Construction du moteur à induction triphasée:
Une construction de moteur à induction triphasée nourrie de convertisseur présente les avantages suivants sur un moteur nourri à la ligne:
1. La start-up de linge est garantie par une fréquence variable à partir d’un bas
2. Le démarrage et l’accélération du courant et le couple sont possibles.
3.Le réseau n’est plus soumis à un courant de surtension élevé comme avec l’interrupteur direct sur la construction de moteurs à induction triphasée Cage, et en tant que tel, l’équipement de départ spécial peut être omis même à des cotes élevées.
4. De nombreux moments d’inertie peuvent être accélérés sans avoir besoin de sur dimension du moteur.
5.Le convertisseur agit comme un dispositif de découplage.
Par conséquent, la rétroaction du moteur au point de court-circuit ne se produit pas, lorsque les courts-circuits de ligne, la cote de court-circuit, sur la base desquels le plus grand nombre de services doit être exagéré est donc faible, permettant une économie à faire.
Comme cela a déjà été indiqué, la vitesse de construction du moteur à induction triphasée peut être contrôlée en fournissant au stator une tension variable, une alimentation de fréquence variable à l’aide de convertisseurs de fréquence statique.
Le contrôle de vitesse est également possible en alimentant la puissance de glissement dans le système d’alimentation à l’aide de convertisseurs dans le circuit du rotor. Fondamentalement, on distingue deux méthodes différentes de contrôle de la vitesse.
1.Cougeur Contrôle en faisant varier la fréquence de glissement lorsque le stator est alimenté à partir d’une tension constante, des conduites de fréquence constante.
2.Sice Contrôle du moteur à l’aide d’une tension variable de fréquence variable, fonctionnant le moteur à une fréquence de rotor constante.
Le contrôle de vitesse par variation de la fréquence de glissement est obtenu de la manière suivante:
1.Stator Control de tension à l’aide d’un contrôleur de tension triphasé.
2. Contrôle de la résistance au rotor à l’aide d’une résistance contrôlée par un hachoir dans le circuit du rotor.
3. en utilisant une cascade de convertisseur dans le circuit du rotor pour récupérer l’énergie du glissement.
4. en utilisant un cycloconverteur dans le circuit du rotor.
Contrôle d’un moteur à induction par variation de tension du stator (en utilisant un contrôleur de tension triphasé)
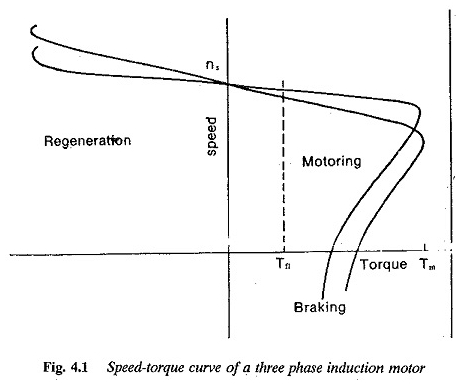
Il est très bien connu que le couple d’une construction de moteurs à induction triphasée varie directement proportionnellement au carré de la tension. Le couple d’un moteur à induction est approximativement donné par

et la courbe de vitesse de couple est comme le montre la figure 4.1. Le glissement pour le couple maximum est donné par 
qui est indépendant de la tension du stator. Cependant, cela peut être varié par la variation de la résistance au rotor. La valeur du couple maximum est donnée par

Cela change également comme le carré de la tension appliquée. Si la tension est réduite à 80%, le couple maximal tombe à 64%. La variation de la tension appliquée est obtenue au moyen d’un contrôleur de tension.
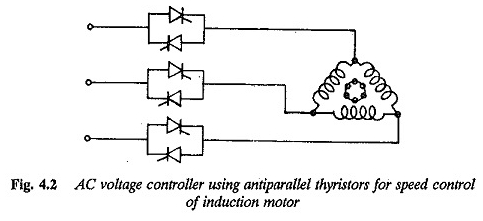
Cette méthode de contrôle de la vitesse d’un moteur à induction est simple et économique. Le contrôle de tension du stator est obtenu au moyen du contrôle de phase des thyristors antiparallèles, connectés comme indiqué sur la figure 4.2.
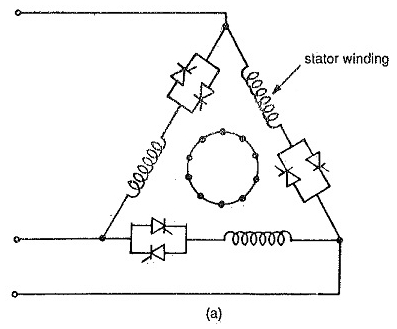
Les figures 4.3 (a) et (b) illustrent deux connexions pratiques d’un contrôleur de tension alimentant une construction de moteur à induction triphasée. Dans la connexion de la figure 4.2, les thyristors doivent gérer uniquement le courant de phase. Les courants harmoniques deviennent plus élevés. Sur la figure 4.3, la pénalité harmonique est plutôt plus.
La tension du stator peut varier de zéro à la pleine valeur dans la plage d’angle de déclenchement. Le facteur de puissance côté ligne est très médiocre en raison des harmoniques et de la puissance réactive due au contrôle de phase.
Lorsqu’un moteur à induction de cage est alimenté à partir d’une alimentation de tension variable pour le contrôle de vitesse, les observations suivantes peuvent être faites:
1.La courbe de vitesse de couple au-delà du point de couple maximum a une forme négative. Un point de fonctionnement stable dans cette région n’est pas possible pour une charge de couple constante.
2.Le contrôleur de tension doit être capable de résister à un démarrage élevé La plage de contrôle de vitesse est plutôt limitée.
3.Le facteur de puissance du moteur est médiocre.
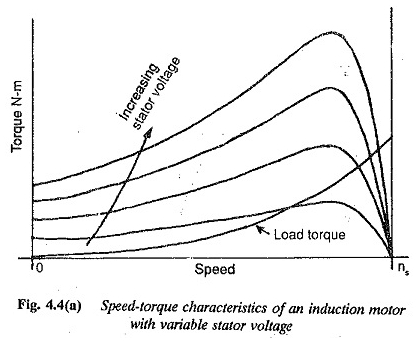
Pour éviter les difficultés ci-dessus, la construction du moteur à induction triphasée doit avoir un rotor à haute résistance. Cela fait le point de changement de couple maximal vers S = 1, réduisant ainsi la région instable de la courbe de vitesse de vitesse.
En raison de l’augmentation de la résistance au rotor, le courant de démarrage diminue, le facteur de puissance s’améliore et la plage de contrôle de la vitesse augmente.
La méthode de contrôle de la vitesse est donc avantageuse avec un rotor à haute résistance. Les courbes de vitesse-Torque pour ce contrôle sont représentées sur la figure 4.4 (a). La note de courant du contrôleur décide du couple possible à chaque vitesse.
La courbe limite du couple en fonction de la vitesse peut être dérivée. La figure 4.4 (b) montre cette courbe de couple limite pour la notation de conception du contrôleur, qui est trois fois le courant nominal du moteur. Le courant en fonction de la vitesse et de la tension du stator est représenté.
Pendant le contrôle, si la valeur actuelle dépasse la valeur limite, la limite de courant automatique doit être utilisée. Par cela, la valeur de l’angle de tir est ajustée jusqu’à ce que le courant autorisé circule.
Même si la méthode est simple et économique, les pertes motrices augmentent avec l’augmentation du glissement. L’augmentation des pertes peut être attribuée à l’augmentation du courant du moteur en raison de la baisse du flux de l’espace d’air ainsi qu’à la forte résistance du rotor.
Le rapport R1 / R′2 peut être considéré comme représentatif pour décider de ces pertes car l’augmentation de la résistance est déterminante dans la limitation du courant tiré. L’efficacité du moteur peut être approximativement donnée par
![]()
où S est le glissement du moteur.
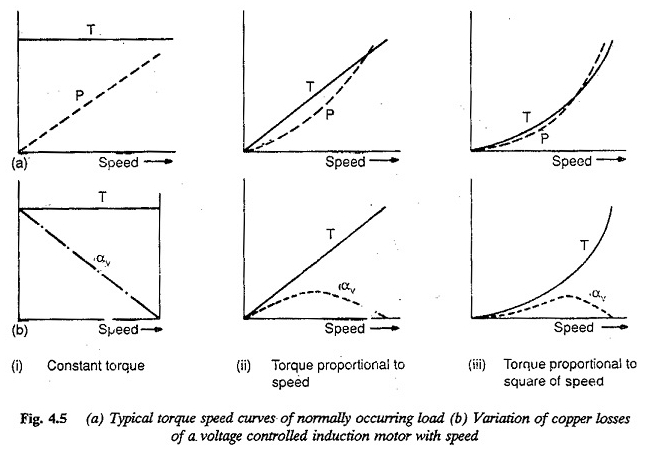
Le type de charge entraîné par le moteur influence le courant dessiné et les pertes du moteur à mesure que le glissement varie. Les charges normalement qui se produisent sont
1. Charges de couple confortables
2.Torque variable proportionnel à la vitesse
3.Torque variable proportionnel au carré de la vitesse

Considérons que les caractéristiques de vitesse de couple de la charge sont données par une équation générale
![]()
Si la valeur de x = 0, il équivaut à une charge de couple constante. X> 0 pour les charges de couple variable (Fig.4.5a).
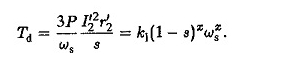
Les pertes de cuivre du rotor
![]()
où PD1 est la puissance de l’espace d’air ou l’entrée d’alimentation du rotor.

Mais le glissement du moteur
et l’entrée d’alimentation du rotor
![]()
La valeur maximale de puissance transférée au rotor est
![]()
Les pertes de cuivre lorsqu’elles sont exprimées comme le rapport de Pd1max que nous avons
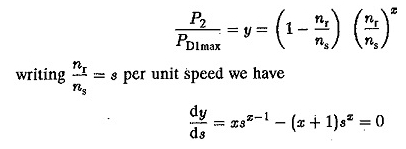
pour la valeur de SAT dont y est maximum. La valeur de

Pour une valeur maximale de la perte de cuivre du rotor. Les valeurs maximales des pertes de cuivre du rotor sont données par

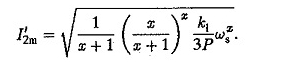
À mesure que la valeur de X augmente, la valeur de YM diminue. La valeur maximale du courant du rotor et de la vitesse unitaire à laquelle elle se produit peut également être déterminée. Nous avons
à partir de laquelle le courant de rotor
![]()
par vitesse unitaire pour la valeur maximale du courant du rotor est également
![]()
La valeur maximale du courant du rotor peut être déterminée comme
Pour les cas spéciaux
La variation des pertes est représentée sur la figure 4.5 (b) pour différents types de charges. Les charges de couple constantes ne sont pas privilégiées en raison de l’augmentation des pertes linéairement avec le glissement et devenant maximale à S = 1,0.
Ceci est évident, à partir de la variation du flux car la tension est variée pour le contrôle de la vitesse. Pour maintenir un couple constant, le moteur attire un courant lourd, ce qui entraîne un mauvais couple / ampère, une mauvaise efficacité et un mauvais facteur de puissance à basse vitesse.
Lorsque le couple varie en proportion directe pour accélérer, les pertes de cuivre ont une valeur maximale de 25% de puissance nominale à une vitesse de 0,5 Ω.
Pour les couples proportionnels au carré de la vitesse, la vitesse unitaire à laquelle les pertes de cuivre sont maximales est de 2/3 et la valeur maximale des pertes de cuivre est de 0,149 de puissance nominale.
La méthode de contrôle de la vitesse peut être utilisée avantageusement pour des charges de pompe ou de ventilateur où le couple est proportionnel au carré de la vitesse.
À partir de la discussion ci-dessus, cette méthode de contrôle de la vitesse ne convient que pour les cas suivants:
1.Pour des opérations de courte durée où la durée du contrôle de la vitesse est définie.
2. Pour contrôler la vitesse des soufflantes ou des pompes ayant des variations paraboliques ou cubiques de couple avec la vitesse. Cela ne convient pas aux charges de couple constantes dues à une augmentation des pertes et au chauffage.
3. Pour contrôler la vitesse du moteur ayant une mauvaise efficacité sous un fonctionnement normal.
Le type de charge (couple en fonction de la vitesse de la charge) sur le moteur d’entraînement influence les pertes dans le moteur. Les formes d’onde d’entrée non sinusoïdales provoquent des courants non sinusoïdaux qui augmentent les pertes harmoniques.
Par conséquent, les pertes totales augmentent en particulier à faibles vitesses et ces pertes provoquent une éventuelle rétrécissement du moteur, ou un moteur trop dimensionnel doit être utilisé lorsque cette méthode est utilisée.
Pour les charges de type soufflant où T α N2, la valeur maximale du courant se produit à une vitesse de 2/3 de la vitesse de base. Ce courant dépend du glissement de charge complet du moteur. Pour les grands moteurs à glissement (rotors à haute résistance), le rapport du courant maximum à nominal diminue.
Pour les charges de couple constantes, les pertes de puissance augmentent avec la réduction de la vitesse et atteint une valeur maximale à zéro vitesse elle-même. Pour les charges ayant t α n, le maximum se produit à 1/2, la vitesse de base et les pertes s’élèvent à 25% de la puissance du stator.
Les pertes survenant dans le moteur sont responsables de l’élévation de la température du moteur. Les pertes doivent être conservées dans la valeur autorisée afin que le moteur fonctionne toujours avec une augmentation de température autorisée. Les différents types de charges discutées ont tendance à augmenter les pertes de moteur.
De plus, la forme d’onde de la tension d’entrée est déformée. Le stator et les courants de rotor sont non sinusoïdaux avec un riche contenu harmonique. Ces harmoniques entraînent des pertes supplémentaires. Ils peuvent être considérés comme 50% des pertes de cuivre nominales.
L’augmentation des pertes du moteur à grands glissements conduit à une rétrécissement du moteur. Un moteur normal peut être dégagé de 5 à 6 fois. Si le rotor à haute résistance est utilisé, le facteur aérant diminue.
Les pertes totales du moteur sont

où
FV s’occupe de l’augmentation des pertes dues à la distorsion et est normalement considérée comme 1,5.
PR est la notation du moteur
K1PR est le total des pertes de cuivre du moteur.
Pour maintenir l’élévation de la température autorisée, les pertes autorisées sont

où
η est l’efficacité du moteur
αV est le rapport des pertes à une vitesse minimale aux pertes à note. vitesse.
Évaluation PTVP du moteur.
Le facteur αV dépend du type de chargement utilisé. Pour les machines refroidies par force, il est de 1,0 et indépendant de la vitesse. Si la machine est auto-refroidie, cela dépend de la vitesse. Cette valeur diminue à mesure que la limite inférieure de la vitesse diminue.
Une caractéristique typique pour une machine à deux pôles est représentée sur la figure 4.5 (c). La rétrécation est également affectée par l’efficacité du moteur. À mesure que l’efficacité diminue 1-η / η augmente. Pour ce type de moteurs de contrôle de vitesse du grand rotor, 17 résistance sont utilisées. Ils ont une mauvaise efficacité. Par conséquent, la rétrécation du moteur diminue.

La discussion ci-dessus indique clairement qu’un moteur donné est déformé différemment lorsqu’il entraîne différents types de charges.
En d’autres termes, la puissance requise par la charge est constante, le moteur d’entraînement doit être des cotes différentes pour différents types de courbes de vitesse de couple de la charge, l’exemple suivant l’illustre.