Caractéristiques de vitesse de couple du moteur à induction:
De l’équation. 1.27 On peut observer que le couple maximal est indépendant de la résistance au rotor. Cependant, le glissement auquel le couple maximum se produit change avec la résistance au rotor.
Lorsque la résistance au rotor augmente, le glissement pour le couple maximum est également un couple maximal et la plage de glissement de fonctionnement stable du moteur augmente. Les caractéristiques typiques de la vitesse du couple du moteur d’induction pour différentes valeurs de résistance au rotor sont représentées sur la figure 1.22.
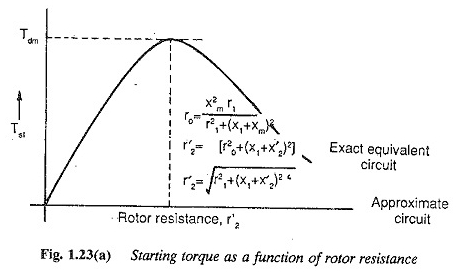
De la figure, on constate que le couple de départ peut être augmenté en augmentant la résistance au rotor. Le couple maximal se produit au démarrage si la résistance au rotor est augmentée à une valeur.

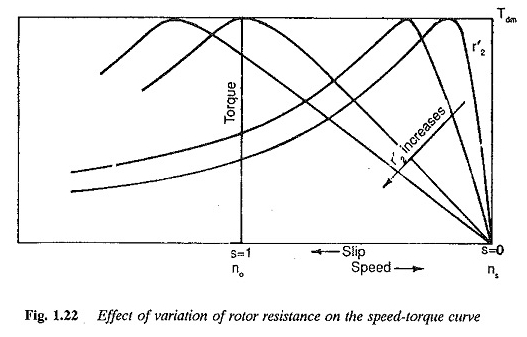
Si l’impédance du stator est négligée, la résistance au rotor doit être augmentée à une valeur égale à la réactance des fuites du rotor. Si la résistance au rotor augmente au-delà de cette valeur, le couple de départ diminue.
Le couple de panne se produit à des glissements supérieurs à un (dans la région de freinage). Le courant de départ diminue et le facteur de puissance de départ est meilleur à des valeurs accrues de résistances au rotor.
Le glissement à pleine charge change, facilitant le contrôle de la vitesse dans une plage limitée lorsque la résistance au rotor est variée. Cependant, l’efficacité est altérée à des résistances élevées du rotor en raison d’une augmentation des pertes. Le chauffage du rotor est présent dans un rotor intrinsèquement à haute résistance.
En bref, les performances de démarrage du moteur sont améliorées avec de grandes résistances au rotor tandis que les performances de course sont altérées.
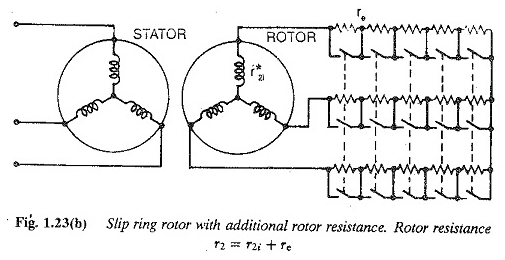
Pour obtenir les avantages d’une résistance élevée au rotor au démarrage, une résistance supplémentaire est connectée dans le circuit du rotor du moteur à induction du rotor de la plaie et coupé lentement à mesure que le rotor accélère. À vitesse nominale, le moteur fonctionne sur sa caractéristique naturelle. Les connexions sont représentées sur la figure 1.23 (b).
Cependant, la connexion d’une résistance supplémentaire n’est pas possible dans les moteurs de cage d’écureuil. Des constructions de rotors spéciales, telles que des rotors à double cage et de bar profonds, sont utilisés.
Au démarrage, en raison de la fréquence de rotor élevée, le courant distribue dans la cage externe d’un rutor à double cage ou dans la partie supérieure de la barre dans le cas d’un rotor de barre profond. L’effet d’une résistance élevée est ainsi atteint.
À mesure que le moteur accélère, la fréquence du rotor diminue et le courant se répartit dans les deux cages du rotor à double cage ou dans la barre complète dans le rotor de la barre profonde. La résistance efficace est petite et les performances de course sont améliorées. Les courbes typiques de la vitesse de couple sont représentées sur la figure 1.23.
Effet de la variation de tension dans le moteur d’induction:
La caractéristique de vitesse-Torque d’un moteur à induction peut être modifiée par l’effet de la variation de tension dans le moteur d’induction. Les caractéristiques typiques de la vitesse du couple du moteur d’induction lorsqu’elles sont fournies à partir de tension variable à la fréquence nominale sont données sur la figure 1.24 (a).
Ils sont basés sur le fait que le couple du moteur à induction (à un glissement donné) varie comme le carré de la tension. Le glissement pour le couple maximum est indépendant de la tension. Le couple de charge complète se produit à différents glissements lorsque la tension est variée.
Cela rend le contrôle de vitesse des moteurs d’induction faisable sur une plage limitée par variation de tension d’alimentation. Cependant, la capacité de couple du moteur diminue à basse tension, en raison de la réduction du flux d’espace d’air. Le facteur de puissance diminue.
Le moteur attire des courants lourds pour développer un couple donné à basse tension. Le courant dessiné à différentes tensions est illustré sur la figure 1.24 (a), ainsi que le couple développé à un courant nominal à différentes tensions.
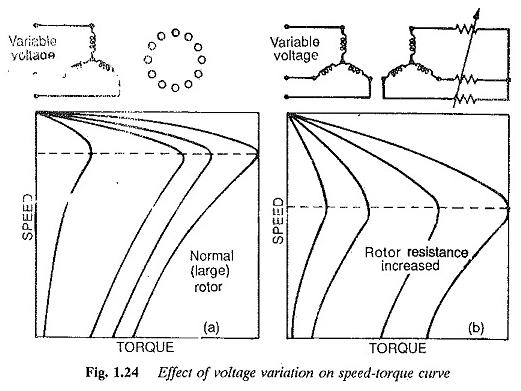
La figure 1.24 (b) montre les avantages d’une résistance élevée dans le rotor lorsque la tension appliquée est variée pour modifier la caractéristique de vitesse-couple.
En plus d’augmenter la plage de contrôle de vitesse, le courant tiré par le moteur à basse tension peut être limité par un choix approprié de résistance au rotor.
Pole changeant dans le moteur à induction:
La courbe de vitesse de vitesse d’un moteur à induction peut être modifiée par un enroulement en armature reconnecté pour donner différents ensembles de pôles. Lorsque le nombre de poteau changeant dans le moteur à induction, il en va de même pour la vitesse.
Le type de connexion décide de la charge autorisée à un couple constant ou à une puissance constante. Cette méthode de changement de poteau dans le moteur à induction convient aux moteurs à cage d’écureuil car leurs rotors peuvent adopter un certain nombre de pôles. Aucune reconnexion de l’enroulement du rotor n’est requise.
Si, d’un autre côté, un rotor à anneau de glissement est utilisé, il doit être reconnecté à différents ensembles de pôles. L’enroulement de poteau qui en résulte est utilisé pour la reconnexion. Le pas de bobine change efficacement à différentes vitesses.
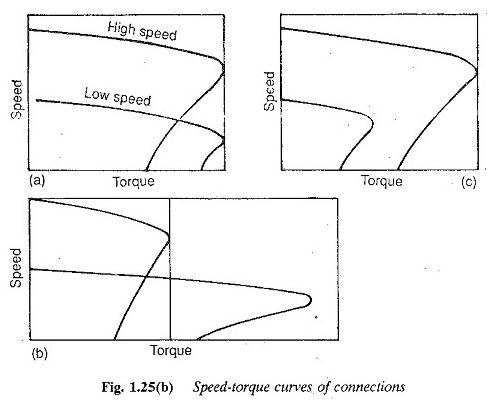
Chaque phase a un enroulement divisé en moitiés. Ceux-ci sont connectés en série ou en parallèle, pour modifier efficacement le nombre de pôles. Les combinaisons possibles sont représentées sur la figure 1.25.
Le fonctionnement de puissance constant est fourni par la connexion série-delta pour les vitesses élevées et l’étoile parallèle pour les basses vitesses. À des vitesses élevées, un couple faible est développé de sorte que la puissance est constante. La tension par moitié est v / 2 dans la connexion à grande vitesse et v / √3 à basse vitesse.
Connexions parallèles et séries-star en série pour des vitesses élevées et basse
Récupération de puissance de glissement du moteur à induction:
La modification de la caractéristique de vitesse-couple à l’aide d’une résistance à rotor variable présente l’inconvénient majeur d’une mauvaise efficacité, ce qui le rend non rentable. Un fonctionnement à basse vitesse continu n’est pas possible en raison de la surchauffe du rotor.
Ces basses vitesses peuvent être réalisées très efficacement avec une efficacité raisonnable en utilisant des schémas de récupération d’énergie de glissement. La puissance de glissement qui est gaspillée dans la résistance externe dans le circuit du rotor est renvoyée dans le secteur de ces schémas.
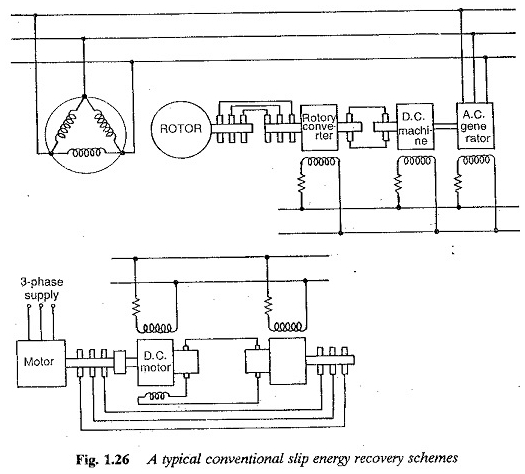
Les méthodes conventionnelles de récupération de puissance de glissement utilisent des machines rotatives, telles que les convertisseurs rotatifs, les alternateurs, les machines DC, etc. dans le circuit du rotor pour convertir la puissance à la fréquence de glissement en puissance à la fréquence de ligne. Certains schémas conventionnels typiques, appelés contrôles Scherbius et Kramer, sont représentés sur la figure 1.26.

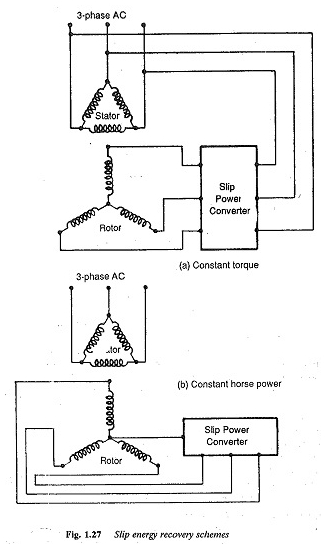
Lorsque ces méthodes sont utilisées, le moteur / non doit fonctionner pour entraîner à la fois un couple constant et des charges d’alimentation constantes. Ceux-ci sont illustrés sur la figure 1.27 (a) et (b), en principe. Sur la figure.
1.27 (a) La puissance du rotor à la fréquence de glissement est convertie en fréquence de ligne au moyen d’un convertisseur de glissement. Si le convertisseur de puissance de glissement permet le flux de puissance dans les deux sens, le moteur peut être utilisé à la fois à des vitesses sub et super synchrones.
Ce schéma est utilisé pour entraîner des charges de couple constantes. En fonctionnement sous-synchrone, la puissance de glissement est convertie en fréquence de ligne et alimentée en secteur. En fonctionnement supersynchrone, la puissance à la fréquence de ligne est convertie en puissance de glissement et alimentée au moteur.
Une caractéristique importante de cette modification est que le couple développé est proportionnel au courant de rotor sous l’hypothèse d’un flux constant dans le moteur. Les courbes de couple de vitesse pour ce schéma sont représentées sur la figure 1.28 (a).
La modification souhaitée des courbes de vitesse de couple montrée sur la figure 1.28 (a) est obtenue en contrôlant le convertisseur de puissance de glissement pour correspondre à la tension du moteur à un glissement donné. Le contrôle du convertisseur est représenté par le paramètre a.
L’augmentation d’une augmentation de la tension du côté rotor du convertisseur de puissance de glissement provoquant une chute de vitesse. A May il a fixé pour les conditions à vide, fixées à une valeur à vide, le moteur a une caractéristique de vitesse de vitesse tombante.
Par exemple, A peut être l’angle de tir du convertisseur côté ligne dans le cas des schémas de puissance de glissement statique.
Le schéma illustré sur la figure 1.27 (b) utilise la puissance de glissement pour conduire une machine auxiliaire. Dans ce cas, le convertisseur de puissance de glissement est couplé au rotor du moteur à induction et en tire la puissance. Ici aussi, les vitesses sub et super synchrones sont possibles.
En fonctionnement sous-synchrone, la machine auxiliaire convertit la puissance de glissement en puissance mécanique. En fonctionnement supersynchrone, la puissance supplémentaire est alimentée aux enroulements du rotor à travers le convertisseur de glissement de la machine auxiliaire. La connexion maintient une puissance constante.
Les caractéristiques de vitesse de couple du moteur à induction sont représentées sur la figure 1.28 (b). Ici également, A est un paramètre du convertisseur de glissement choisi de manière à provoquer le contrôle de vitesse comme décrit ci-dessus, lorsqu’il est varié d’une manière donnée. La puissance de glissement est gérée par l’arbre du moteur principal. Le couple diminue avec une augmentation de la vitesse.
Avec la disponibilité des convertisseurs de puissance de thyristor, les cascades de convertisseur statique (invertisseur redresseur) sont utilisées dans les circuits du rotor des moteurs d’induction pour obtenir les modifications susmentionnées à la caractéristique de vitesse-torque. Les schémas sont représentés sur la figure 1.29 (a).
La puissance de glissement est rectifiée et alimentée au convertisseur commune de ligne qui alimente la puissance vers le secteur. Les courbes de vitesse-Torque obtenues par la variation de l’angle de tir de l’onduleur sont représentées sur la figure 1.29 (6). Un cycloconverteur peut également être utilisé dans le circuit du rotor.
Injection de tension dans le circuit du rotor:
La caractéristique de la vitesse de couple d’un moteur à induction peut être modifiée en injectant une tension dans le circuit du rotor (rotor de plaie) d’un moteur à induction. La tension injectée doit être à la fréquence de glissement.
Si la tension injectée s’oppose à la tension du rotor, le courant de rotor effectif diminue, ce qui affecte instantanément le couple. Le couple réduit ne peut pas conduire la charge.
La vitesse du rotor diminue à une valeur qui assure une tension de rotor induite suffisante et donc un courant de rotor pour entraîner la charge. Si, en revanche, la tension injectée aide à la tension du rotor, elle entraîne une augmentation du courant de rotor.
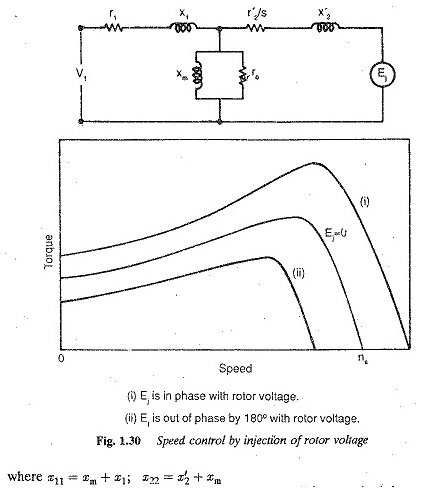
L’augmentation du couple développé accélère le rotor à une vitesse à laquelle un courant de rotor suffisant circule pour entraîner la charge. Les courbes de couple de vitesse pour les deux cas sont représentées sur la figure 1.30.
À titre de comparaison, la courbe de vitesse de couple d’un rotor court en circuit avec une tension injectée zéro est également indiquée. D’après les chiffres, il peut être déduit qu’il est possible de modifier la capacité de couple du moteur en modifiant la tension injectée.
Lorsque la tension injectée s’oppose à la capacité de couple de courant du rotor diminue, alors qu’elle augmente lorsque la tension injectée facilite la tension du rotor.
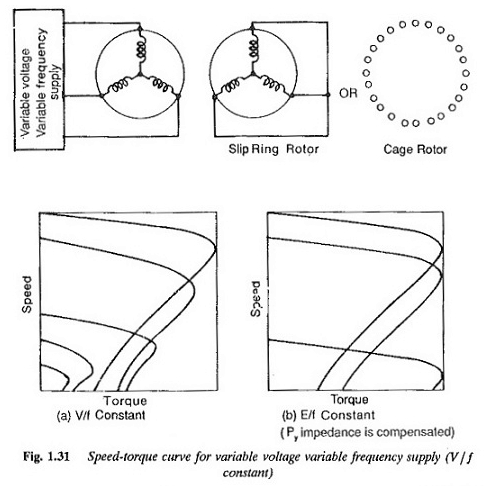
Variation de la fréquence d’alimentation:
La vitesse d’un champ magnétique tournant de manière synchrone est fonction de la fréquence d’alimentation. Par conséquent, en faisant varier la fréquence d’alimentation, la vitesse synchrone et donc la vitesse du rotor peuvent être variées.
Pour éviter la saturation en raison d’une augmentation du flux à basse fréquence, la tension appliquée au moteur est également variée de sorte que le flux reste constant à sa valeur nominale à toutes les fréquences.
Pour y parvenir, une méthode simple consiste à varier à la fois la tension et la fréquence afin que V / F soit constant. Les courbes de vitesse de couple avec V / F constant sont représentées sur la figure 1.31.
Il y a une épuisement de couple à basse fréquence. Le moteur a réduit la capacité de couple et la capacité de surcharge. Cela est dû à l’effet dominant de la résistance du stator aux basses fréquences.


La baisse de résistance devient appréciable par rapport à la tension appliquée. Cela provoque une épuisement du flux, dont la constance ne peut pas être maintenue à basse fréquence. Le couple développé avec V / F constante est
Pour avoir le même couple et la même capacité de surcharge à toutes les fréquences, il est nécessaire de compenser la chute du stator (résistance) afin de garder E / F constant. V / F n’est plus constant car il augmente à mesure que la fréquence diminue. Le couple développé dans ce cas est donné par

où
L ′ 2σ est l’inductance des fuites du rotor.
Les courbes de vitesse de couple pour E / F constantes sont représentées sur la figure 1.31 (b).
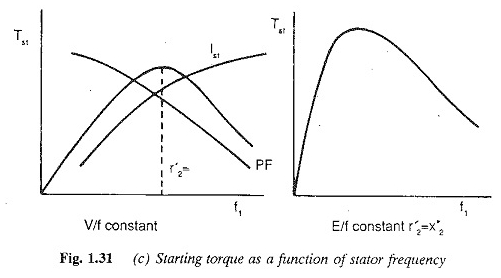
Avec V / F (constant) Control, le couple de départ augmente avec une diminution de la fréquence, jusqu’à une certaine valeur. En dessous de cette valeur de fréquence, le couple de départ diminue. Cet effet est considéré comme similaire à celui réalisé en modifiant la réactance des fuites du rotor.
À mesure que la fréquence diminue, la réactance des fuites du rotor. À mesure que la fréquence diminue, la réactance des fuites du rotor diminue. En effet, une augmentation du rotor, une résistance par rapport à la réactance des fuites a lieu.
Par conséquent, le couple de départ augmente jusqu’à une certaine fréquence, où la réactance des fuites du rotor est égale à la résistance au rotor.
Si la fréquence est diminuée, le couple de départ diminue. La variation du couple de départ avec la fréquence est illustrée à la figure 1.31 (c). Cependant, avec un contrôle E / F constant, le couple de départ augmente à mesure que la fréquence diminue jusqu’à une valeur décidée par les paramètres.
Si la fréquence diminuait encore, le couple de départ diminue. L’accélération peut être obtenue à un couple constant et à un courant d’armature en faisant varier la fréquence du stator à partir d’une valeur faible en gardant E / F constant.
Les caractéristiques de vitesse de couple du moteur à induction sont obtenues en augmentant la fréquence d’alimentation au-delà de la valeur nominale. Le flux du moteur diminue, car la tension ne peut pas être augmentée au-delà de la valeur nominale. Le moteur fonctionne dans le mode d’affaiblissement du flux.
Les courbes de vitesse de couple sont parallèles les unes aux autres à toutes les fréquences, elles s’étendent au deuxième quadrant, montrant que la régénération est possible.
Le démarrage du moteur peut être facilement accompli en utilisant une tension variable, une alimentation en fréquence variable. Cela diminue le courant de départ, donnant un couple accélérant raisonnablement bon à un bon facteur de puissance même avec des moteurs à cage à faible résistance.
Contrôle de vitesse du moteur à induction:
Un moteur à induction triphasé est essentiellement un moteur à vitesse constante. Il n’est pas possible d’obtenir un contrôle de vitesse en douceur du moteur sur une large plage, lorsqu’il est fourni à partir d’une tension constante triphasée conventionnelle, d’alimentation en fréquence constante.
Les convertisseurs de puissance de thyristor ont rendu possible la fréquence variable et les alimentations variables de tension. Ceux-ci sont utilisés pour obtenir un contrôle de vitesse en douceur des moteurs d’induction sur une large gamme.
Les méthodes de modification des caractéristiques de la vitesse du couple du moteur d’induction discutées sont plus ou moins les méthodes de contrôle de la vitesse également. Des convertisseurs de puissance de thyristor sont largement utilisés pour adopter les méthodes de contrôle de la vitesse, par exemple
Un hachoir pour contrôler la résistance au rotor, le contrôleur de tension AC pour varier la tension d’alimentation, les cascades de convertisseur statique pour la récupération d’énergie de glissement, etc.