Contrôle de fréquence variable de l’entraînement du moteur à induction:
Contrôle de fréquence variable de l’entraînement du moteur à induction – Vitesse synchrone, par conséquent, la vitesse du moteur peut être contrôlée par une fréquence d’alimentation variable. La tension induite dans le stator est proportionnelle au produit de la fréquence d’alimentation et du flux d’air-gap.
Si la chute du stator est négligée, la tension du terminal peut être considérée comme proportionnelle au produit de la fréquence et du flux.
Toute réduction de la fréquence d’alimentation, sans changement dans la tension terminale, provoque une augmentation du flux d’air-gap. Les moteurs à induction sont conçus pour fonctionner au point de genou de la caractéristique de l’aimantation pour utiliser pleinement le matériau magnétique.
Par conséquent, l’augmentation du flux saturera le moteur. Cela augmentera le courant de magnétisation, déformera le courant et la tension de la ligne, augmentera la perte de noyau et la perte de cuivre du stator et produisent un bruit acoustique à haut foyer.
Bien qu’une augmentation du flux au-delà de la valeur évaluée soit indésirable à partir de la considération des effets de saturation, une diminution du flux est également évité pour conserver la capacité de couple du moteur.
Par conséquent, le contrôle de la fréquence variable de l’entraînement du moteur d’induction en dessous de la fréquence nominale est généralement effectué au flux d’air-gap nominal par une tension de borne variable avec la fréquence afin de maintenir la constante de rapport (v / f) à la valeur nominale. De l’équation. (6.13)
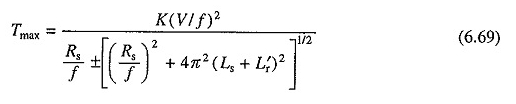
où K est une constante, et LS et L ′ R sont, respectivement, le stator et le stator ont référé les inductances du rotor. Le signe positif concerne le fonctionnement de l’automobile et le signe négatif est pour le fonctionnement de freinage.
Lorsque la fréquence n’est pas faible, (rs / f) ≪ 2π (ls + l′ r) et donc, à partir de (6,69)

L’équation (6,70) suggère qu’avec un rapport constant (v / f), le moteur développe un couple maximum constant, sauf à basse vitesse (ou fréquences). Le moteur fonctionne donc en mode couple constant. Selon Eq.
(6.69), pour les basses fréquences (ou les faibles vitesses) en raison de la chute de résistance du stator [c’est-à-dire lorsque (RS / F) n’est pas négligeable par rapport à 2π (LS + L′ R)] Le couple maximum aura une valeur inférieure dans le fonctionnement de moteur (signe -eve) et une plus grande valeur dans le fonctionnement du freinage (Signe -ve).
Ce comportement est dû à la réduction du flux pendant le fonctionnement de l’automobile et à l’augmentation du flux pendant le fonctionnement du freinage. Lorsqu’il est nécessaire que le même couple maximal soit conservé à basse vitesse également en fonctionnement de l’automobile, le rapport (v / f) est augmenté à basse fréquence.
Cela provoque une augmentation supplémentaire du couple de freinage maximal et une saturation considérable de la machine dans le fonctionnement du freinage.
Lorsque V sature ou atteint la valeur nominale à la vitesse de base, elle ne peut pas être augmentée avec la fréquence. Par conséquent, au-dessus de la vitesse de base, la fréquence est modifiée avec V constante. Selon Eq. (6.70), avec V maintenu constant, le couple maximum diminue avec l’augmentation de la fréquence (ou de la vitesse).
La variation de la tension des bornes avec la fréquence est donc comme le montre la figure 6.33 (a). V est maintenu constant au-dessus de la vitesse de base. En dessous du rapport de vitesse de base (v / f) est maintenu constant, sauf à basse fréquence où le rapport (v / f) est augmenté pour maintenir le couple maximal constant.
Les courbes de couple de vitesse correspondantes sont représentées sur la figure 6.33 (b) à la fois pour les opérations de manche et de freinage. Les courbes suggèrent que le contrôle de la vitesse et le fonctionnement de freinage sont disponibles de près de vitesse à la vitesse supérieure à la vitesse synchrone.

Un couple donné est obtenu avec un courant inférieur lorsque l’opération à n’importe quelle fréquence est limitée entre la vitesse synchrone et le point de couple maximal, à la fois pour les opérations de automobilisation et de freinage.
Par conséquent, le fonctionnement du moteur pour chaque fréquence est limité entre la vitesse synchrone et le point de couple maximal, comme le montrent les lignes pleines de la figure 6.33 (b).
Le contrôle de fréquence variable de l’entraînement du moteur à induction offre de bonnes performances de fonctionnement et transitoires en raison des caractéristiques suivantes:
- Le contrôle de la vitesse et le fonctionnement de freinage sont disponibles de la vitesse zéro à la vitesse de base supérieure.
- Pendant les transitoires (démarrage, freinage et inversion de vitesse), l’opération peut être effectuée au couple maximal avec un courant réduit, ce qui donne une bonne réponse dynamique.
- Les pertes de cuivre sont faibles, et l’efficacité et le facteur de puissance sont élevés car l’opération est limitée entre la vitesse synchrone et le point de couple maximal à toutes les fréquences.
- La baisse de la vitesse de l’absence de charge à pleine charge est petite.
L’avantage le plus important de la commande de fréquence variable de l’entraînement du moteur à induction est qu’il permet à un entraînement variable avec une bonne fonction de fonctionnement et de performances transitoires ci-dessus à partir d’un moteur d’induction de cage d’écureuil.
Le moteur de cage d’écureuil présente un certain nombre d’avantages par rapport à un moteur à courant continu. Il est bon marché, robuste, fiable et plus durable.
En raison de l’absence de commutateur et de brosses, il ne nécessite pratiquement aucune entretien, il peut être exploité dans un environnement explosif et contaminé, et peut être conçu pour des vitesses, des tensions et des cotes d’énergie plus élevées. Il a également une inertie, un volume et un poids plus faibles.
Bien que le coût d’un moteur à cage d’écureuil soit beaucoup plus faible par rapport à celui d’un moteur à courant continu de la même note, le coût global des entraînements de moteur à induction de fréquence variable, en général, sont plus élevés.
Mais en raison des avantages énumérés ci-dessus, les lecteurs de moteur à induction de fréquence variable sont préférés aux disques du moteur CC pour la plupart des applications.
Dans des applications spéciales nécessitant un fonctionnement sans entretien, telles que les installations souterraines et sous-marines, ainsi que dans des applications impliquant des environnements explosifs et contaminés, comme dans les mines et l’industrie chimique, les lecteurs moteurs à induction de fréquence variable sont un choix naturel.
Ils ont plusieurs autres applications telles que la traction, les tables de moulin, les aciéries, les pompes, les ventilateurs, les soufflantes, les compresseurs, les lecteurs de broche, les transporteurs, les machines-outils, etc.
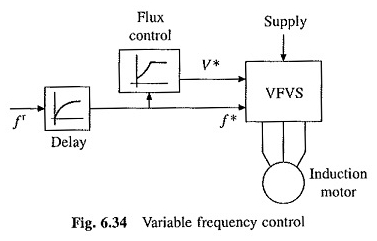
Le schéma de bloc de la commande de fréquence variable du schéma de conduite du moteur d’induction est illustré à la figure 6.34. Le moteur est alimenté à partir d’une source de tension variable de fréquence variable (VFV). V * et F * sont des commandes de tension et de fréquence pour VFVS.
Le bloc de commande de flux produit une commande de tension v * pour les VFV afin de maintenir la relation de la figure 6.33 (a) entre V * et F *. La fréquence de référence f * est modifiée en vitesse de contrôle.
Un circuit de retard est introduit entre F * et FR, de sorte que même lorsque Ft est modifié d’une grande quantité, F * ne changera que lentement pour que la vitesse du moteur puisse suivre les changements de FT, restreignant ainsi le fonctionnement du moteur pour chaque fréquence entre la vitesse synchrone et le point de couple maximal. Les VFV peuvent être un onduleur de source de tension ou un cycloconverteur.
Contrôle de la vitesse de glissement:
Soit V et F la tension et la fréquence nominales de la machine. Lorsque le moteur est utilisé en dessous de la vitesse de base avec un contrôle constant (v / f), pour une fréquence, KF, la tension terminale sera KV, où K est un facteur tel que 0 ≤ k ≤ 1. Ainsi, car la fréquence est passée de 0 à F, k passe de 0 à 1 et que la tension change de 0 à V.
Se substituant à la tension KV et à la fréquence KF et négligeant la chute de résistance du stator, des équations (6.4) et (6.10)
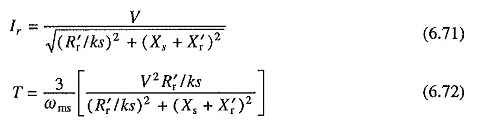
Dans les équations. (6.71) et (6.72) IF (KS) est maintenu constant car k est varié, alors le courant du rotor I’R et le couple t resteront constants. Étant donné que le glissement est petit i’r sera en phase avec tension. Puisque le flux est constant, IM sera également constant. Maintenant
![]()
Ainsi, si le fonctionnement du moteur est effectué à une valeur constante de KS à mesure que la fréquence est variée, le moteur fonctionnera à un courant constant et à un couple. Examinons le sens de KS.
À la fréquence kf
Remarque ωst est la vitesse de glissement, qui est la différence dans la vitesse de champ rotative KΩms et la vitesse du rotor ωm. Il s’agit également de la chute de la vitesse du moteur de sa vitesse de charge sans charge, lorsque la machine est chargée.
La discussion ci-dessus montre. Que pour toute valeur de T, la baisse de la vitesse du moteur à partir de sa vitesse de charge (kΩms) est la même pour toutes les fréquences. Par conséquent, les caractéristiques du couple de vitesse de la machine pour 0
Le fonctionnement de la machine à une vitesse de glissement constante implique également le fonctionnement à une fréquence de rotor constante comme indiqué ci-dessous

où FR et ωR sont respectivement la fréquence du rotor en Hz et Rad / Sec.
Pour s > (xs + x′r), donc à partir des équations. (6.72) et (6.73)

Eqn. (6.76) suggère que pour s
Selon la discussion ci-dessus, pour une vitesse de glissement, le courant du moteur et le couple ont les mêmes valeurs à toutes les fréquences. Ainsi, le courant du moteur et le couple peuvent être contrôlés en contrôlant la vitesse de glissement.
En outre, le courant du moteur peut être limité dans une limite de sécurité en limitant la vitesse de glissement. Ce comportement est utilisé dans un contrôle de vitesse en boucle fermée pour limiter le courant dans une limite autorisée.
Laissez-nous ensuite considérer l’opération au-dessus de la vitesse de base. Comme indiqué précédemment, la machine fonctionne à une tension constante V. maintenant

Comme la fréquence est supérieure à la note K> 1. Étant donné que l’opération est à nouveau limitée entre la vitesse synchrone et le couple maximum, le glissement a une petite valeur, donc

Ainsi, pour les vitesses au-dessus de la vitesse de base, à un I’R donné et donc approximativement à une don, la vitesse de glissement ωsl augmente linéairement avec k (ou fréquence). Ce comportement est utilisé dans un contrôle de vitesse en boucle fermée pour limiter le courant dans la valeur autorisée au-dessus de la vitesse de base.
Étant donné que le glissement est petit, i’r est en phase avec V. Si la perte de cuivre de la machine est négligée, la puissance développée est donnée par
![]()
Par conséquent, le PM est constant pour un I’R donné, et donc pour une donnée est. Le lecteur fonctionne donc en mode puissance constante.
Limitations de couple et de puissance, et modes de fonctionnement:
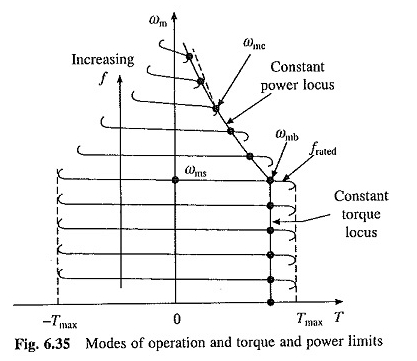
Les variations de couple et de puissance pour un courant de stator donné et pour les fréquences en dessous et au-dessus de la fréquence nominale sont représentées par des points sur la figure 6.35.
Lorsque le courant du stator a la valeur maximale autorisée, celles-ci représenteront le couple maximal et les capacités d’alimentation du moteur dans le contrôle de fréquence variable de l’entraînement du moteur d’induction.
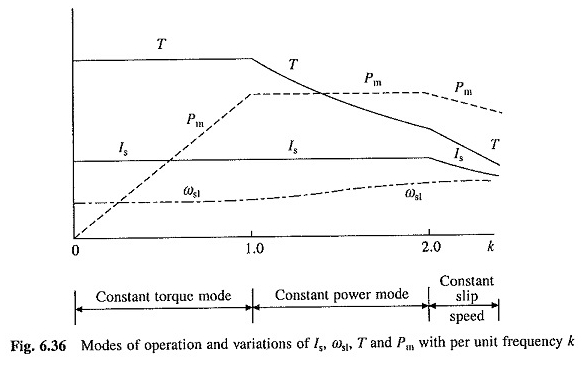
La variation des capacités maximales de couple et de puissance avec fréquence est représentée sur la figure 6.36. La variation de la vitesse de glissement ωsl avec la fréquence est également représentée sur cette figure.
Comme le montre les Fig. 6.35 et 6,36, le moteur a un couple maximum constant de zéro à la vitesse de base ωMM, donc le lecteur fonctionne en mode de couple constant. Dans cette gamme de fréquences, V est modifié avec la fréquence comme le montre la Fig.
6.33 (a) et la vitesse de glissement au courant maximal autorisé reste constante. De la vitesse de base à la vitesse ωmc, la puissance maximale a une valeur constante, donc le moteur fonctionne en mode puissance constante. À vitesse ωMC (Fig. 6.35), le couple de panne est atteint.
Toute tentative de faire fonctionner le moteur au courant maximum autorisé au-delà de cette vitesse calera le moteur. Par conséquent, au-delà de la vitesse ωmc, la machine fonctionne à une vitesse de glissement constante et le courant maximum autorisé et la puissance maximale peuvent diminuer (Fig. 6.36).
Maintenant, le courant du moteur réduit inversement avec la vitesse et le couple diminue inversement à mesure que la vitesse est carrée. L’opération dans cette région est requise dans les disques nécessitant une large plage de vitesse mais un couple faible à des vitesses élevées.
Par exemple, dans les applications de traction, le lecteur fonctionne dans cette région lorsqu’il fonctionne à pleine vitesse car le couple requis en état d’équilibre à grande vitesse est très faible par rapport à sa valeur pendant l’accélération.