Caractéristiques de glissement de couple du moteur à induction:
L’expression des caractéristiques de glissement de couple du moteur d’induction (t (s)) est facilement obtenue en trouvant l’équivalent de la thevenin du circuit à gauche de AB sur la figure 9.12.
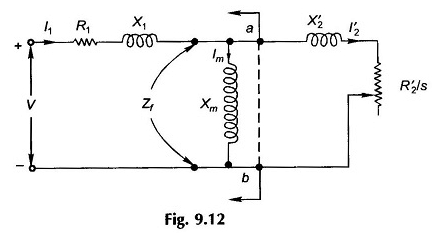
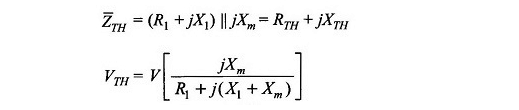
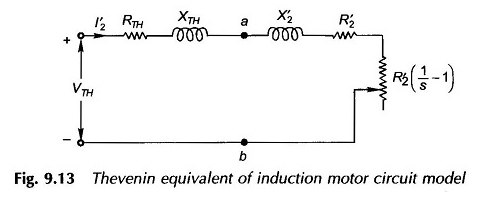
Le circuit se réduit ensuite à la figure 9.13 dans laquelle il est pratique de prendre VTH comme tension de référence.
De la figure 9.13

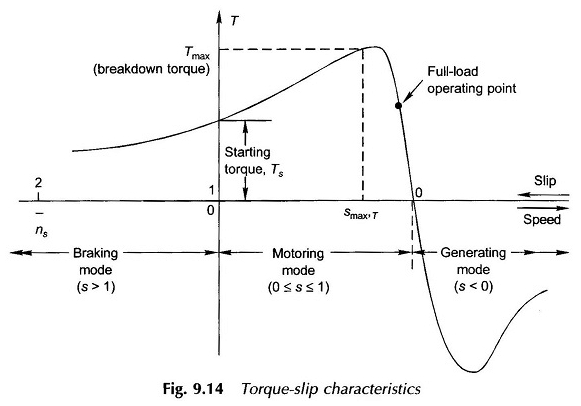
L’équation (9.22) est l’expression du couple développé en fonction de la tension et du glissement. Pour une valeur donnée de glissement, le couple est proportionnel au carré de tension. Les caractéristiques de glissement de couple du moteur d’induction à la tension fixe (nominale) sont tracées sur la figure 9.14.
Les caractéristiques des caractéristiques de glissement de couple du moteur à induction sont répertoriées ci-dessous:
1. MODE MOTORIE: 0 ≤ S ≤ 1
Pour cette gamme de glissement, la résistance à la charge dans le modèle de circuit de la figure 9.13 est positive, c’est-à-dire que la puissance mécanique est la sortie ou le couple développé est dans la direction dans laquelle le rotor tourne. Aussi:
- Le couple est nul à S = 0, comme prévu par le raisonnement qualitatif.
- Le couple a une valeur maximale, appelée couple de panne (TBD) à Slip Smax, t. Le moteur décélérerait jusqu’à ce qu’il soit chargé avec plus que le couple de panne.
- À S = 1, c’est-à-dire que lorsque le rotor est stationnaire, le couple correspond au couple de départ, TS. Dans un moteur normalement conçu, TS est beaucoup moins que TBD.
- Le point de fonctionnement normal est situé bien en dessous de TBD. Le bordereau à charge complète est généralement de 2,8%.
- Les caractéristiques de glissement de couple du moteur à induction de l’interdiction de co-charge à un peu au-delà de la charge complète sont presque linéaires.
2. Mode de génération: S <0
Le glissement négatif implique le rotor fonctionnant à une vitesse super synchrone (n> ns). La résistance à la charge est négative dans le modèle de circuit de la figure 9.13, ce qui signifie que la puissance mécanique doit être mise en place pendant que la puissance électrique est éteinte aux bornes de la machine.
3. Mode de freinage: S> 1
Le moteur fonctionne dans la direction opposée au champ rotatif (c’est-à-dire N négatif), absorbant la puissance mécanique (action de freinage) qui est dissipée sous forme de chaleur dans le cuivre du rotor.
Couple maximum (ventilation):
Tandis que le couple maximal et le glissement à laquelle il se produit peut être obtenu en différenciant l’expression de l’équation. (9.22), la condition pour le couple maximal peut être plus facilement obtenue à partir du théorème de transfert de puissance maximal de la théorie des circuits.
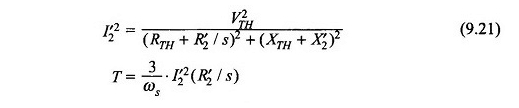
Comme nous le savons, le couple est maximum lorsque I’22 (R’2 / S) est maximum, c’est-à-dire que la puissance maximale est absorbée par R’2 / S sur la figure 9.13. Cette condition est donnée comme

Substituant dans l’équation. (9.22) et simplifier

Il est immédiatement observé que le couple maximal est indépendant de la résistance au rotor (R’2) tandis que le glissement auquel il se produit est directement proportionnel à elle.
La caractéristique de glissement de couple d’un moteur à induction à anneau de glissement peut être facilement modifiée en ajoutant une résistance externe comme le montre la figure 9.15a par quatre de ces caractéristiques avec une résistance progressive croissante dans le circuit du rotor. On peut voir que selon l’équation.
(9.24), le couple maximal reste inchangé en fonction de l’équation. (9.23) Le glissement à un couple maximal augmente proportionnellement à mesure que la résistance est ajoutée au circuit du rotor.

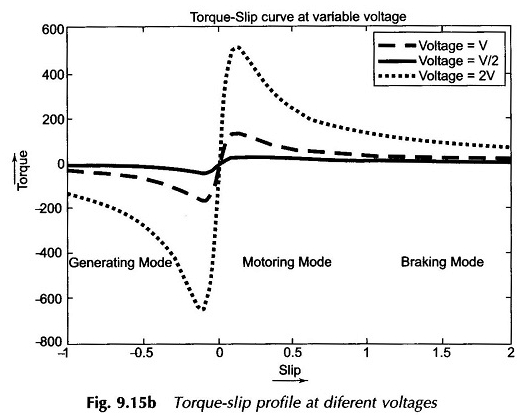
La figure 9.15b indique le profil TS à diverses tensions d’alimentation. La vitesse peut également être contrôlée de cette manière en modifiant la tension du stator. On peut noter que le couple s’est développé dans un moteur d’induction en proportionnel au carré de la tension du terminal.
Couple de départ:
Laissant S = 1 dans l’équation. (9.22)

Le couple de départ augmente en ajoutant une résistance dans le circuit du rotor. De l’équation. (9.23) Le couple de démarrage maximal est obtenu pour (smax’t = 1)

Dans le même temps, le courant de départ réduira (voir Eq. (9.21)). C’est en effet l’avantage du moteur à induction à anneau à glissement dans lequel un couple de démarrage élevé est obtenu à un courant de démarrage faible.
Une approximation:
Parfois, pour avoir une sensation (réponse approximative) de la caractéristique opérationnelle, il est pratique de supposer que l’impédance du stator est négligeable qui mène (voir Fig. 9.13)
![]()
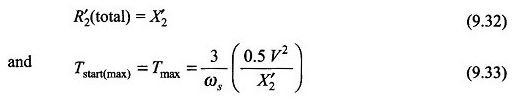
dans le circuit équivalent de Thevenin de la figure 9.13 de sorte que VTH = V. il découle ensuite des équations (9.21) à (9.26) que

Le couple de départ maximal est obtenu à la condition
Quelques relations approximatives à faible glissement:
Autour de la vitesse nominale (pleine charge), le glissement du moteur à induction est si petit que
![]()
afin que X’2 puisse être complètement négligé dans une analyse simplifiée. Équations (9.27) et (9.28) puis simplifier à
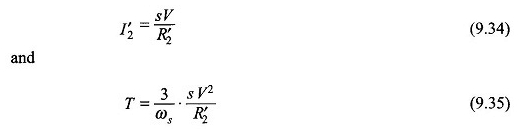
Il est immédiatement observé à partir de l’équation. (9.35) que les caractéristiques de glissement de couple du moteur d’induction sont presque linéaires dans la région de faible glissement qui explique la forme linéaire de la caractéristique comme le montre la figure 9.14.
Sortie de sortie maximale:
Étant donné que la vitesse du moteur à induction se réduit avec la charge, la puissance de sortie mécanique maximale ne correspond pas à la vitesse (glissement) à laquelle un couple maximal est développé. Pour une puissance de sortie mécanique maximale, la condition est obtenue à partir de la figure 9.13

La puissance maximale peut ensuite être trouvée correspondant au glissement défini par l’équation. (9.36). Cependant, cette condition correspond à une très faible efficacité et à un très grand courant et est bien au-delà de la région de fonctionnement normale du moteur.
Limitation des caractéristiques de glissement de couple du moteur à induction:
Les valeurs des paramètres du modèle de circuit doivent être déterminées dans des conditions se rapprochant étroitement de la condition de fonctionnement pour laquelle le modèle doit être utilisé.
Les paramètres du modèle de circuit valides pour la condition de fonctionnement normale donneraient des résultats erronés lorsqu’ils sont utilisés pour des valeurs anormales de glissement.
Au démarrage, le moteur tire plusieurs fois le courant nominal entraînant une saturation du noyau et une augmentation conséquente des réactances de fuite du stator et du rotor. De plus, la fréquence du rotor étant élevée (identique au stator), les conducteurs de rotor présentent une résistance plus élevée.
Par conséquent, les paramètres bons pour les conditions de fonctionnement normaux donneraient un résultat pessimiste pour le courant de démarrage (plus grande que la valeur réelle) et le couple de démarrage.