci makinenin rotor devresine kontrol direncini ekleyerek elde edilebilir.

İki motor aynı sayıda kutup varsa ve kümülatif kaskada bağlanmışsa [Eq. (1.77)], neredeyse yarısını çalıştıracaklar. Diferansiyel kaskadda ağacın torku büyük ölçüde azaltıldığından, pratikte kullanılmaz.
İki makinenin mekanik çıkışı yaklaşık olarak raporunda

veya P1: P2, yani makinelerdeki kutup sayısının oranında.